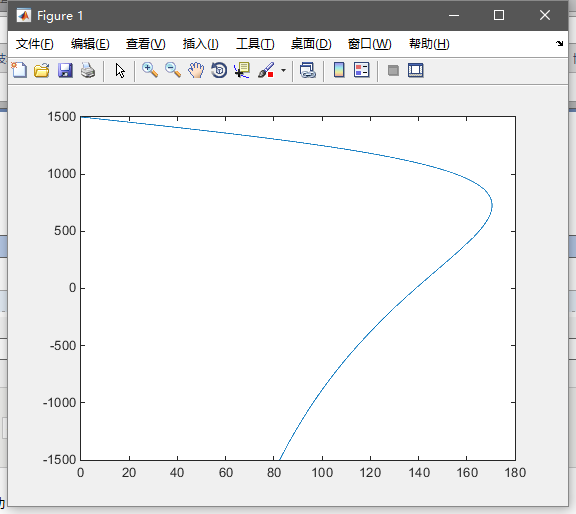
一、机械特性图
先空转测得T、N,可计算出K;
绘出机械特性图;
代码、图见附录
二、控制运动实验
选定方案:定子串电阻降压启动,转子串电阻调速(包括倒拉制动),能耗制动
对给定的转速,可以计算出对应的R2值,从而确定应串入的电阻值;
结合仿真结果,多次调整阶跃信号的时间,可以达到运动要求;
代码、图见附录
三、疑问问题和反思
1、仍和上次实验一样出现刚度问题,虽能仿真成功,但知其然不知其所以然。
2、测系统机械特性算K值时有一个问题:仿真图形初始段有震荡,不应在此取点,但不知原因。
3、计算出来的结果没有考虑电机摩擦,电机里摩擦系数那一项如果为题目设定的0.01,则仿真结果速度不能精确控制,设置为0则可精确达到预设转速。
4、只使用阶跃信号控制电阻、电源需要结合多次仿真结果反复调整,最后得到的速度保持时间实际上是“测出来的”、不是事先设计出来的,有投机取巧之嫌,耗时耗力、也不利于实际生产,应该有更好的控制方法。
附录:
1、原始机械特性及代码
syms K
U=220
N1=154.434*60/(2*pi)
No=1500
S=(No-N1)/No
X20=2*pi*50*2.52/1000
T1=11.1314
R2=0.408
f=T1-K*S*R2*U*U/((R2^2)+(S*X20).^2)
K=solve(f==0)
N=linspace(-1500,1500,10000)
S=(No-N)/No
S1=S*X20
RS=R2^2+S1.^2
US=K*S*R2*U*U
T=US./RS
plot(T,N)
2、串入电阻的调速特性及代码
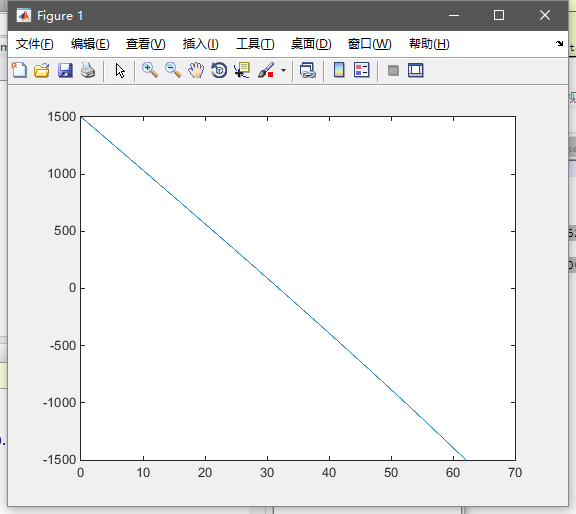
求电阻
syms x
U=220
Nm=1027.67
No=1500
Sm=(No-Nm)/No
X20=2*pi*50*2.52/1000
K=0.00541
N=linspace(0,1500,10000)
S=(No-N)/No
R2=0.408
S1=S*X20
RS=R2^2+S1.^2
US=K*S*R2*U*U
T=US./RS
T1=15
SR=(No-800)/No
f=T1-K*SR*x*U*U/((x^2)+(SR*X20).^2)
x=solve(f==0)

syms x
U=220
Nm=1027.67
No=1500
Sm=(No-Nm)/No
X20=2*pi*50*2.52/1000
K=0.00541
N=linspace(0,1500,10000)
S=(No-N)/No
R2=0.408
S1=S*X20
RS=R2^2+S1.^2
US=K*S*R2*U*U
T=US./RS
T1=15
SR=(No+600)/No
f=T1-K*SR*x*U*U/((x^2)+(SR*X20).^2)
x=solve(f==0)
3、仿真结果

