Kinect SDK v2预览版,获取数据的基本流程的说明。以及取得Color图像的示例程序的介绍。
上一节,是关于当前型号Kinect for Windows(后面称作Kinect v1)和次世代型的Kinect for Windows的开发者预览版(后面称作Kinect v2 预览版)的配置比较和介绍。
从这一节开始,是Kinect的各种数据的取得方法的比较和介绍。
Color Camera
Kinect和通常的Web摄像头一样,搭载了 Color Camera,可以取得Color图像。关于Camera,Kinect v1的分辨率是640×480,Kinect v2分辨率大幅提升到1920×1080。这次,要介绍从Color Camer取得图像的方法。
数据取得的流程
Kinect SDK v1和Kinect SDK v2预览版取得数据的基本流程。
这里表示的是最基础的流程,在Kinect SDK 在v2预览版里,有把多个「Source」「Reader」一齐处理的API,和这里介绍的数据获取的流程也会有差异。
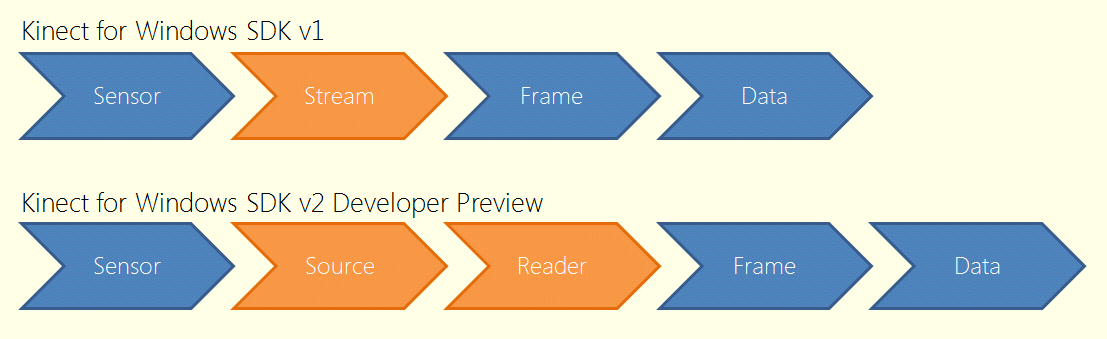
图1是Kinect SDK v1和Kinect SDK v2预览版的数据取得流程
Kinect SDK v1,是从「Sensor」打开「Stream」,从「Stream」取得「Frame」,从「Frame」取得数据这样的流程。
到了Kinect SDK v2预览版,是从「Sensor」取得「Source」,从「Source」打开「Reader」,从「Reader」取得「Frame」,从「Frame」取得数据这样的流程。
每个Kinect SDK v2预览版的「Source」,都有一个从Kinect取得Color和Depth的1个数据流,这点和Kinect SDK v1的「Stream」是一样的。
Kinect SDK v2预览版,追加了「Reader」的阶段。「Reader」能打开1个「Source」多次。通过这个配置,多线程的应用上,不需要把取得的数据拷贝到其他线程处理。也有多个应用可以从同一个传感器取得数据的优点。
(注:因为Color Camera和Depth Camera是分离的,所以Color、Depth和Skeleton数据流也是各自独立的,API通过Event来通知App是否有数据更新。通常为了效率,对每一个数据流都使用单独的线程来等待Event,然后处理数据。在之前的v1中,Frame是独立的,取出后数据就被Drop掉了,所以想在Depth里读取Color之类的操作,必须使用内存拷贝,而多线程读写数据又会需要互斥锁,十分影响效率;还有一个办法是通过NuiSetFrameEndEvent,也就是c#接口中的AllFrameReady事件,但是这样等待所有数据不仅太局限而且效率很低。)
示例程序
Kinect SDK v2预览版取得Color画像的示例程序的展示,图1展示的是数据取得阶段的摘录解说。这个示例程序的全部内容,在下面的github里公开了。
这个示例程序为了处理图像数据,使用了OpenCV。OpenCV的详细内容可以参考下面的信息。
「Sensor」
取得「Sensor」
-
// Sensor IKinectSensor* pSensor; ……1 HRESULT hResult = S_OK; hResult = GetDefaultKinectSensor( &pSensor ); ……2 if( FAILED( hResult ) ){ std::cerr << "Error : GetDefaultKinectSensor" << std::endl; return -1; } hResult = pSensor->Open(); ……3 if( FAILED( hResult ) ){ std::cerr << "Error : IKinectSensor::Open()" << std::endl; return -1; }
列表1.1 相当于图1「Sensor」的部分1 处理Kinect v2预览版的Sensor接口。2 取得默认的Sensor。3 打开Sensor。
「Source」
从「Sensor」取得「Source」。
从「Sensor」取得「Source」。
-
// Source IColorFrameSource* pColorSource; ……1 hResult = pSensor->get_ColorFrameSource( &pColorSource ); ……2 if( FAILED( hResult ) ){ std::cerr << "Error : IKinectSensor::get_ColorFrameSource()" << std::endl; return -1; }
列表1.2 相当于图1「Source」的部分1 获取Color Frame的Source接口。2 从Sensor取得Source。
「Reader」
「Source」从打开「Reader」。
-
// Reader IColorFrameReader* pColorReader; ……1 hResult = pColorSource->OpenReader( &pColorReader ); ……2 if( FAILED( hResult ) ){ std::cerr << "Error : IColorFrameSource::OpenReader()" << std::endl; return -1; }
列表1.3 相当于图1「Reader」的部分1 获取Color Frame的Reader接口。2 从Source打开Reader。
「Frame」~「Data」
从「Reader」取得最新的「Frame」。
-
int width = 1920; ……1 int height = 1080; ……1 unsigned int bufferSize = width * height * 4 * sizeof( unsigned char ); ……2 cv::Mat bufferMat( height, width, CV_8UC4 ); ……3 cv::Mat colorMat( height / 2, width / 2, CV_8UC4 ); ……3 cv::namedWindow( "Color" ); while( 1 ){ // Frame IColorFrame* pColorFrame=nullptr; ……4 hResult=pColorReader->AcquireLatestFrame( &pColorFrame ); ……5 if( SUCCEEDED( hResult ) ){ hResult = pColorFrame->CopyConvertedFrameDataToArray( bufferSize, reinterpret_cast<BYTE*>( bufferMat.data ), ColorImageFormat_Bgra ); ……6 if( SUCCEEDED( hResult ) ){ cv::resize( bufferMat, colorMat, cv::Size(), 0.5, 0.5 ); ……7 } } SafeRelease( pColorFrame ); // Show Window cv::imshow( "Color", colorMat ); if( cv::waitKey( 30 ) == VK_ESCAPE ){ break; } }
列表1.4 相当于图1「Frame」,「Data」的部分1 Color图像的尺寸(1920×1080)。这里为了简化说明,画像尺寸用硬编码来设定,示例程序可以从Source取得着Frame信息。2 Color图像的数据尺寸。3 为了处理Color图像,准备OpenCV的cv::Mat。「bufferMat」是原始的图像数据,「colorMat」是Resize图像数据的处理。「CV_8UC4」,是无符号8bit整数(8U),4个channel(C4)并列来表现1个像素的数据格式。4 取得Color图像的Frame接口。5 从Reader取得最新的Frame。6 从Frame取得Color图像。默认的格式是YUY2(亮度与色差表现的格式),不过可以经过简单处理变换为BGRA。7 缩小为长宽各一半的尺寸(960×540)。
从「Frame」取得Color图像的数据时,Kinect SDK v1是预先指定图像尺寸和格式,Kinect SDK v2不能指定图像尺寸。因此,取得数据后可以按任意形状来整理。
取出的Color图像直接显示的话尺寸太大(1920×1080),在这里采用了OpenCV的resize命令(cv::resize()),缩小为长宽各一半的尺寸(960×540)。(注:阅读理解时不要受这一段缩放代码的干扰,仅仅就是为了考虑在显示器上显示的方便观察,没别的意义。)
取出的Color图像的数据如果指定的是BGRA格式,就会像图2一样的排列着。蓝(B),绿(G),红(R),和无效值(A)的共计32bit构成1像素。
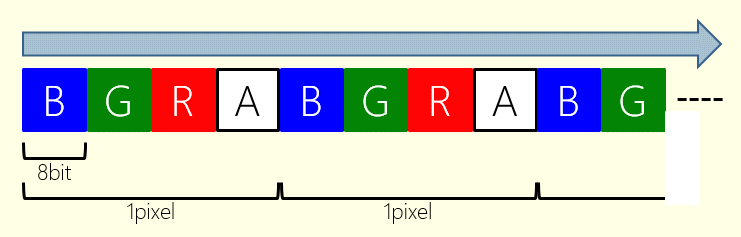
图2 Color图像的数据排列
运行结果
运行这个示例程序的话,就会像图3那样,显示从Kinect v2预览版中取得的Color图像。

总结
本节介绍了从Kinect SDK v2预览版中取得数据的基本流程和取得Color图像的示例程序,下一节将介绍取得Depth数据的示例程序。