在MATLAB 2019 或者 2020 等高版本里,使用机器人工具箱(robotics toolbox/RTB)对机器人进行可视化时(比如robot.teach,robot.plot)会报错:
Index exceeds the number of array elements (4). Error in SerialLink/plot>create_robot (line 473) d = norm( d(4:6)-d(1:3) ) / 72; Error in SerialLink/plot (line 256) handle = create_robot(robot, opt); Error in SerialLink/teach (line 102) robot.plot(q, args{:});
而在MATLAB 2018b及更早版本中不会报错。此时只需在可视化语句之前加上
view(3)
即可解决。
然而每次都要写这个太麻烦了,有一个一劳永逸的办法。首先在命令窗口里键入
edit SerialLink.plot
之后应该弹出
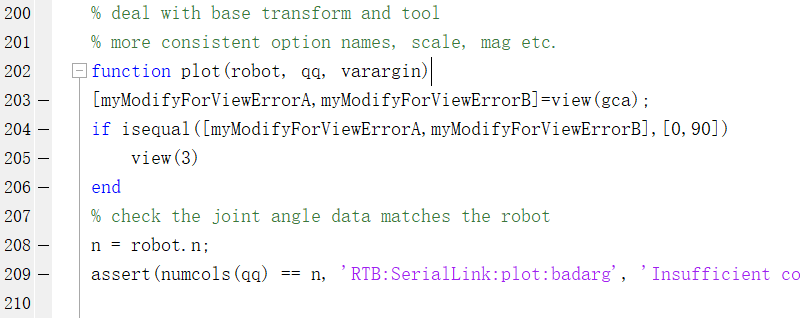
然后在函数的第一行开始加入
[myModifyForViewErrorA,myModifyForViewErrorB]=view(gca); if isequal([myModifyForViewErrorA,myModifyForViewErrorB],[0,90]) view(3) end
如图:
之后就不需要每次都写view(3)了,和旧版本的用法一致。
注意以上代码不能简单用view(3)代替,如果只写view(3)的话会在程序运行时不能拖动视角。按照当前解决方案,每次调用SerialLink.plot都会判断一下当前视角,造成执行效率变低一点点点点点,而且当你拖动到正俯视图视角时会自动变成view(3)视角。如果你有更好的解决方案,欢迎留言交流。