从vb6到vb.net,一路c#, java, python, nn, c,对技术的切换早已经没有害怕的感觉了,一直有的是技术的热情和我所认为的技术信仰。
扯完,开始正文。
看看效果图:

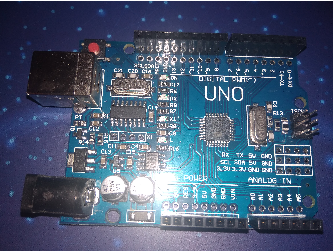
使用的是Arduino UNO+16 Servo Drive Board+2个SG90舵机(左右手分别1个舵机摇摆)
Arduino UNO:
16 Servo Drive Board

然后将这2块叠在一起插上引脚硬件就好了
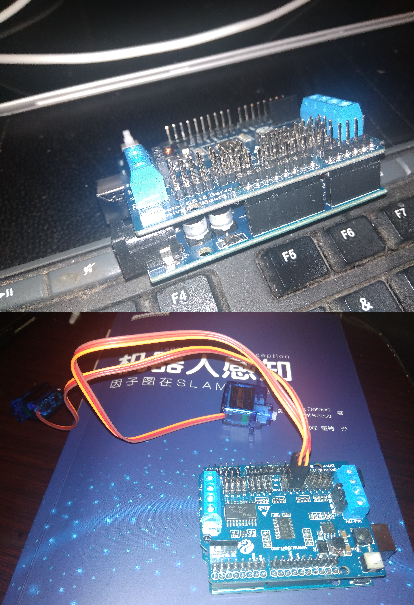
连的是5和6引脚

接下来就程序了,直接编码算是很简单的,就2步:
- 拷贝厂商的.h/.cpp文件夹到arduino的libraries目录
- 写代码如下:
-
#include <Adafruit_PWMServoDriver.h> #define SERVOMIN 200 #define SERVOMAX 540 #define SERVOMIN_Angle 0 #define SERVOMAX_Angle 112 Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(); void servo_goto_angle(int pinId, int angle) { int anglePwmValue=map(angle, SERVOMIN_Angle, SERVOMAX_Angle, SERVOMIN, SERVOMAX); pwm.setPWM(pinId,0, anglePwmValue); } void servo_init() { Serial.begin(9600); pwm.begin(); pwm.setPWMFreq(60); delay(200); } void setup(){ servo_init(); } void loop(){ for (int i = 1; i <= 112; i = i + (1)) { servo_goto_angle(5, i); delay(10); } for (int i = 112; i >= 1; i = i + (-1)) { servo_goto_angle(5, i); delay(10); } for (int i = 1; i <= 112; i = i + (1)) { servo_goto_angle(6, i); delay(10); } for (int i = 112; i >= 1; i = i + (-1)) { servo_goto_angle(6, i); delay(10); } }
然后交叉编译,上传就好了。
可是(哈哈,这里还有,故意空出了一大段),考虑到我还要教女儿学会这个,就不能这么直接代码给她看了,毕竟才小学1年级,还好,有mixly,好,希望来了,图形化编程来了。

鼓捣了一般,最后发现通用的组件都能用,只是这个舵机由于是厂商买来的,还没法很好的支持,得自定义!这下麻烦了,找了点mixly二次开发的资料看了看,最终决定自己写mixly插件。
看了看mixly插件其实就是用js编写外观以及生成代码部分拼c代码出来,然后就好办了,下面是完整插件的目录结构(xml是描述文件、block中的js是生成积木外观的、generator中的js是生成c代码的):
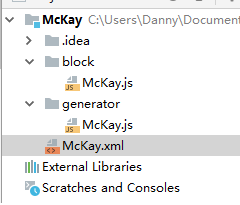
McKay.xml
<!-- type="company" block="block/McKay.js" generator="generator/McKay.js" media="media/McKay" language="language/McKay" --> <script type="text/javascript" src="../../blocks/company/McKay.js"></script> <script type="text/javascript" src="../../generators/arduino/company/McKay.js"></script> <category id="McKay_ServoDriveBoard" name="McKay-舵机" colour="20"> <block type="ServoDriveBoard_Init"> <value name="MinAngle"> </value> <value name="MaxAngle"> </value> </block> <block type="ServoDriveBoard_Do"> <value name="ServoNumber"> </value> <value name="Angle"> </value> </block> </category>
blockMcKay.js
'use strict'; goog.provide('Blockly.Blocks.McKay'); goog.require('Blockly.Blocks'); Blockly.Blocks.ServoDriveBoard_Init={ init:function(){ this.appendDummyInput("") .appendField("初始化舵机"); this.appendValueInput("MinAngle").setCheck(Number).appendField("最小角度"); this.appendValueInput("MaxAngle").setCheck(Number).appendField("最大角度"); this.setColour(20); this.setPreviousStatement(true); this.setNextStatement(true); this.setInputsInline(false); this.setTooltip("初始化舵机"); } }; Blockly.Blocks.ServoDriveBoard_Do={ init:function(){ this.appendDummyInput("") .appendField("舵机运行"); this.appendValueInput("ServoNumber").setCheck(Number).appendField("舵机编号"); this.appendValueInput("Angle").setCheck(Number).appendField("角度"); this.setColour(20); this.setPreviousStatement(true); this.setNextStatement(true); this.setInputsInline(true); this.setTooltip("舵机运行"); } };
generatorMcKay.js
'use strict'; goog.provide('Blockly.Arduino.McKay'); goog.require('Blockly.Arduino'); Blockly.McKay_ServoDriveBoard_MinAngle=0; Blockly.McKay_ServoDriveBoard_MaxAngle=0; Blockly.Arduino.ServoDriveBoard_Init=function(){ var MinAngle = Blockly.Arduino.valueToCode(this, 'MinAngle', Blockly.Arduino.ORDER_ATOMIC) || '0'; var MaxAngle = Blockly.Arduino.valueToCode(this, 'MaxAngle', Blockly.Arduino.ORDER_ATOMIC) || '112'; Blockly.McKay_ServoDriveBoard_MinAngle=parseInt(MinAngle); Blockly.McKay_ServoDriveBoard_MaxAngle=parseInt(MaxAngle); Blockly.Arduino.definitions_["define_McKay_ServoDriveBoard_Include"] = "#include <Adafruit_PWMServoDriver.h> "; var defines="#define SERVOMIN 200 "; defines+="#define SERVOMAX 540 "; defines+="#define SERVOMIN_Angle "+Blockly.McKay_ServoDriveBoard_MinAngle+" "; defines+="#define SERVOMAX_Angle "+Blockly.McKay_ServoDriveBoard_MaxAngle+" "; Blockly.Arduino.definitions_["define_McKay_ServoDriveBoard_Defines"] = defines; Blockly.Arduino.definitions_["define_McKay_ServoDriveBoard_pwmObj"] = "Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(); "; var gotoCode="void servo_goto_angle(int pinId, int angle) "; gotoCode+="{ "; gotoCode+=" int anglePwmValue=map(angle, SERVOMIN_Angle, SERVOMAX_Angle, SERVOMIN, SERVOMAX); "; gotoCode+=" pwm.setPWM(pinId,0, anglePwmValue); "; gotoCode+="} "; Blockly.Arduino.definitions_["define_McKay_ServoDriveBoard_goto_angle"] = gotoCode; var initCode="void servo_init() "; initCode+="{ "; initCode+=" Serial.begin(9600); "; initCode+=" pwm.begin(); "; initCode+=" pwm.setPWMFreq(60); "; initCode+=" delay(200); "; initCode+="} "; Blockly.Arduino.definitions_["define_McKay_ServoDriveBoard_initCode"] = initCode; return "servo_init(); "; }; Blockly.Arduino.ServoDriveBoard_Do=function(){ var ServoNumber = Blockly.Arduino.valueToCode(this, 'ServoNumber', Blockly.Arduino.ORDER_ATOMIC) || '0'; var Angle = Blockly.Arduino.valueToCode(this, 'Angle', Blockly.Arduino.ORDER_ATOMIC) || '0'; var code="servo_goto_angle("+ServoNumber+", "+Angle+"); "; return code; };
多年编程经验的你肯定得出结论其实就是通过js拼string,string里是c代码。。。
然后就可以老少皆宜的写代码了:

有兴趣玩玩这些,挺有意思的
欢迎加入钉钉创客Maker群:
