单舵轮(叉车)AGV里程计数据解算
2016-07
单舵轮AGV,一般包含一个驱动轮和两个从动轮,驱动轮是同时具备行走和转向两个功能的舵轮,因此,单舵轮AGV的运动学自由度为2个。舵轮线速度V1,舵轮转角θ。
AGV机器人里程计一般包含2 个方面的信息:
一、是位姿(位置和转角),即(x,y,θ)。
二、是速度(前进速度AGV的线速度V和转向速度AGV的角速度W)。
为了建立理想运动学模型,我们需要假设以下情况:
一、舵轮与地面之间行走无滑动摩擦;
二、AGV运行的平面为水平面,没有坡度;
建立单舵轮AGV理想运动学模型,如下图所示。设舵轮的线速度为Vf ,前后轮轴向距离为L ,舵轮横向偏距为 D ,舵轮转角(逆时针为正,顺时针为负)为θ,两定向轮轴心点o(x,y,yaw,V,W)为AGV几何中心计算里程计数据。
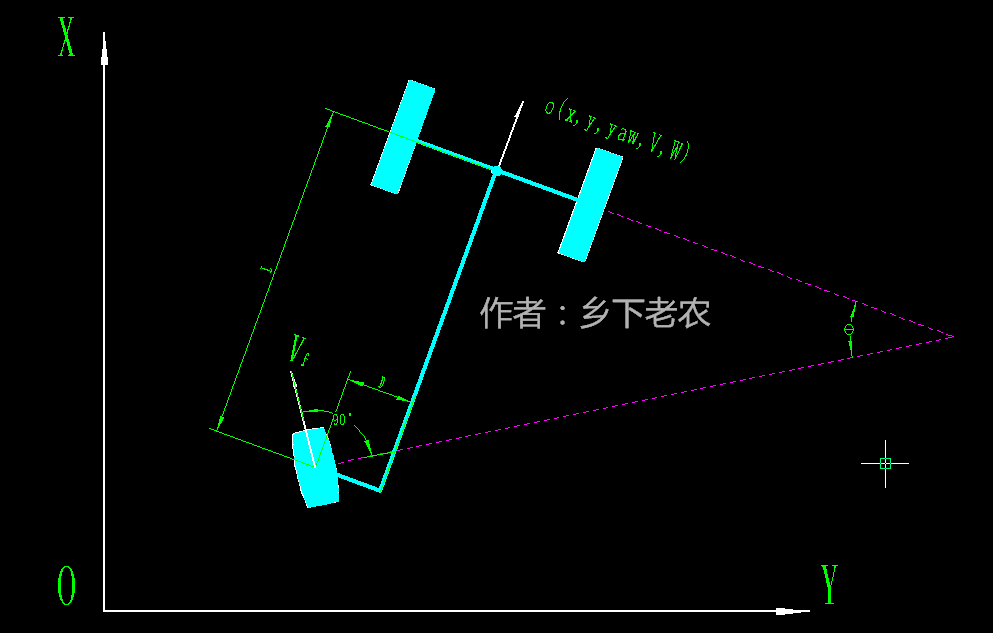
其中舵轮Vf及θ需要通过增量编码器和角度编码器实时检测。
经过几何运算o点里程计数据的:
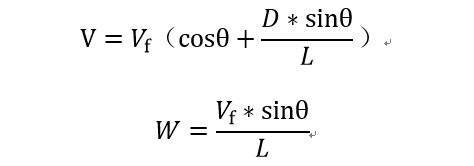
- o点其他里程计数据的(x,y,yaw),是通过V和W数据根据各数据的几何关系不断的积分求得。这里对于单舵轮AGV的里程计数据的介绍只开个头,后不再详细解释,开发人员需要养成深入的去探索的习惯。关于AGV控制的其他问题相互探讨,可以评论咨询联系方式。
实际测试时,机器人的移动距离和转动角度都要进行测试(要确保机器人的实际运动方向与发送的速度指令方向一致,并且偏差在正常范围内),如果测试与预期情况不一样则需要查找原因。另外由于轮子打滑、以及各种误差的影响,对速度积分进行航迹推算得到的里程计累积误差会越来越大,角度yaw也是同样的道理,可以加入轮径参数、滑动摩擦参数对其进行调节补偿。测试的方式是,单舵轮AGV机器人从一个固定参考位置开始运动,主要是前进后退以及旋转,最终回到起始位置,比较计算与实际的差距,来调节轮径参数、滑动摩擦参数。
当前机器人导航方式中地图导航,比如激光slam、二维码惯导等方式,均需要精确地里程计数据支持。