原创作品转载请注明出处《Linux内核分析》MOOC课程http://mooc.study.163.com/course/USTC-1000029000
如果我写的不好或者有误的地方请留言
-
题目自拟,内容围绕操作系统是如何工作的进行;
-
博客中需要使用实验截图
-
博客内容中需要仔细分析进程的启动和进程的切换机制
-
总结部分需要阐明自己对“操作系统是如何工作的”理解。
实验报告:
1.首先咱们来分析代码
通过分析下面的代码 我们知道PCB究竟长什么样子
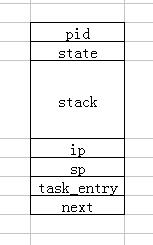
struct Thread { unsigned long ip; unsigned long sp; }; typedef struct PCB{ int pid; volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */ char stack[KERNEL_STACK_SIZE]; /* CPU-specific state of this task */ struct Thread thread; unsigned long task_entry; struct PCB *next; }tPCB;
2.接下来咱们分析一下mymain.c
void __init my_start_kernel(void) { int pid = 0; int i; /* Initialize process 0*/ task[pid].pid = pid; task[pid].state = 0;/* -1 unrunnable, 0 runnable, >0 stopped */ task[pid].task_entry = task[pid].thread.ip = (unsigned long)my_process; task[pid].thread.sp = (unsigned long)&task[pid].stack[KERNEL_STACK_SIZE-1]; task[pid].next = &task[pid]; /*fork more process */ for(i=1;i<MAX_TASK_NUM;i++) { memcpy(&task[i],&task[0],sizeof(tPCB)); task[i].pid = i; task[i].state = -1; task[i].thread.sp = (unsigned long)&task[i].stack[KERNEL_STACK_SIZE-1]; task[i].next = task[i-1].next; task[i-1].next = &task[i]; } /* start process 0 by task[0] */ pid = 0; my_current_task = &task[pid]; asm volatile( "movl %1,%%esp " /* set task[pid].thread.sp to esp */ "pushl %1 " /* push ebp */ "pushl %0 " /* push task[pid].thread.ip */ "ret " /* pop task[pid].thread.ip to eip */ "popl %%ebp " : : "c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/ ); } void my_process(void) { int i = 0; while(1) { i++; if(i%10000000 == 0) { printk(KERN_NOTICE "this is process %d - ",my_current_task->pid); if(my_need_sched == 1) { my_need_sched = 0; my_schedule(); } printk(KERN_NOTICE "this is process %d + ",my_current_task->pid); } } }
第一步初始化进程0

第二步另外创建3个进程PCB 其中对stack[]中的内容进行了简写

第三步通过嵌入式汇编代码启动进程0
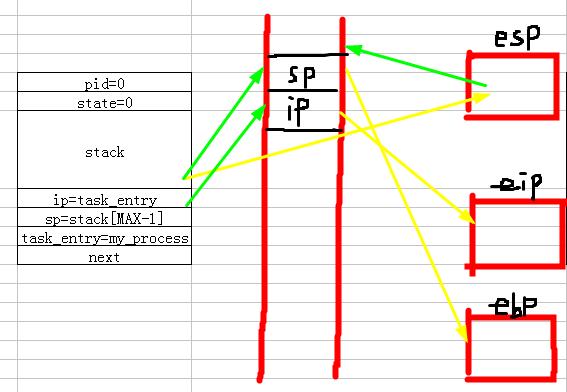
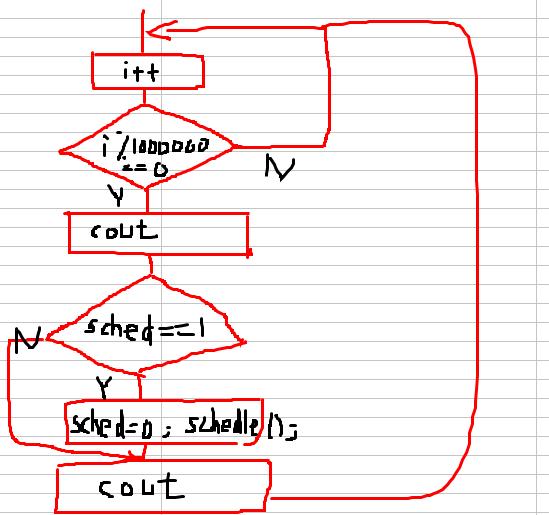
第四步执行my_process()函数
3.接下来咱们分析一下myiterrrupt.c
void my_timer_handler(void) { #if 1 if(time_count%1000 == 0 && my_need_sched != 1) { printk(KERN_NOTICE ">>>my_timer_handler here<<< "); my_need_sched = 1; } time_count ++ ; #endif return; } void my_schedule(void) { tPCB * next; tPCB * prev; if(my_current_task == NULL || my_current_task->next == NULL) { return; } printk(KERN_NOTICE ">>>my_schedule<<< "); /* schedule */ next = my_current_task->next; prev = my_current_task; if(next->state == 0)/* -1 unrunnable, 0 runnable, >0 stopped */ { /* switch to next process */ asm volatile( "pushl %%ebp " /* save ebp */ "movl %%esp,%0 " /* save esp */ "movl %2,%%esp " /* restore esp */ "movl $1f,%1 " /* save eip */ "pushl %3 " "ret " /* restore eip */ "1: " /* next process start here */ "popl %%ebp " : "=m" (prev->thread.sp),"=m" (prev->thread.ip) : "m" (next->thread.sp),"m" (next->thread.ip) ); my_current_task = next; printk(KERN_NOTICE ">>>switch %d to %d<<< ",prev->pid,next->pid); } else { next->state = 0; my_current_task = next; printk(KERN_NOTICE ">>>switch %d to %d<<< ",prev->pid,next->pid); /* switch to new process */ asm volatile( "pushl %%ebp " /* save ebp */ "movl %%esp,%0 " /* save esp */ "movl %2,%%esp " /* restore esp */ "movl %2,%%ebp " /* restore ebp */ "movl $1f,%1 " /* save eip */ "pushl %3 " "ret " /* restore eip */ : "=m" (prev->thread.sp),"=m" (prev->thread.ip) : "m" (next->thread.sp),"m" (next->thread.ip) ); } return; }
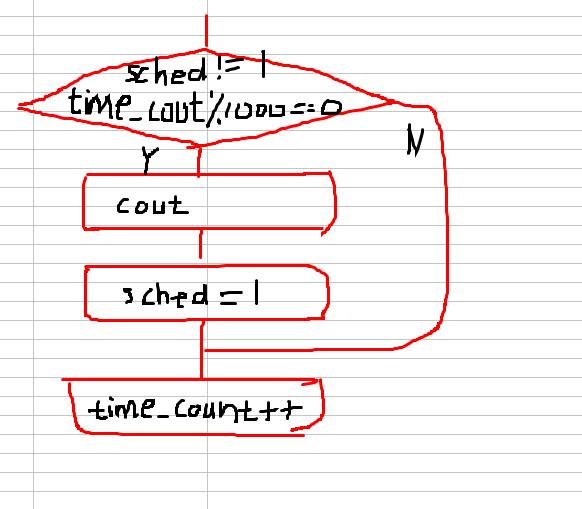
第一步分析my_timer_handler()函数
第二步分析my_schedule()函数
当next->state == 0时:
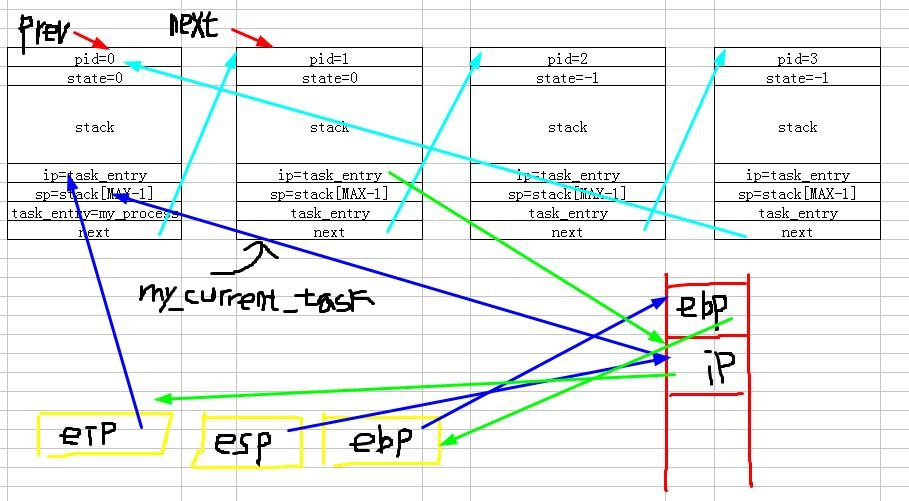
当next->state != 0时:
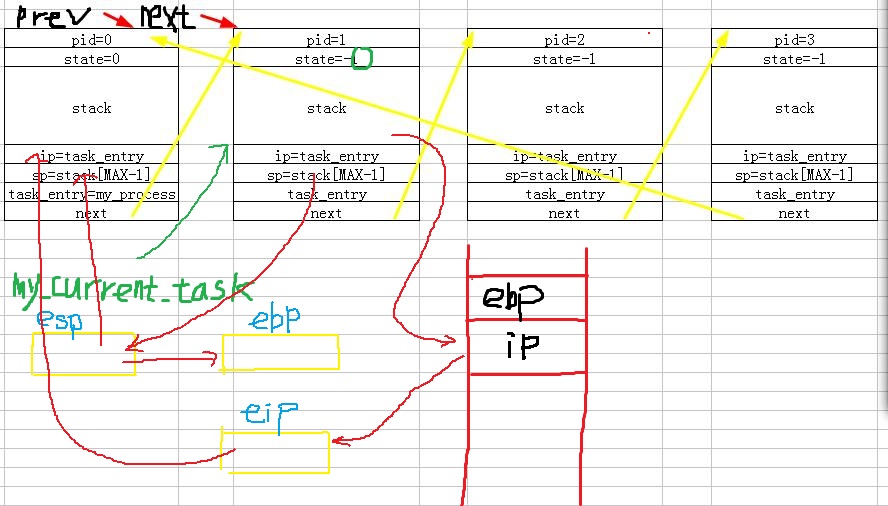
最后分析一下:
发现自己对函数堆栈理解有错误
1.其实所谓的内核堆栈 只是ESP指针指向内核中的地址
esp指向谁 谁就是堆栈 没有什么好解释的
所以可以做到多个pcb的切换
只要将esp指针指到对应的pcb的stack即可
2.关于对下面这2句话的理解也发生了错误
"movl $1f,%1 "
"1: "
这里我以为eip指向了next的pcb 然后继续下面的汇编代码 我以为还是pre当前的pcb
其实我写这篇博客理解是有偏差的
进栈出栈
这里要明白pcb在哪里 它是谁的一部分
其实在函数调用中
因此汇编代码ret前后就要一分为二来看
ret前建立堆栈
eip转移到next-pcb
ret后拆除堆栈
继续执行next-pcb的代码
理解这一点是内核栈的关键!