1 引子
在上一篇读书笔记中,我们对书本中给出的例子进行详细的分析。首先是搭出一个框架;然后填充初始化函数,在初始化函数中向OpenGL提供顶点信息(缓冲区对象)和顶点属性信息(顶点数组对象),并启用顶点数组对象;最后填充绘制函数,首先清空颜色缓存,然后调用glDrawArray来绘制基本图形。例子中使用的坐标都是二维坐标,所以画出来的图形是二维图形(这里是两个三角形),而我们知道OpenGL最主要是用来进行三维图形的渲染的,所以有必要在学习OpenGL相关API之前对三维变换做一个简要的介绍。其实这一部分应该属于红宝书中第五章的内容,这里我们将其提前了,在读书笔记(二)就拿出来介绍——这是我们三维渲染的最基本的知识点,也是最关键的知识点,理解起来也有一定的难度。本次读书笔记主要讲述平移、旋转、缩放变换的变换矩阵,投影变换将在下一篇读书笔记再做记录。本篇读书笔记主要是自己对一些数学概念的理解和记录,仅供参考,如有不同理解的,大家可以一起讨论哈!
2 点、坐标系与向量
讨论三维变换之前,得先了解点、向量和坐标系这些基本数学概念。这部分内容可能比较抽象,下面记录的是我对这些概念的一些理解。
2.1 位置的相对性
在日常生活中,我们在向别人描述一个陌生的地方的时候,通常会选择一个他熟悉的地方作为一个参考点。例如:我们向老外介绍河北的一座古城邯郸,老外知道北京,我们就会说邯郸在北京往西南走300km;如果老外知道石家庄,那我们也可以告诉他,邯郸在石家庄往南走100km。这说明,位置是一个相对的概念,要描述一个位置,首先要选择参考点;参考点的选择是任意的,所选取的参考点不同,位置的描述也就不同。
在几何中,位置用“点”这一概念来描述,即点是一个只有位置没有大小的量。描述一个点和描述一个位置是一回事,刚才已经说了位置是一个相对的概念,所以首先就要用到参考点。我们以最简单的一维数轴为例来说明描述点的位置,如下图所示:

对于数轴上同一点AA,要描述AA点的位置,先要选取任意一个参考点,如果选择的参考点是O1O1,则AA点在O1O1点右边l1l1的地方;如果选择的参考点是O2O2,则AA点在O2O2点左边l2l2的地方。通过数轴和参考点,我们就将数轴上的几何点用抽象的数字表达出来了。
2.2 坐标系与向量
从图上可以看出,数轴上的点只能沿着数轴方向进行变化,即它是一维的。如果点在一个平面上或一个空间中变化,那么数轴这一工具是无法描述的。这时就要引入二维坐标系和三维坐标系来描述点的位置。介绍坐标系之前,首先介绍一下向量的概念。
在我们还是十七八岁学习高一几何的时候,我们就已经接触到了向量——既有大小,又有方向的量,用一个有向线段来表示。说白了,向量定义了一个方向、一个长度和一个单位长度。如上图中,O1AO1A和AO2AO2就是两个向量,大小分别为l1l1和l2l2,方向为水平向右。
一个平面上,有无数这样的向量。但是关于向量,有一个非常重要的法则——使用平行四边形法则来对任何一个向量进行分解。平行四边形法则来自于物理学中力的分解与合成,后被引入数学中加以抽象来描述向量的分解与合成。所谓平行四边形法则,指的是任何一个平面向量都可以用一个不共线的两个向量表示。于是,平面中无数的向量就可以用两个不共线的向量来表示。由这两个向量及它们的公共起点构成的数学结构就是二维坐标系,用坐标系就可以描述二维平面上的任意点,当然也可以描述二维平面上的任意向量,这两个向量就是线性代数中的基向量。我们知道,在数学中,向量是位置无关的(即自由向量),只要大小相等,方向相同的两个向量就是同一个向量(这和物理学中的力不一样)。所以要描述二维空间中的点,还需要一个参考点,于是就定义了这两个向量的公共起点作为参考点——即我们熟知的坐标原点。坐标轴向量和坐标原点就构成了坐标系,可以用坐标系来描述其中的任何向量和任一点。
三维坐标系和二维坐标系是类似的,使用两次平行四边形法则,从而将任意一个三维向量表示为三个不共面的三维向量(基向量)来表示,这三个向量移到一起的公共起点定义为三维坐标系的坐标原点。二维和三维笛卡尔坐标系就是基向量垂直的二维和三维坐标系,也是应用最为广泛的坐标系,也称为平面直角坐标系和空间直角坐标系。
下面,我们来看看向量的表示方法。同样在我们懵懵懂懂的青春岁月里,我们就已经知道向量有两种表示方法:第一种是符号表示法,如a,ba,b等;另一种是坐标表示法,这里对坐标表示做较详细的说明。刚才已经说了,任意一个二维向量都可以用两个不共线的向量来表示,假设两个基向量为ii和jj,且长度为1。则对任一个向量a=xai+yaja=xai+yaj,这样,向量aa可用一个有序对(xa,ya)(xa,ya)来唯一表示,这就是向量的坐标表示。三维乃至NN维向量的坐标表示都是一样的。在这里,博主还是想强调一下,向量的坐标并不是该向量在坐标轴上的投影,只有笛卡尔坐标是向量在基向量上的投影。所以,在普通坐标系下,一个向量的坐标不是很好求,但在直角坐标系下,就变得很好求了——求投影,这也是笛卡尔坐标系应用的如此广泛的原因。下面我们来看看,什么是投影,其实高一数学中也已经接触到了,如下图所示:
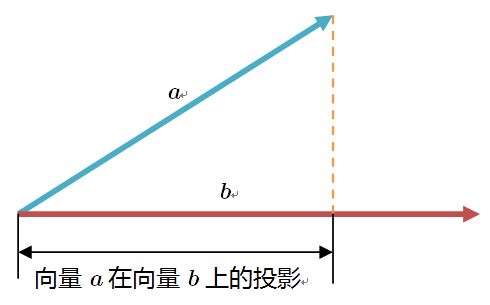
假设cc为向量aa在向量bb上的投影,那么:
所以,在二维直角坐标系中,如果二维向量aa长度为ll,该向量与xx轴和yy轴的夹角分别为αα和ββ,则我们很容易得到该向量的坐标表示为=(lcosα,lcosβ)T=(lcosα,lcosβ)T;同样地,对三维空间向量bb,其长度为LL,与xx轴、yy轴和zz轴的夹角分别为αα、ββ和γγ,则其坐标表示为b=(Lcosα,Lcosβ,Lcosγ)Tb=(Lcosα,Lcosβ,Lcosγ)T。
2.3 点的表示
刚才我们定义了坐标系——坐标原点和三个不共面的向量组成,并且三维空间中的任意向量都可以由这三个向量唯一表示,但我们没有讲点怎么由坐标系来定义。设在三维笛卡尔坐标系中,坐标原点为OO,三个基向量分别为ii,jj,kk,我们要求PP点的坐标,那么
于是,点PP可以表示为
所以,要想表示一个三维的点,可以用四维坐标来表示,例如刚才的PP可以表示为P=(x1y1z11)P=(x1y1z11),这就是齐次坐标。对顶点来说,齐次坐标才是其真正的表示方式。向量可以表示为v=(x1y1z10)v=(x1y1z10)。
3 线性变换与齐次坐标
3.1 概述
代数中的线性变换的概念很抽象,涉及到向量空间、线性映射之类的概念,在这里不做过多解释,如下想了解可以度娘或必应。给一个通俗点的解释,三维线性变换就是将点/向量的坐标值做一个运算,使其坐标值发生改变,这在几何中的反映就是几何体的形状被改变了。在计算机图形学中,线性变换一般是指平移、旋转、缩放、投影(正交投影和透视投影)以及这些基本变换的综合运算。通过刚才的描述,我们知道一下几点信息:几何中的点或向量由四个坐标值确定,而坐标值是由坐标系确定的,坐标系又是由三个不共面的向量和坐标原点构成。也就是说,对于同一点,在不同的坐标系下,描述它的坐标值是不一样的,而变换就是建立这两种不同描述之间的联系——所以在以前我们称之为坐标变换。例如:在坐标系O1−i1j1k1O1−i1j1k1坐标系下,某一点可以描述为PP点可以用四元祖(x1,y1,z1,o1)(x1,y1,z1,o1)描述,
在另一个坐标系为O2−i2j2k2O2−i2j2k2,可以用另一个有序元组描述它,设为(x2,y2,z2,o2)(x2,y2,z2,o2)
那么怎么建立(3)(3)和(2)(2)之间的联系呢?还是之前我们说的,任意一个三维向量都可以表示用三个不共面的向量表示,所以i2,j2,k2i2,j2,k2可以用i1,j1,k1i1,j1,k1线性表出:
即:
于是,我们就可以写出从(x1y1z1o1)T(x1y1z1o1)T变换到(x2y2z2o2)T(x2y2z2o2)T的变换表达式为:
其中,将
称为坐标变换矩阵。接下来主要就是讲解怎么求基本的坐标变换(仿射变换)矩阵。
3.2 缩放
缩放应该是所有线性变换中最简单的变换了。执行缩放操作,例如将一个向量缩放为原来的ss倍,相当于原点不变,xx、yy、zz三个坐标轴缩放为原来的ss倍。根据3.1介绍的,缩放操作的变换矩阵为:
3.3 平移
所谓平移,就是在坐标系中的三个坐标轴保持不变,原点沿着平移向量移动到新位置。假设平移向量为vp=(xpypzp0)vp=(xpypzp0)同样,根据可以得到,平移操作的变换矩阵为:
3.4 旋转
最后来推导最难的旋转变换矩阵。与平移、旋转矩阵的不同,旋转矩阵就不那么直观了。下面,我们来具体看一下旋转矩阵的推导,这个推导是执行三次向量的平行四边形法则进行分解得到,整个分解过程如下图所示:

三次分解由不同的颜色表示出来了,分别是红色、浅蓝色和紫色。
已知条件:ii、jj和kk是三维笛卡尔坐标系的基向量,原点为OO,旋转轴为uu,也是单位向量,向量i′i′为xx方向的基向量ii绕旋转轴uu旋转θθ后的新向量——旋转后坐标系xx轴的基向量。
我们的目的:将向量i′i′用基向量ii、jj和kk表示出来。
第一步向量分解:将i′i′分解为沿着旋转轴uu的向量OA→OA→和垂直于uu的向量OB→OB→,则:
且:
第二步向量分解:将ii分解为沿着旋转轴uu的向量OA→OA→和垂直于uu的向量OC→OC→,则
且:
第三步向量分解:建立OB→OB→与OC→OC→之间的联系,将向量OB→OB→分解为沿着OC→OC→方向的向量OD→OD→和垂直于OB→OB→的向量OE→OE→,则
根据66可得:
另外,注意到OE→OE→和OC→OC→垂直,uu是旋转轴,则uu与平面OEBDOEBD垂直,所以uu与OEOE垂直,则OE→OE→在向量uu和向量OC→OC→的叉乘向量上,假设 OF→=u×OC→OF→=u×OC→,于是:
所以现在求出kk就可以了,由叉乘定义:|OF→|=|u||OC→|sin(90)=|OC→|=|OB→||OF→|=|u||OC→|sin(90)=|OC→|=|OB→|,所以:k=sinθk=sinθ,最后得到
其余两个变换后的基向量i′i′和j′j′也可以由ii、jj和kk表示出来,最终得到齐次旋转矩阵为
4 总结
最后总结一下,在这篇博文中我们讲述了点及其相对性,接着介绍了向量的概念,由平行四边形法则引出坐标系的概念,然后介绍了点在坐标系下的表示,最后介绍了坐标变换和变换矩阵的概念,给出了三种基本变换——平移变换、旋转变换和缩放变换的变换矩阵。这些矩阵综合运用,就构成了三维空间中复杂的变换了,三维变换是三维图形绘制的基础,也是学习OpenGL时较难理解的知识点之一。