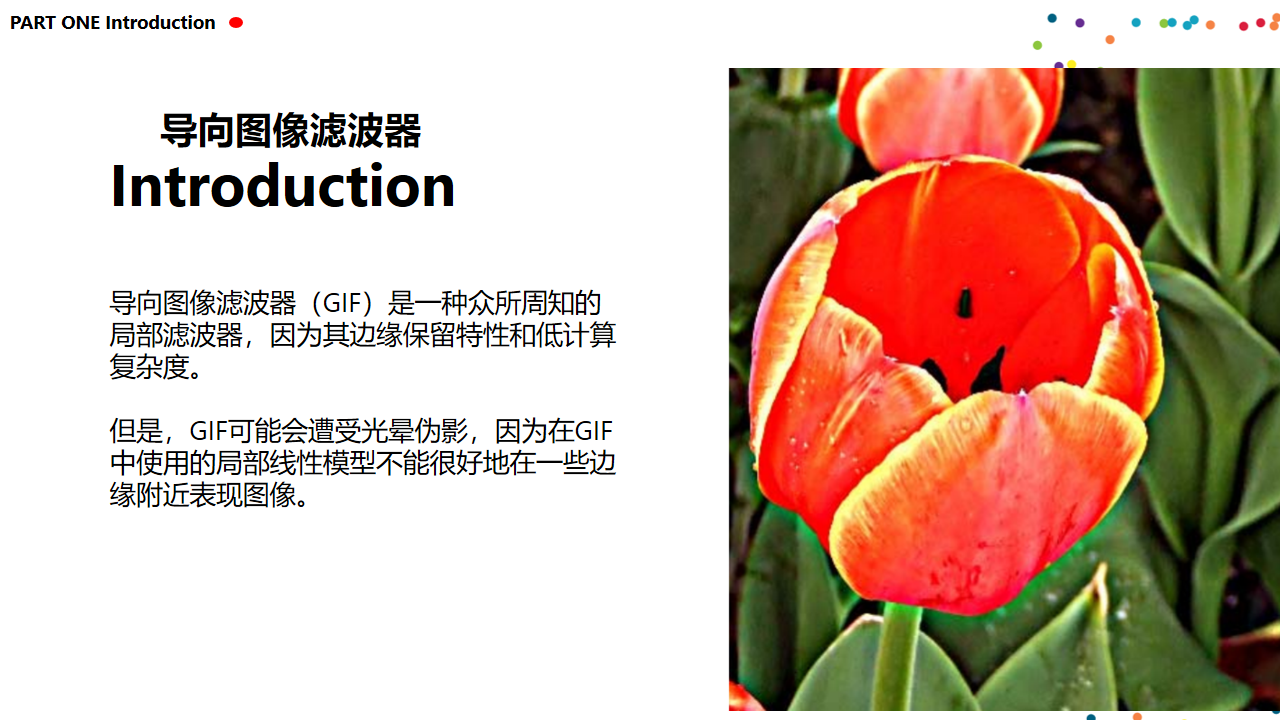
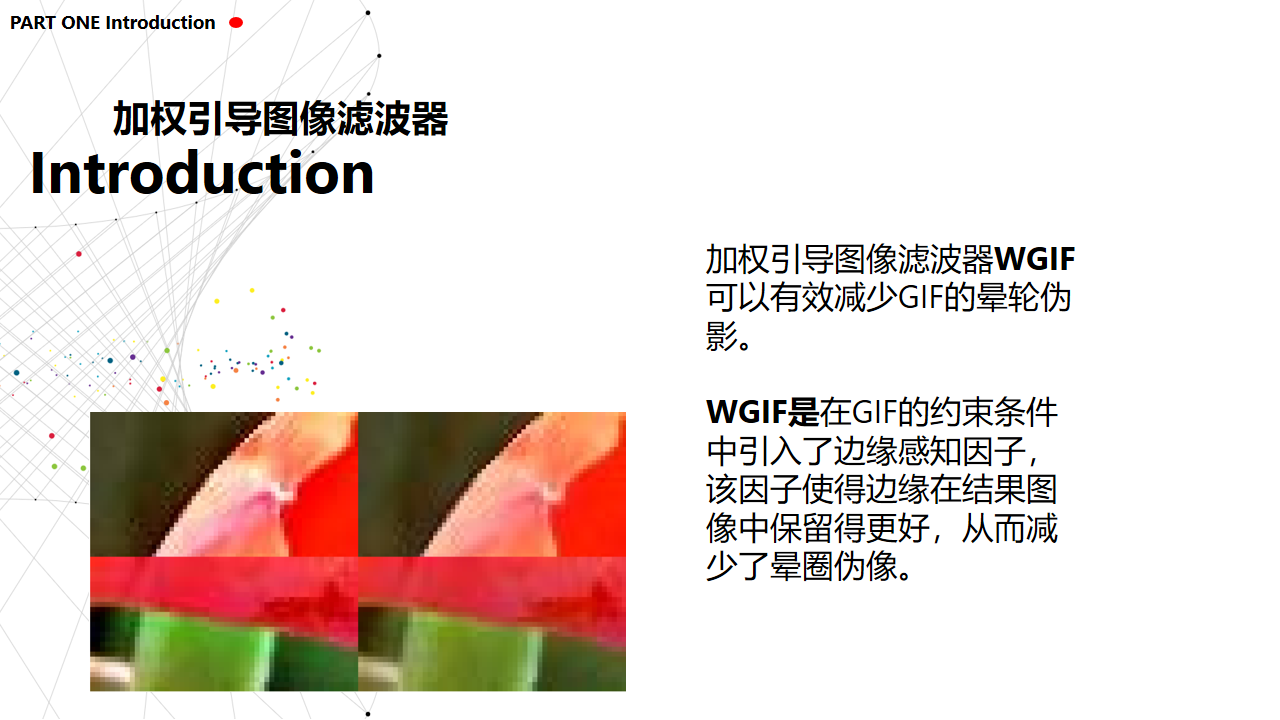
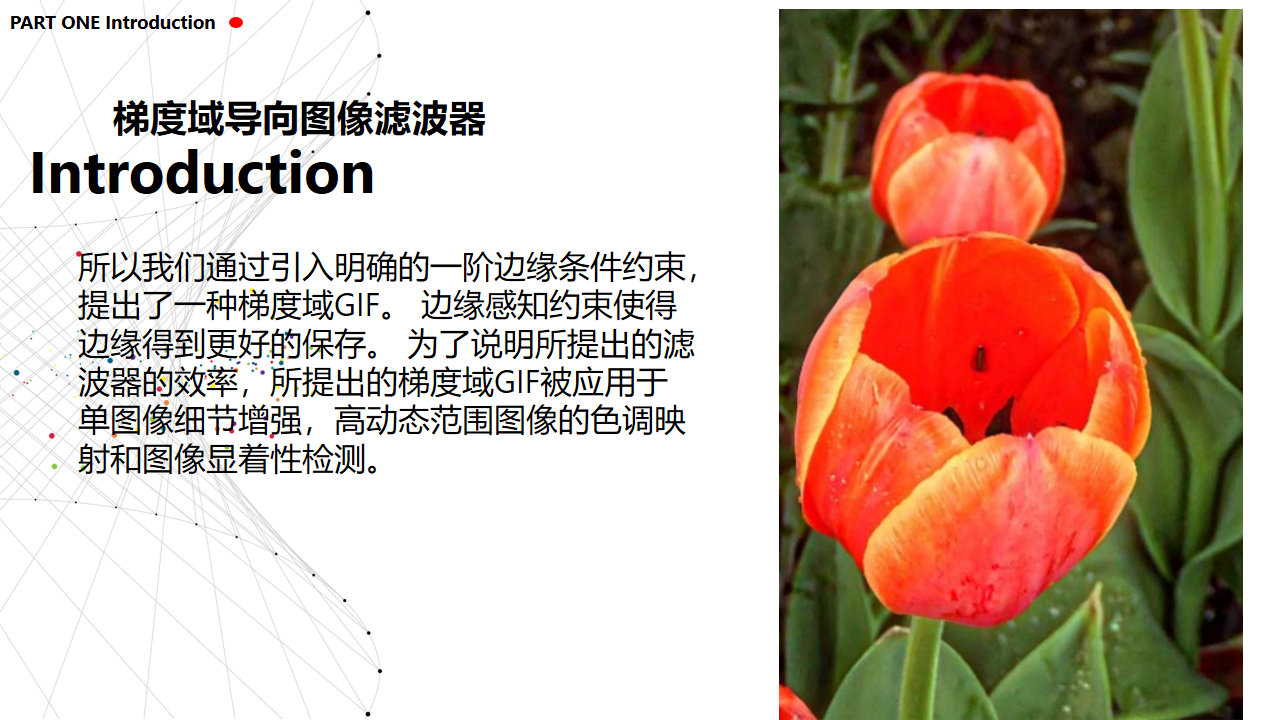
作者提出了一种新的梯度域引导图像滤波器,通过将明确的一阶边缘感知约束结合到现有的引导图像滤波器中。














matlab代码实现
转载至:https://blog.csdn.net/majinlei121/article/details/50717777
%主程序
function q = gradient_guidedfilter(I, p, eps) % GUIDEDFILTER O(1) time implementation of guided filter. % % - guidance image: I (should be a gray-scale/single channel image) % - filtering input image: p (should be a gray-scale/single channel image) % - regularization parameter: eps r=16; [hei, wid] = size(I); N = boxfilter(ones(hei, wid), r); % the size of each local patch; N=(2r+1)^2 except for boundary pixels. mean_I = boxfilter(I, r) ./ N; mean_p = boxfilter(p, r) ./ N; mean_Ip = boxfilter(I.*p, r) ./ N; cov_Ip = mean_Ip - mean_I .* mean_p; % this is the covariance of (I, p) in each local patch. mean_II = boxfilter(I.*I, r) ./ N; var_I = mean_II - mean_I .* mean_I; %weight epsilon=(0.001*(max(p(:))-min(p(:))))^2; r1=1; N1 = boxfilter(ones(hei, wid), r1); % the size of each local patch; N=(2r+1)^2 except for boundary pixels. mean_I1 = boxfilter(I, r1) ./ N1; mean_II1 = boxfilter(I.*I, r1) ./ N1; var_I1 = mean_II1 - mean_I1 .* mean_I1; chi_I=sqrt(abs(var_I1.*var_I)); weight=(chi_I+epsilon)/(mean(chi_I(:))+epsilon); gamma = (4/(mean(chi_I(:))-min(chi_I(:))))*(chi_I-mean(chi_I(:))); gamma = 1 - 1./(1 + exp(gamma)); %result a = (cov_Ip + (eps./weight).*gamma) ./ (var_I + (eps./weight)); b = mean_p - a .* mean_I; mean_a = boxfilter(a, r) ./ N; mean_b = boxfilter(b, r) ./ N; q = mean_a .* I + mean_b; end %子程序boxfilter() [cpp] view plain copy function imDst = boxfilter(imSrc, r) % BOXFILTER O(1) time box filtering using cumulative sum % % - Definition imDst(x, y)=sum(sum(imSrc(x-r:x+r,y-r:y+r))); % - Running time independent of r; % - Equivalent to the function: colfilt(imSrc, [2*r+1, 2*r+1], 'sliding', @sum); % - But much faster. [hei, wid] = size(imSrc); imDst = zeros(size(imSrc)); %cumulative sum over Y axis imCum = cumsum(imSrc, 1); %difference over Y axis imDst(1:r+1, :) = imCum(1+r:2*r+1, :); imDst(r+2:hei-r, :) = imCum(2*r+2:hei, :) - imCum(1:hei-2*r-1, :); imDst(hei-r+1:hei, :) = repmat(imCum(hei, :), [r, 1]) - imCum(hei-2*r:hei-r-1, :); %cumulative sum over X axis imCum = cumsum(imDst, 2); %difference over X axis imDst(:, 1:r+1) = imCum(:, 1+r:2*r+1); imDst(:, r+2:wid-r) = imCum(:, 2*r+2:wid) - imCum(:, 1:wid-2*r-1); imDst(:, wid-r+1:wid) = repmat(imCum(:, wid), [1, r]) - imCum(:, wid-2*r:wid-r-1); end
%运行程序
clear
I = double(imread('D:数字图像处理研究方向Filter Smoothimages ulips.png')) / 255;
% if size(I,3)==3
% I=rgb2gray(I);
% end
p = I;
r=16;
eps = 0.8^2; % try eps=0.1^2, 0.2^2, 0.4^2
q_guide(:,:,1)=guidedfilter(I(:,:,1), p(:,:,1), r, eps);
q_guide(:,:,2)=guidedfilter(I(:,:,2), p(:,:,2), r, eps);
q_guide(:,:,3)=guidedfilter(I(:,:,3), p(:,:,3), r, eps);
q(:,:,1) = gradient_guidedfilter(I(:,:,1), p(:,:,1), eps);
q(:,:,2) = gradient_guidedfilter(I(:,:,2), p(:,:,2), eps);
q(:,:,3) = gradient_guidedfilter(I(:,:,3), p(:,:,3), eps);
figure;imshow([I,q_guide,q]);title('原图,引导滤波,改进引导滤波 eps=0.8^2');