完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980
第13章 STM32H7启动过程详解
本章教程主要跟大家讲STM32H7的启动过程,这里的启动过程是指从CPU上电复位执行第1条指令开始(汇编文件)到进入C程序main()函数入口之间的部分。启动过程相对来说还是比较重要的,理解了这个过程,对于以后分析程序还是有些帮助的,要不每次看到这个启动过程都会跳过,直接去看主程序了。还有就是以后打算学习RTOS的话,对于这个过程必须有个了解,因为移植的时候涉及到中断向量表。对初学者来说,看这个可能有些吃力,不过不要紧,随着自己做过一些简单的应用之后再来看这章,应该会有很多的帮助,由于我们的V7板子是基于STM32H7XXX,所以我们这里主要针对H7系列的启动过程做一下分析,对于F1,F4系列也是大致相同的。
13.1 初学者重要提示
13.2 各个版本的启动文件介绍
13.3 启动文件分析
13.4 BOOT启动模式
13.5 总结
13.1 初学者重要提示
1、 如果觉得学习本章节吃力的话,推荐看我们早期做的入门视频教程第8章,同样适用于STM32H7。
http://www.armbbs.cn/forum.php?mod=viewthread&tid=15408 。
2、 相比F1,F4的启动方式,H7的启动方式更灵活些,只需一个boot引脚即可。但是一个引脚只能区分出两个状态,为了解决这个问题,H7专门配套了两个option bytes选项字节来解决此问题。
13.2 各个版本的启动文件介绍
这里各个版本的意思是指不同的编译器、不同的H7系列对应的启动文件。
13.2.1 不同编译器对应的启动文件
打开我们为本教程提供的工程文件,路径如下:
LibrariesCMSISDeviceSTSTM32H7xxSourceTemplates 在这个文件里面有ST官方为各个编译器提供的启动文件。
看了上面的截图,大家会问怎么没有KEIL MDK呢?其实已经被放在了文件夹arm里面,KEIL公司已经在2005年被ARM公司收购了。开发板大部分例程都是配套了MDK和IAR两个版本,这里重点给大家分析一下MDK的启动文件分析,IAR和MDK的大同小异。
13.2.2 不同H7系列对应的启动文件
先来看一下ARM文件夹里面的文件(2018-07-03,当前只有如下两个系列,后期ST会增加新的型号,相应的启动文件也会添加进来):
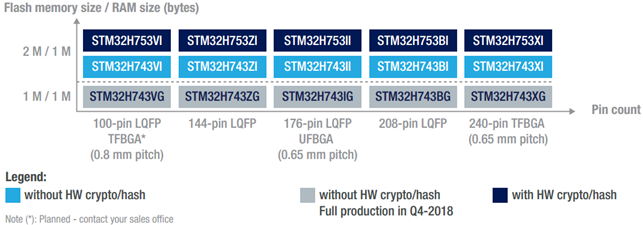
如果是H743系列,就使用startup_stm32h743xx.s文件,如果是H753系列,就使用startup_stm32h753xx文件。当前H743和753系列对应的型号如下:
我们再来打开IAR文件夹里面的文件:
多了一个linker文件夹,用于IAR配置的ICF文件:
而启动文件跟MDK里面的一样,一个是用H743系列,另一个是用于H753系列。
13.3 启动文件分析
鉴于V7开发板使用的是STM32H743XI,下面我们详细的分析一下启动文件startup_stm32h743xx.s。分析前,先掌握一个小技能,遇到不认识的指令或者关键词可以检索。
- 启动 MDK软件,在Help菜单点击 uVision Help
- 点击后弹出如下文件
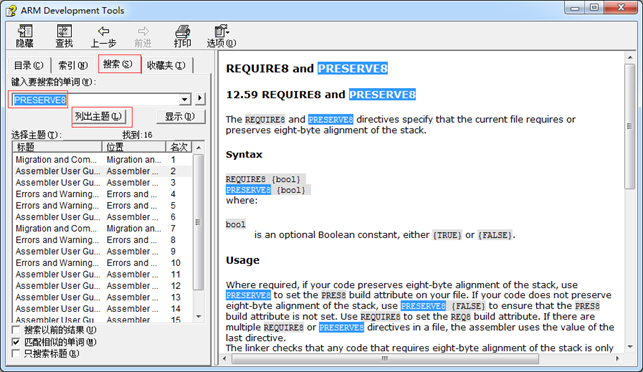
在搜索栏输入你需要查询的单词进行查询,然后点击“列出主题”按钮,会将相关的知识点都罗列出来。此功能非常实用,建议熟练掌握。
下面先来看启动文件前面的介绍 (固件库版本:V1.2.0)
;******************** (C) COPYRIGHT 2017 STMicroelectronics ******************** ;* File Name : startup_stm32h743xx.s ;* @author MCD Application Team ;* version : V1.2.0 ;* Date : 29-December-2017 ;* Description : STM32H7xx devices vector table for MDK-ARM toolchain. ;* This module performs: ;* - Set the initial SP ;* - Set the initial PC == Reset_Handler ;* - Set the vector table entries with the exceptions ISR address ;* - Branches to __main in the C library (which eventually ;* calls main()). ;* After Reset the Cortex-M processor is in Thread mode, ;* priority is Privileged, and the Stack is set to Main. ;* <<< Use Configuration Wizard in Context Menu >>> ;******************************************************************************* ; ; Licensed under MCD-ST Liberty SW License Agreement V2, (the "License"); ; You may not use this file except in compliance with the License. ; You may obtain a copy of the License at: ; ; http://www.st.com/software_license_agreement_liberty_v2 ; ; Unless required by applicable law or agreed to in writing, software ; distributed under the License is distributed on an "AS IS" BASIS, ; WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. ; See the License for the specific language governing permissions and ; limitations under the License. ; ;*******************************************************************************
启动文件是后缀为.s的汇编语言文本文件,每行前面的分号表示此行是注释行。
启动文件主要完成如下工作,即程序执行过程:
- 设置堆栈指针SP = __initial_sp。
- 设置PC指针 = Reset_Handler。
- 设置中断向量表。
- 配置系统时钟。
- 配置外部SRAM/SDRAM用于程序变量等数据存储(这是可选的)。
- 跳转到C库中的 __main ,最终会调用用户程序的main()函数。
Cortex-M内核处理器复位后,处于线程模式,指令权限是特权级别(最高级别),堆栈设置为使用主堆栈MSP。
13.3.1 复位序列
硬件复位之后,CPU 内的时序逻辑电路首先完成如下两个工作(程序代码下载到内部flash为例,flash首地址0x0800 0000)
- 将0x08000000位置存放的堆栈栈顶地址存放到SP中(MSP)。
- 将0x08000004 位置存放的向量地址装入 PC 程序计数器。
CPU 从 PC 寄存器指向的物理地址取出第 1 条指令开始执行程序,也就是开始执行复位中断服务程序 Reset_Handler。

复位中断服务程序会调用SystemInit()函数来配置系统时钟、配置FMC总线上的外部SRAM/SDRAM,然后跳转到C 库中__main 函数。由C库中的__main 函数完成用户程序的初始化工作(比如:变量赋初值等),最后由__main 函数调用用户写的 main()函数开始执行 C 程序。
13.3.2 代码分析
- 第1部分代码分析
下面的代码实现开辟栈(stack)空间,用于局部变量、函数调用、函数的参数等。
1. ; Amount of memory (in bytes) allocated for Stack 2. ; Tailor this value to your application needs 3. ; <h> Stack Configuration 4. ; <o> Stack Size (in Bytes) <0x0-0xFFFFFFFF:8> 5. ; </h> 6. 7. Stack_Size EQU 0x00000400 8. 9. AREA STACK, NOINIT, READWRITE, ALIGN=3 10. Stack_Mem SPACE Stack_Size 11. __initial_sp
第7行:EQU 是表示宏定义的伪指令,类似于 C 语言中的#define。伪指令的意思是指这个“指令”并不会生成二进制程序代码,也不会引起变量空间分配。
0x00000400 表示栈大小,注意这里是以字节为单位。
第9行:开辟一段数据空间可读可写,段名 STACK,按照 8 字节对齐。ARER 伪指令表示下面将开始定义一个代码段或者数据段。此处是定义数据段。ARER 后面的关键字表示这个段的属性。
STACK :表示这个段的名字,可以任意命名。
NOINIT:表示此数据段不需要填入初始数据。
READWRITE:表示此段可读可写。
ALIGN=3 :表示首地址按照 2 的 3 次方对齐,也就是按照 8 字节对齐(地址对8求余数等于0)。
第10行:SPACE 这行指令告诉汇编器给 STACK 段分配 0x00000400 字节的连续内存空间。
第11行: __initial_sp 紧接着 SPACE 语句放置,表示了栈顶地址。__initial_sp 只是一个标号,标号主要用于表示一片内存空间的某个位置,等价于 C 语言中的“地址”概念。地址仅仅表示存储空间的一个位置,从 C 语言的角度来看,变量的地址,数组的地址或是函数的入口地址在本质上并无区别。
- 第2部分代码分析
下面的代码实现开辟堆(heap)空间,主要用于动态内存分配,也就是说用 malloc,calloc, realloc等函数分配的变量空间是在堆上。
1. ; <h> Heap Configuration 2. ; <o> Heap Size (in Bytes) <0x0-0xFFFFFFFF:8> 3. ; </h> 4. 5. Heap_Size EQU 0x00000200 6. 7. AREA HEAP, NOINIT, READWRITE, ALIGN=3 8. __heap_base 9. Heap_Mem SPACE Heap_Size 10. __heap_limit
这几行语句和上面第1部分代码类似。分配一片连续的内存空间给名字叫 HEAP 的段,也就是分配堆空间。堆的大小为 0x00000200。
__heap_base 表示堆的开始地址。
__heap_limit 表示堆的结束地址。
- 第3部分代码分析
1. PRESERVE8 2. THUMB 3. 4. 5. ; Vector Table Mapped to Address 0 at Reset 6. AREA RESET, DATA, READONLY 7. EXPORT __Vectors 8. EXPORT __Vectors_End 9. EXPORT __Vectors_Size
第1行:PRESERVE8 指定当前文件保持堆栈八字节对齐。
第2行:THUMB表示后面的指令是THUMB指令集 ,CM7采用的是THUMB - 2指令集。
第6行:AREA定义一块代码段,只读,段名字是 RESET。READONLY 表示只读,缺省就表示代码段了。
第7-9行:3 行EXPORT语句将 3 个标号申明为可被外部引用, 主要提供给链接器用于连接库文件或其他文件。
- 第4部分代码分析
1. __Vectors DCD __initial_sp ; Top of Stack 2. DCD Reset_Handler ; Reset Handler 3. DCD NMI_Handler ; NMI Handler 4. DCD HardFault_Handler ; Hard Fault Handler 5. 6. 中间部分省略未写 7. 8. DCD 0 ; Reserved 9. DCD WAKEUP_PIN_IRQHandler ; Interrupt for all 6 wake-up pins 10. 11. 12. __Vectors_End 13. 14. __Vectors_Size EQU __Vectors_End - __Vectors
上面的这段代码是建立中断向量表,中断向量表定位在代码段的最前面。具体的物理地址由链接器的配置参数(IROM1 的地址)决定。如果程序在 Flash 运行,则中断向量表的起始地址是 0x08000000。
以MDK为例,就是如下配置选项:
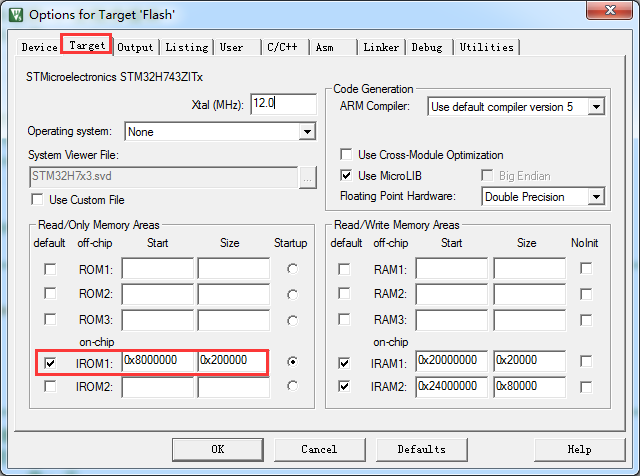
DCD 表示分配 1 个 4 字节的空间。每行 DCD 都会生成一个 4 字节的二进制代码。中断向量表存放的实际上是中断服务程序的入口地址。当异常(也即是中断事件)发生时,CPU 的中断系统会将相应的入口地址赋值给 PC 程序计数器,之后就开始执行中断服务程序。
- 第5部分代码分析
1. AREA |.text|, CODE, READONLY 2. 3. ; Reset handler 4. Reset_Handler PROC 5. EXPORT Reset_Handler [WEAK] 6. IMPORT SystemInit 7. IMPORT __main 8. 9. LDR R0, =SystemInit 10. BLX R0 11. LDR R0, =__main 12. BX R0 13. ENDP
第1行:AREA 定义一块代码段,只读,段名字是 .text 。READONLY 表示只读。
第4行:利用 PROC、ENDP 这一对伪指令把程序段分为若干个过程,使程序的结构加清晰。
第5行:WEAK 声明其他的同名标号优先于该标号被引用,就是说如果外面声明了的话会调用外面的。 这个声明很重要,它让我们可以在C文件中任意地方放置中断服务程序,只要保证C函数的名字和向量表中的名字一致即可。
第6行:IMPORT:伪指令用于通知编译器要使用的标号在其他的源文件中定义。但要在当前源文件中引用,而且无论当前源文件是否引用该标号,该标号均会被加入到当前源文件的符号表中。
第9行:SystemInit 函数在文件system_stm32h7xx.c 里面,主要实现RCC相关寄存器复位和中断向量表位置设置。
第11行:__main 标号表示C/C++标准实时库函数里的一个初始化子程序__main 的入口地址。该程序的一个主要作用是初始化堆栈(跳转__user_initial_stackheap 标号进行初始化堆栈的,下面会讲到这个标号),并初始化映像文件,最后跳转到 C 程序中的 main函数。这就解释了为何所有的 C 程序必须有一个 main 函数作为程序的起点。因为这是由 C/C++标准实时库所规,并且不能更改。
- 第6部分代码分析
代码如下:
1. ; Dummy Exception Handlers (infinite loops which can be modified) 2. 3. NMI_Handler PROC 4. EXPORT NMI_Handler [WEAK] 5. B . 6. ENDP 7. HardFault_Handler 8. PROC 9. EXPORT HardFault_Handler [WEAK] 10. B . 11. ENDP 12. 13. 中间部分省略未写 14. Default_Handler PROC 15. 16. EXPORT WWDG_IRQHandler [WEAK] 17. EXPORT PVD_AVD_IRQHandler [WEAK] 18. EXPORT TAMP_STAMP_IRQHandler [WEAK] 19. 中间部分省略未写 20. SAI4_IRQHandler 21. WAKEUP_PIN_IRQHandler 22. 23. B . 24. 25. ENDP 26. 27. ALIGN
第5行:死循环,用户可以在此实现自己的中断服务程序。不过很少在这里实现中断服务程序,一般多是在其它的C文件里面重新写一个同样名字的中断服务程序,因为这里是WEEK弱定义的。如果没有在其它文件中写中断服务器程序,且使能了此中断,进入到这里后,会让程序卡在这个地方。
第14行:缺省中断服务程序(开始)
第23行:死循环,如果用户使能中断服务程序,而没有在C文件里面写中断服务程序的话,都会进入到这里。比如在程序里面使能了串口1中断,而没有写中断服务程序USART1_IRQHandle,那么串口中断来了,会进入到这个死循环。
第25行:缺省中断服务程序(结束)。
- 第7部分代码分析
启动代码的最后一部分:
1. ;******************************************************************************* 2. ; User Stack and Heap initialization 3. ;******************************************************************************* 4. IF :DEF:__MICROLIB 5. 6. EXPORT __initial_sp 7. EXPORT __heap_base 8. EXPORT __heap_limit 9. 10. ELSE 11. 12. IMPORT __use_two_region_memory 13. EXPORT __user_initial_stackheap 14. 15. __user_initial_stackheap 16. 17. LDR R0, = Heap_Mem 18. LDR R1, =(Stack_Mem + Stack_Size) 19. LDR R2, = (Heap_Mem + Heap_Size) 20. LDR R3, = Stack_Mem 21. BX LR 22. 23. ALIGN 24. 25. ENDIF 26. 27. END
第4行:简单的汇编语言实现IF…….ELSE…………语句。如果定义了MICROLIB,那么程序是不会执行ELSE分支的代码。__MICROLIB可能大家并不陌生,就在MDK的Target Option里面设置。

第5行:__user_initial_stackheap将由__main函数进行调用。
- MicroLib
MicroLib是MDK里面带的微库,针对嵌入式应用,MicroLIB做了深度优化,比使用C标准库所需的RAM和FLASH空间都大大减小比如调用:
<math.h>,<stdlib.h>,<stdio.h>,<string.h>
更多相关知识可以地址:http://www.keil.com/arm/microlib.asp。另外注意microlib只有库,没有源文件。下图是标准库和微库生成代码的比较。

13.4 BOOT启动模式
相比F1,F4的启动方式,H7的启动方式更灵活些,只需一个boot引脚即可。但是一个引脚只能区分出两个状态,为了解决这个问题,H7专门配套了两个option bytes选项字节配置,如此以来就可以方便设置各种存储器地址了。

BOOT_ADD0和BOOT_ADD1对应32位地址到高16位,这点要特别注意。通过这两个选项字节,所有0x0000 0000到0x3FFF 0000的存储器地址都可以设置,包括:
- 所有Flash地址空间。
- 所有RAM地址空间,ITCM,DTCM和SRAM。
设置了选项字节后,掉电不会丢失,下次上电或者复位后,会根据BOOT引脚状态从BOOT_ADD0,或BOOT_ADD1所设置的地址进行启动。
使用BOOT功能,注意以下几个问题:
- 如果用户不慎,设置的地址范围不在有效的存储器地址,那么BOOT = 0时,会从Flash首地址0x0800 0000启动,BOOT = 1时,会从ITCM首地址0x0000 0000启动。
- 如果用户使能了Flash Level 2保护,那么只能从Flash地址空间进行启动。
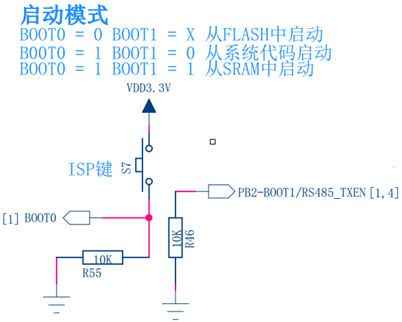
- F1,F4的启动方式
作为对比,这里补充F1,F4的启动方式,由BOOT0和BOOT1引脚共同决定。
13.5 总结
本章节讲解的启动过程分析还是比较重要的,忘初学者务必掌握。