完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980
第84章 STM32H7的SPI 总线应用之SPI Flash的MDK下载算法制作
本章节为大家讲解MDK下载算法制作方法。
84.1 初学者重要提示
84.2 MDK下载算法基础知识
84.3 创建MDK下载算法通用流程
84.4 SPI Flash的MDK下载算法制作
84.5 SPI Flash的MDK下载算法使用方法
84.6 实验例程说明
84.7 总结
84.1 初学者重要提示
- SPI Flash的相关知识点可以看第78章和79章。
- SPI Flash下载算法文件直接采用HAL库制作,方便大家自己修改。
84.2 MDK下载算法基础知识
Flash编程算法是一种用于擦除应用程序或将应用程序下载到Flash的程序代码。MDK本身支持的各种器件都自带下载算法,存放在MDK各种器件的软件包里面,以STM32H7为例,算法存放在KeilSTM32H7xx_DFP2.6.0CMSISFlash(软件包版本不同,数值2.6.0不同),但不支持的需要我们自己制作,本章教程为此而生。
84.2.1 程序能够通过下载算法下载到芯片的核心思想
认识到这点很重要:通过MDK创建一批与地址信息无关的函数,实现的功能主要有初始化,擦除,编程,读取,校验等,然后MDK调试下载阶段,会将算法文件加载到芯片的内部RAM里面(加载地址可以通过MDK设置),然后MDK通过与这个算法文件的交互,实现程序下载,调试阶段数据读取等操作。
84.2.2 算法程序中擦除操作执行流程
擦除操作大致流程:
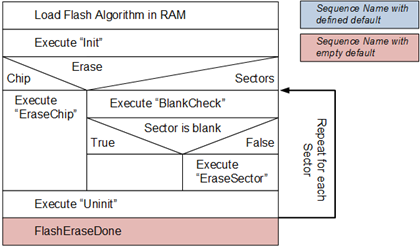
- 加载算法到芯片RAM。
- 执行初始化函数Init。
- 执行擦除操作,根据用户的MDK配置,这里可以选择整个芯片擦除或者扇区擦除。
- 执行Uinit函数。
- 操作完毕。
84.2.3 算法程序中编程操作执行流程
编程操作大致流程:
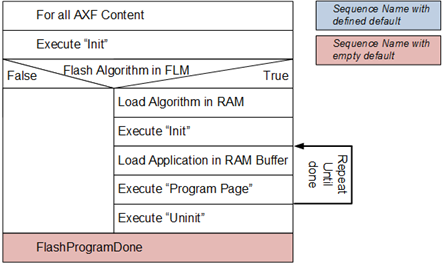
- 针对MDK生成的axf可执行文件做Init初始化,这个axf文件是指的大家自己创建应用程序生成的。
- 查看Flash算法是否在FLM文件。如果没有在,操作失败。如果在:
- 加载算法到RAM。
- 执行Init函数。
- 加载用户到RAM缓冲。
- 执行Program Page页编程函数。
- 执行Uninit函数。
- 操作完毕。
84.2.4 算法程序中校验操作执行流程
校验操作大致流程:
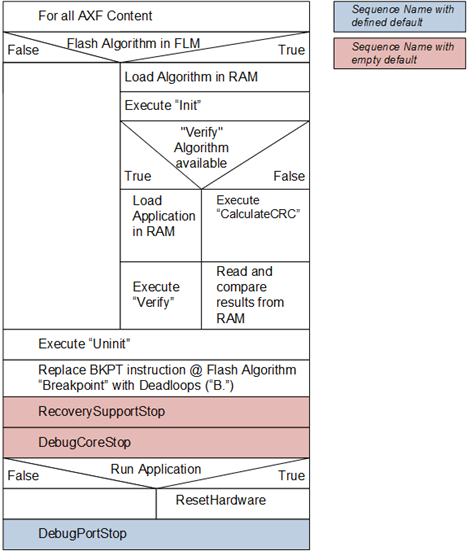
- 校验要用到MDK生成的axf可执行文件。校验就是axf文件中下载到芯片的程序和实际下载的程序读出来做比较。
- 查看Flash算法是否在FLM文件。如果没有在,操作失败。如果在:
- 加载算法到RAM。
- 执行Init函数。
- 查看校验算法是否存在
- 如果有,加载应用程序到RAM并执行校验。
- 如果没有,计算CRC,将芯片中读取出来的数据和RAM中加载应用计算输出的CRC值做比较。
- 执行Uninit函数。
- 替换BKPT(BreakPoint断点指令)为 B. 死循环指令。
- 执行RecoverySupportStop,恢复支持停止。
- 执行DebugCoreStop,调试内核停止。
- 运行应用:
- 执行失败。
- 执行成功,再执行硬件复位。
- 操作完毕,停止调试端口。
84.3 创建MDK下载算法通用流程
下面是MDK给的一种大致操作流程,不限制必须采用这种方法,自己创建也可以的。
84.3.1 第1步,使用MDK提供好的程序模板
位于路径:KeilARMPackARMCMSISversionDevice\_Template_Flash。
效果如下:
84.3.2 第2步,修改工程名
MDK提供的工程模板原始名字是NewDevice.uvprojx,大家可以根据自己的需要做修改。比如修改为MyDevice.uvprojx。
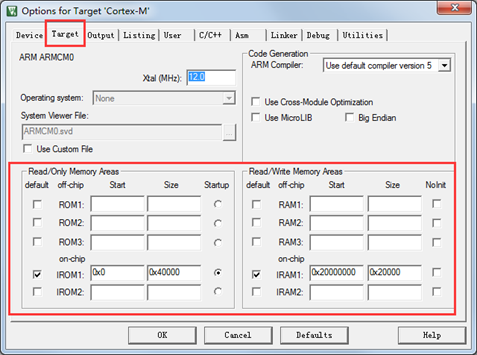
84.3.3 第3步,修改使用的器件
在MDK的Option选项里面设置使用的器件。

84.3.4 第4步,修改输出算法文件的名字
这个名字是方便用户查看的,比如设置为stm32h7,那么输出的算法文件就是stm32h7.flm。
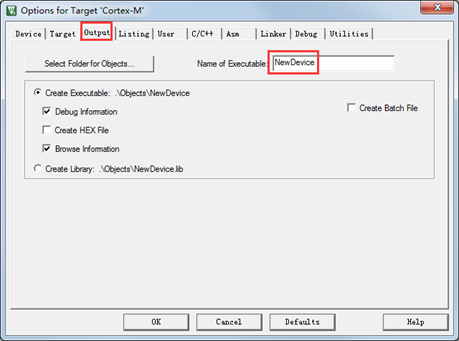
注:MDK这里设置的名字与下面位置识别出来的算法名无关:
这个名字是在FlashDev.c里面定义的。
84.3.5 第5步,修改编程算法文件FlashPrg.c
模板工程里面仅提供了接口函数,内容需要用户自己填。
/* Mandatory Flash Programming Functions (Called by FlashOS): int Init (unsigned long adr, // Initialize Flash unsigned long clk, unsigned long fnc); int UnInit (unsigned long fnc); // De-initialize Flash int EraseSector (unsigned long adr); // Erase Sector Function int ProgramPage (unsigned long adr, // Program Page Function unsigned long sz, unsigned char *buf); Optional Flash Programming Functions (Called by FlashOS): int BlankCheck (unsigned long adr, // Blank Check unsigned long sz, unsigned char pat); int EraseChip (void); // Erase complete Device unsigned long Verify (unsigned long adr, // Verify Function unsigned long sz, unsigned char *buf); - BlanckCheck is necessary if Flash space is not mapped into CPU memory space - Verify is necessary if Flash space is not mapped into CPU memory space - if EraseChip is not provided than EraseSector for all sectors is called */ /* * Initialize Flash Programming Functions * Parameter: adr: Device Base Address * clk: Clock Frequency (Hz) * fnc: Function Code (1 - Erase, 2 - Program, 3 - Verify) * Return Value: 0 - OK, 1 - Failed */ int Init (unsigned long adr, unsigned long clk, unsigned long fnc) { /* Add your Code */ return (0); // Finished without Errors } /* * De-Initialize Flash Programming Functions * Parameter: fnc: Function Code (1 - Erase, 2 - Program, 3 - Verify) * Return Value: 0 - OK, 1 - Failed */ int UnInit (unsigned long fnc) { /* Add your Code */ return (0); // Finished without Errors } /* * Erase complete Flash Memory * Return Value: 0 - OK, 1 - Failed */ int EraseChip (void) { /* Add your Code */ return (0); // Finished without Errors } /* * Erase Sector in Flash Memory * Parameter: adr: Sector Address * Return Value: 0 - OK, 1 - Failed */ int EraseSector (unsigned long adr) { /* Add your Code */ return (0); // Finished without Errors } /* * Program Page in Flash Memory * Parameter: adr: Page Start Address * sz: Page Size * buf: Page Data * Return Value: 0 - OK, 1 - Failed */ int ProgramPage (unsigned long adr, unsigned long sz, unsigned char *buf) { /* Add your Code */ return (0); // Finished without Errors }
84.3.6 第6步,修改配置文件FlashDev.c
模板工程里面提供简单的配置说明:
struct FlashDevice const FlashDevice = { FLASH_DRV_VERS, // Driver Version, do not modify! "New Device 256kB Flash", // Device Name ONCHIP, // Device Type 0x00000000, // Device Start Address 0x00040000, // Device Size in Bytes (256kB) 1024, // Programming Page Size 0, // Reserved, must be 0 0xFF, // Initial Content of Erased Memory 100, // Program Page Timeout 100 mSec 3000, // Erase Sector Timeout 3000 mSec // Specify Size and Address of Sectors 0x002000, 0x000000, // Sector Size 8kB (8 Sectors) 0x010000, 0x010000, // Sector Size 64kB (2 Sectors) 0x002000, 0x030000, // Sector Size 8kB (8 Sectors) SECTOR_END };
注:名字New Device 256kB Flash就是我们第4步所说的。MDK的Option选项里面会识别出这个名字。
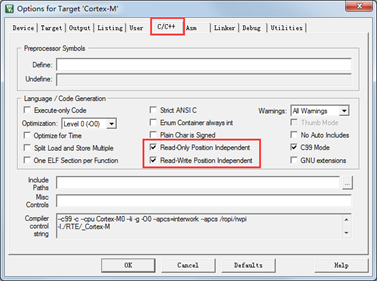
84.3.7 第7步,保证生成的算法文件中RO和RW段的独立性,即与地址无关
C和汇编的配置都勾选上:
汇编:
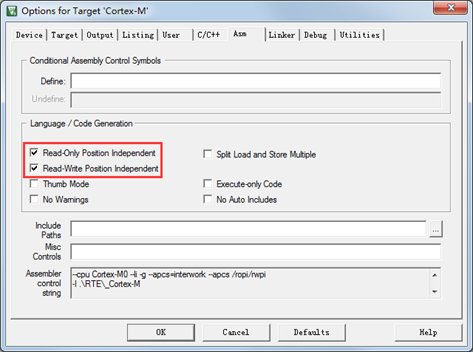
如果程序的所有只读段都与位置无关,则该程序为只读位置无关(ROPI, Read-only position independence)。ROPI段通常是位置无关代码(PIC,position-independent code),但可以是只读数据,也可以是PIC和只读数据的组合。选择“ ROPI”选项,可以避免用户不得不将代码加载到内存中的特定位置。这对于以下例程特别有用:
(1)加载以响应运行事件。
(2)在不同情况下使用其他例程的不同组合加载到内存中。
(3)在执行期间映射到不同的地址。
使用Read-Write position independence同理,表示的可读可写数据段。
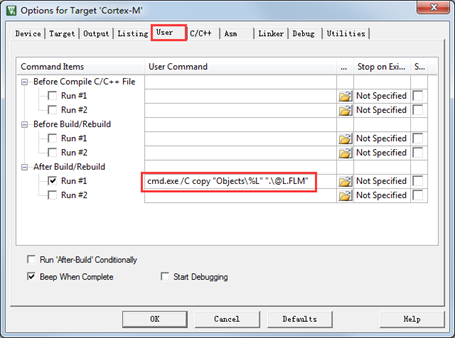
84.3.8 第8步,将程序可执行文件axf修改为flm格式
通过下面的命令就可以将生成的axf可执行文件修改为flm。
84.3.9 第9步,分散加载设置
我们这里的分散加载文件直接使用MDK模板工程里提供好的即可,无需任何修改。
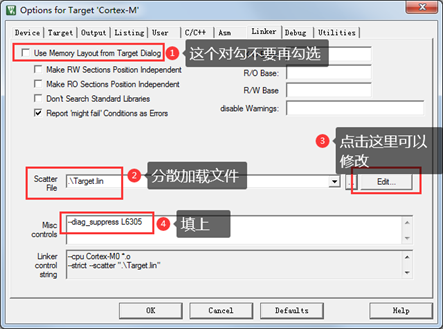
分散加载文件中的内容如下:
; Linker Control File (scatter-loading) ; PRG 0 PI ; Programming Functions { PrgCode +0 ; Code { * (+RO) } PrgData +0 ; Data { * (+RW,+ZI) } } DSCR +0 ; Device Description { DevDscr +0 { FlashDev.o } }
--diag_suppress L6305用于屏蔽L6503类型警告信息。
特别注意,设置了分散加载后,此处的配置就不再起作用了:
84.4 SPI Flash的MDK下载算法制作
下面将QSPI Flash算法制作过程中的几个关键点为大家做个说明。
84.4.1 第1步,制作前重要提示
这两点非常重要:
- 程序里面不要开启任何中断,全部查询方式。
- HAL库里面各种时间基准相关的API全部处理掉。简单省事些,我们这里是直接注释,采用死等即可。无需做超时等待,因为超时后,已经意味着操作失败了,跟死等没有区别。
84.4.2 第2步,准备一个工程模板
推荐大家直接使用我们本章工程准备好的模板即可,如果大家自己制作,注意一点,请使用当前最新的HAL库。

84.4.3 第3步,修改HAL库
这一步比较重要,主要修改了以下三个文件:

主要是修改了HAL库时间基准相关的几个API,并注释掉了一批无关的API。具体修改内容,大家可以找个比较软件,对比修改后的这个文件和CubeH7软件包V1.8.0(软件包里面的HAL库版本是V1.9.0)的差异即可。
84.4.4 第4步,时钟初始化
我们已经用不到滴答定时器了,直接在bsp.c文件里面对滴答初始化函数做重定向:
/* ********************************************************************************************************* * 函 数 名: HAL_InitTick * 功能说明: 重定向,不使用 * 形 参: TickPriority * 返 回 值: 无 ********************************************************************************************************* */ HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority) { return HAL_OK; }
然后就是HSE外置晶振的配置,大家根据自己的板子实际外挂晶振大小,修改stm32h7xx_hal_conf.h文件中HSE_VALUE大小,实际晶振多大,这里就修改为多大:
#if !defined (HSE_VALUE) #define HSE_VALUE ((uint32_t)25000000) /*!< Value of the External oscillator in Hz */ #endif /* HSE_VALUE */
最后修改PLL:
/* ********************************************************************************************************* * 函 数 名: SystemClock_Config * 功能说明: 初始化系统时钟 * System Clock source = PLL (HSE) * SYSCLK(Hz) = 400000000 (CPU Clock) * HCLK(Hz) = 200000000 (AXI and AHBs Clock) * AHB Prescaler = 2 * D1 APB3 Prescaler = 2 (APB3 Clock 100MHz) * D2 APB1 Prescaler = 2 (APB1 Clock 100MHz) * D2 APB2 Prescaler = 2 (APB2 Clock 100MHz) * D3 APB4 Prescaler = 2 (APB4 Clock 100MHz) * HSE Frequency(Hz) = 25000000 * PLL_M = 5 * PLL_N = 160 * PLL_P = 2 * PLL_Q = 4 * PLL_R = 2 * VDD(V) = 3.3 * Flash Latency(WS) = 4 * 形 参: 无 * 返 回 值: 1 表示失败,0 表示成功 ********************************************************************************************************* */ int SystemClock_Config(void) { RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; RCC_OscInitTypeDef RCC_OscInitStruct = {0}; HAL_StatusTypeDef ret = HAL_OK; /* 锁住SCU(Supply configuration update) */ MODIFY_REG(PWR->CR3, PWR_CR3_SCUEN, 0); /* 1、芯片内部的LDO稳压器输出的电压范围,可选VOS1,VOS2和VOS3,不同范围对应不同的Flash读速度, 详情看参考手册的Table 12的表格。 2、这里选择使用VOS1,电压范围1.15V - 1.26V。 */ __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1); while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {} /* 使能HSE,并选择HSE作为PLL时钟源 */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSIState = RCC_HSI_OFF; RCC_OscInitStruct.CSIState = RCC_CSI_OFF; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLM = 5; RCC_OscInitStruct.PLL.PLLN = 160; RCC_OscInitStruct.PLL.PLLP = 2; RCC_OscInitStruct.PLL.PLLR = 2; RCC_OscInitStruct.PLL.PLLQ = 4; RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE; RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_2; ret = HAL_RCC_OscConfig(&RCC_OscInitStruct); if(ret != HAL_OK) { return 1; } /* 选择PLL的输出作为系统时钟 配置RCC_CLOCKTYPE_SYSCLK系统时钟 配置RCC_CLOCKTYPE_HCLK 时钟,对应AHB1,AHB2,AHB3和AHB4总线 配置RCC_CLOCKTYPE_PCLK1时钟,对应APB1总线 配置RCC_CLOCKTYPE_PCLK2时钟,对应APB2总线 配置RCC_CLOCKTYPE_D1PCLK1时钟,对应APB3总线 配置RCC_CLOCKTYPE_D3PCLK1时钟,对应APB4总线 */ RCC_ClkInitStruct.ClockType = (RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_D1PCLK1 | RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2 | RCC_CLOCKTYPE_D3PCLK1); RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2; RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2; RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2; /* 此函数会更新SystemCoreClock,并重新配置HAL_InitTick */ ret = HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4); if(ret != HAL_OK) { return 1; } /* 使用IO的高速模式,要使能IO补偿,即调用下面三个函数 (1)使能CSI clock (2)使能SYSCFG clock (3)使能I/O补偿单元, 设置SYSCFG_CCCSR寄存器的bit0 */ __HAL_RCC_CSI_ENABLE() ; __HAL_RCC_SYSCFG_CLK_ENABLE() ; HAL_EnableCompensationCell(); __HAL_RCC_D2SRAM1_CLK_ENABLE(); __HAL_RCC_D2SRAM2_CLK_ENABLE(); __HAL_RCC_D2SRAM3_CLK_ENABLE(); return 0; }
84.4.5 第5步,配置文件FlashDev.c的实现
配置如下:
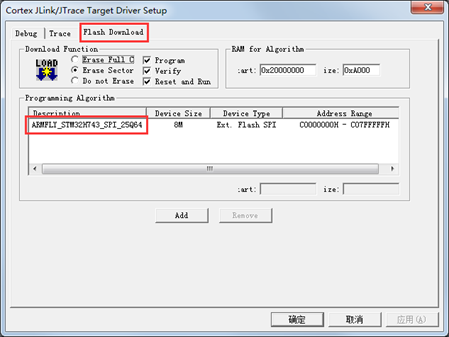
struct FlashDevice const FlashDevice = { FLASH_DRV_VERS, /* 驱动版本,勿修改,这个是MDK定的 */ "ARMFLY_STM32H743_SPI_25Q64", /* 算法名,添加算法到MDK安装目录会显示此名字 */ EXTSPI, /* 设备类型 */ 0xC0000000, /* Flash起始地址 */ 8 * 1024 * 1024, /* Flash大小,8MB */ 4096, /* 编程页大小 */ 0, /* 保留,必须为0 */ 0xFF, /* 擦除后的数值 */ 6000, /* 页编程等待时间 */ 6000, /* 扇区擦除等待时间 */ 4 * 1024, 0x000000, /* 扇区大小,扇区地址 */ SECTOR_END };
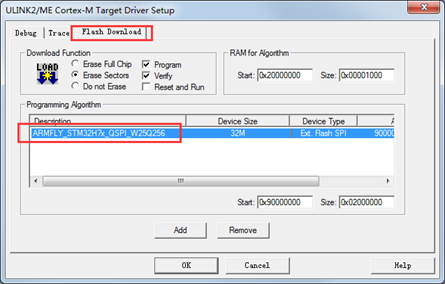
注释已经比较详细,大家根据自己的需要做修改即可。注意一点,算法名ARMFLY_STM32H743_SPI_W25Q64会反馈到这个地方:
84.4.6 第6步,编程文件FlashPrg.c的实现
下面将文件中实现的几个函数为大家做个说明:
- 初始化函数Init
/* ********************************************************************************************************* * 函 数 名: Init * 功能说明: Flash编程初始化 * 形 参: adr Flash基地址,芯片首地址。 * clk 时钟频率 * fnc 函数代码,1 - Erase, 2 - Program, 3 - Verify * 返 回 值: 0 表示成功, 1表示失败 ********************************************************************************************************* */ int Init (unsigned long adr, unsigned long clk, unsigned long fnc) { int result = 0; /* 系统初始化 */ SystemInit(); /* 时钟初始化 */ result = SystemClock_Config(); if (result != 0) { return 1; } bsp_InitSPIBus(); bsp_InitSFlash(); return 0; }
- 复位初始化函数Uinit
擦除,编程和校验函数后都会调用此函数,我们这里未使用。
/* ********************************************************************************************************* * 函 数 名: UnInit * 功能说明: 复位初始化 * 形 参: fnc 函数代码,1 - Erase, 2 - Program, 3 - Verify * 返 回 值: 0 表示成功, 1表示失败 ********************************************************************************************************* */ int UnInit (unsigned long fnc) { return (0); }
复位初始化这里,直接将其设置为内存映射模式。
- 整个芯片擦除函数EraseChip
如果大家配置勾选了MDK Option选项中此处的配置,会调用的整个芯片擦除:

实际应用中不推荐大家勾选这里,因为整个芯片擦除太耽误时间。
另外,如果大家的算法工程里面没有添加此函数,MDK会调用扇区擦除函数来实现,直到所有扇区擦除完毕。
/* ********************************************************************************************************* * 函 数 名: EraseChip * 功能说明: 整个芯片擦除 * 形 参: 无 * 返 回 值: 0 表示成功, 1表示失败 ********************************************************************************************************* */ int EraseChip (void) { sf_EraseChip(); return 0; }
- 扇区擦除函数EraseSector
如果大家配置勾选了MDK Option选项中此处的配置,会调用扇区擦除:
/* ********************************************************************************************************* * 函 数 名: EraseSector * 功能说明: 扇区擦除 * 形 参: adr 擦除地址 * 返 回 值: 无 ********************************************************************************************************* */ int EraseSector (unsigned long adr) { adr -= SPI_FLASH_MEM_ADDR; sf_EraseSector(adr); return 0; }
这里要注意两点:
(1) 程序里面的操作adr -= SPI_FLASH_MEM_ADDR,实际传递进来的地址是带了首地址的,即0xC0000000。特别注意,我们这里的0xC0000000是随意设置的,因为STM32H7的标准SPI外设并不支持内存映射。
(2) 这里执行的擦除大小要前面FlashDev.c文件中配置的扇区大小一致,这里是执行的4KB为扇区进行擦除。
- 页编程函数ProgramPage
页编程函数实现如下:
/* ********************************************************************************************************* * 函 数 名: ProgramPage * 功能说明: 页编程 * 形 参: adr 页起始地址 * sz 页大小 * buf 要写入的数据地址 * 返 回 值: 无 ********************************************************************************************************* */ int ProgramPage (unsigned long adr, unsigned long sz, unsigned char *buf) { adr -= SPI_FLASH_MEM_ADDR; sf_WriteBuffer(buf, adr, sz); return (0); }
这里注意两点:
(1) W25Q64的页大小是256字节,前面FlashDev.c中将页编程大小设置为4096字节,主要是方便擦除操作。
(2) 程序里面的操作adr -= SPI_FLASH_MEM_ADDR,实际传递进来的地址是带了首地址的,即0xC0000000。
- 读取和校验函数
校验函数实现如下:
/* ********************************************************************************************************* * 函 数 名: Verify * 功能说明: 校验 * 形 参: adr 起始地址 * sz 数据大小 * buf 要校验的数据缓冲地址 * 返 回 值: - ********************************************************************************************************* */ unsigned char aux_buf[4096]; unsigned long Verify (unsigned long adr, unsigned long sz, unsigned char *buf) { int i; adr -= SPI_FLASH_MEM_ADDR; sf_ReadBuffer(aux_buf, adr, sz); for (i = 0; i< sz; i++) { if (aux_buf[i] != buf[i]) return (adr+i); /* 校验失败 */ } adr += SPI_FLASH_MEM_ADDR; return (adr+sz); /* 校验成功 */ }
84.4.7 第7步,修改SPI Flash驱动文件(引脚,命令等)
最后一步就是SPI Flash(W25Q64)的驱动修改,大家可以根据自己的需求做修改。使用的引脚定义在文件bsp_spi_bus.c:
/* ********************************************************************************************************* * 时钟,引脚,DMA,中断等宏定义 ********************************************************************************************************* */ #define SPIx SPI1 #define SPIx_CLK_ENABLE() __HAL_RCC_SPI1_CLK_ENABLE() #define DMAx_CLK_ENABLE() __HAL_RCC_DMA2_CLK_ENABLE() #define SPIx_FORCE_RESET() __HAL_RCC_SPI1_FORCE_RESET() #define SPIx_RELEASE_RESET() __HAL_RCC_SPI1_RELEASE_RESET() #define SPIx_SCK_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() #define SPIx_SCK_GPIO GPIOB #define SPIx_SCK_PIN GPIO_PIN_3 #define SPIx_SCK_AF GPIO_AF5_SPI1 #define SPIx_MISO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() #define SPIx_MISO_GPIO GPIOB #define SPIx_MISO_PIN GPIO_PIN_4 #define SPIx_MISO_AF GPIO_AF5_SPI1 #define SPIx_MOSI_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() #define SPIx_MOSI_GPIO GPIOB #define SPIx_MOSI_PIN GPIO_PIN_5 #define SPIx_MOSI_AF GPIO_AF5_SPI1
硬件设置了之后,剩下就是SPI Flash相关的几个配置和片选引脚配置,在文件bsp_spi_flash.c:
主要是下面这几个:
/* 串行Flash的片选GPIO端口, PD13 */ #define SF_CS_CLK_ENABLE() __HAL_RCC_GPIOD_CLK_ENABLE() #define SF_CS_GPIO GPIOD #define SF_CS_PIN GPIO_PIN_13 #define SF_CS_0() SF_CS_GPIO->BSRR = ((uint32_t)SF_CS_PIN << 16U) #define SF_CS_1() SF_CS_GPIO->BSRR = SF_CS_PIN #define CMD_AAI 0xAD /* AAI 连续编程指令(FOR SST25VF016B) */ #define CMD_DISWR 0x04 /* 禁止写, 退出AAI状态 */ #define CMD_EWRSR 0x50 /* 允许写状态寄存器的命令 */ #define CMD_WRSR 0x01 /* 写状态寄存器命令 */ #define CMD_WREN 0x06 /* 写使能命令 */ #define CMD_READ 0x03 /* 读数据区命令 */ #define CMD_RDSR 0x05 /* 读状态寄存器命令 */ #define CMD_RDID 0x9F /* 读器件ID命令 */ #define CMD_SE 0x20 /* 擦除扇区命令 */ #define CMD_BE 0xC7 /* 批量擦除命令 */ #define DUMMY_BYTE 0xA5 /* 哑命令,可以为任意值,用于读操作 */ #define WIP_FLAG 0x01 /* 状态寄存器中的正在编程标志(WIP) */
84.5 SPI Flash的MDK下载算法使用方法
编译本章教程配套的例子,生成的算法文件位于此路径下:

84.5.1 下载算法存放位置
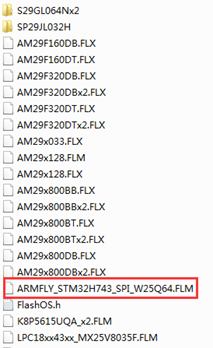
生成算法文件后,需要大家将其存到MDK安装目录,有两个位置可以存放,任选其一,推荐第2种:
- 第1种:存放到MDK的STM32H7软包安装目录里面:KeilSTM32H7xx_DFP2.6.0CMSISFlash(软包版本不同,数值2.6.0不同)。
- 第2种:MDK的安装目录 ARMFlash里面。
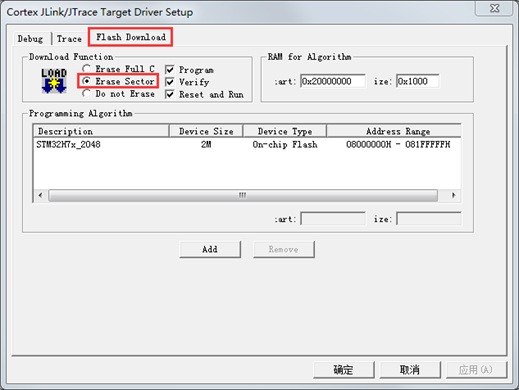
84.5.2 下载配置
注意这里一定要够大,否则会提示算法文件无法加载:
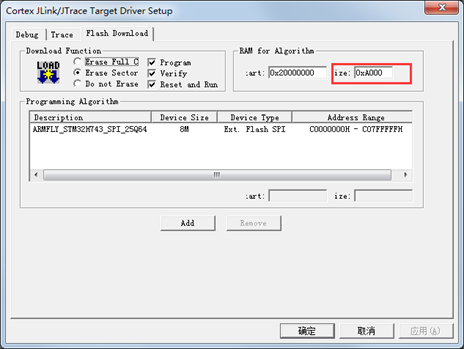
我们这里是将其加到DTCM中,即首地址为0x20000000,大家也可以存储到任意其它RAM地址,只要空间还够加载算法文件即可。推荐使用AXI SRAM(地址0x24000000),因为这块RAM空间足够大。
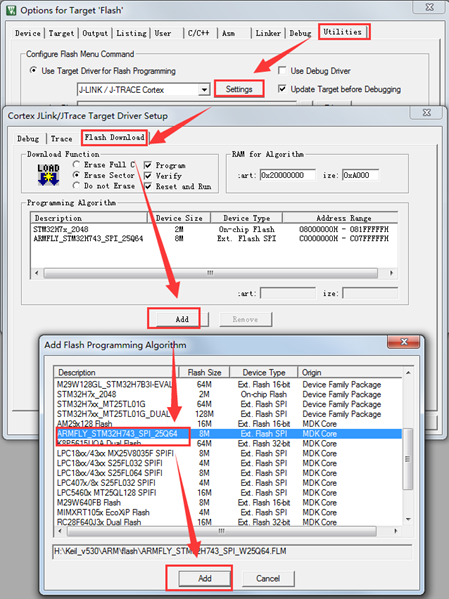
如果要下载程序到QSPI Flash里面,需要做如下配置:
84.5.3 验证算法文件是否可以正常使用
为了验证算法文件是否可以正常使用,大家可以运行本教程第86章配套的例子。
84.6 实验例程说明
本章配套例子:V7-065_SPI Flash的MDK下载算法制作
编译后,算法文件会存到此路径下:
84.7 总结
本章节就为大家讲解这么多,为了熟练掌握,大家可以尝试自己实现一个Flash下载算法。