10.9室内定位实践
1,室内定位的文件在/home/l/code/xiangmu1/agv/localizaition/src/localization/src/indoor_localization文件夹下。
2,在路径下 /home/l/code/xiangmu1/agv/localizaition 编译运行
按照依赖顺序编译: catkin_make --pkg package_name
catkin_make
lz4.h相关的问题

3,节点运行
source ./devel/setup.bash
roslaunch localization_fuse indoor_localization.launch
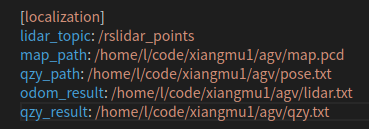
修改路径错误:
修改/home/l/code/xiangmu1/agv路径下的congig文件中location相关的路径
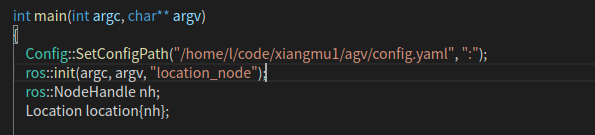
修改/home/l/code/xiangmu1/agv/localizaition/src/localization/src/indoor_localization下Location.cpp的路径位置
4,激光雷达运行

在这个文件cmake make
运行某个文件
激光雷达IP 192.168.1.102
10.18采集lidar、GNSS数据
小车全部拨上去才是开启状态,再双按按钮,再拨下来才是开启状态
运行激光雷达节点
roslaunch rs_lidar start
运行GNSS节点:运行GNSS数据节点 20210929-GNSS-HUACE
rosrun n_gnss_prep n_gnss_prep
http://192.168.200.1浏览器输入 查看是否有消息
admin
passward
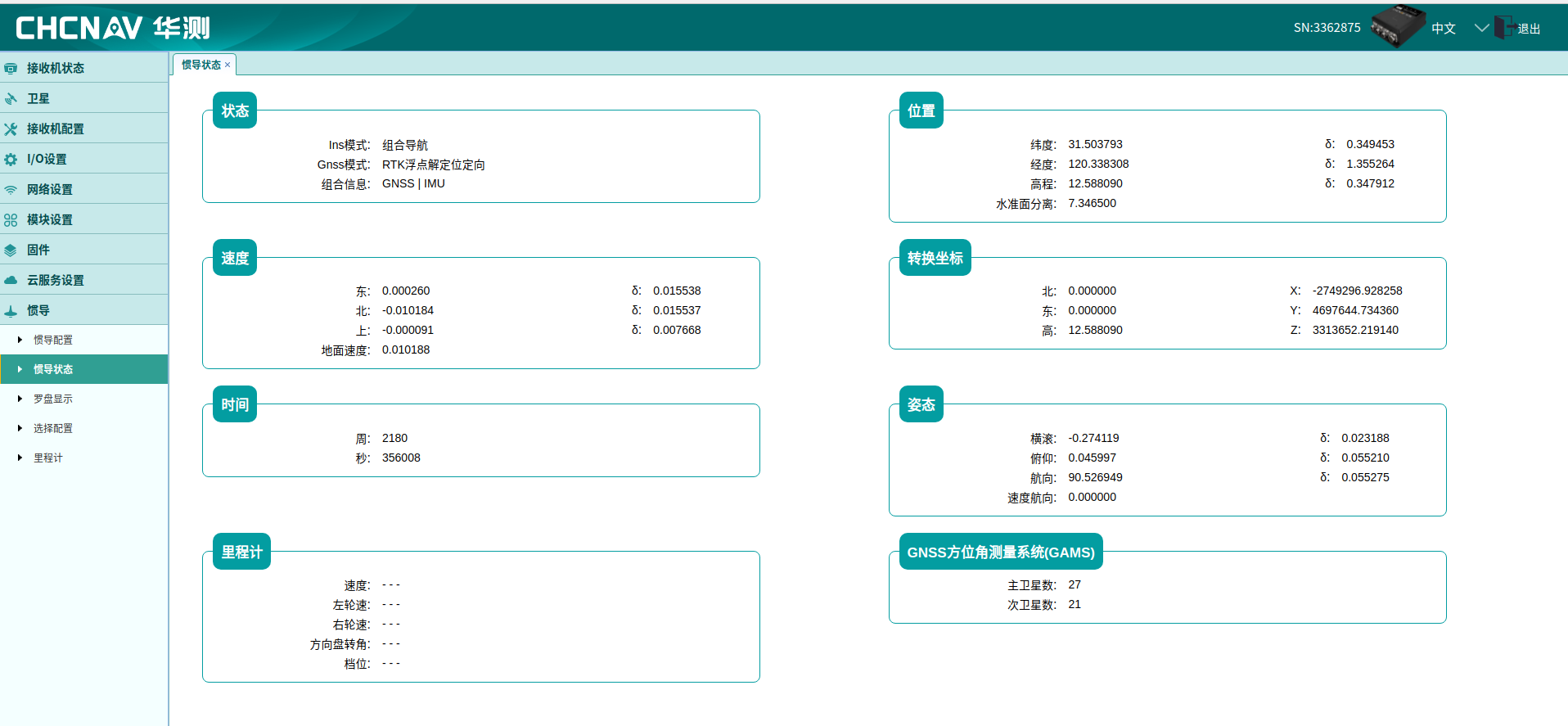
室外Gnss有消息,可以查看topic
采数据:运行rosbag采数据
rosbag record /msg_gnss_prep_long /rslidar_points
建图:运行yuanqu文件夹的文件建图
1, 运行小车节点:roslaunch car_model car.launch
2,运行建图节点: rosrun localization_fuse mapping_node
3,播放地图
rosbag play -r 2 xx.bag
10.20远程操作:
ifconfig查看自己的IP
ssh远程操作:ping 172.16.0.134 连接是否接通
$ ssh user@host 如:ssh pika@192.168.0.111
scp
scp -r ./ubuntu_env/ root@192.168.0.111:/home/pipi