环境:Ubuntu 16.04
VoxelGrid滤波器
使用VoxelGrid滤波器对点云进行下采样
使用体素化网格方法实现下采样,即减少点的数量 减少点云数据,并同时保存点云的形状特征,在提高配准,曲面重建,形状识别等算法速度中非常实用,PCL是实现的VoxelGrid类通过输入的点云数据创建一个三维体素栅格,容纳后每个体素内用体素中所有点的重心来近似显示体素中其他点,这样该体素内所有点都用一个重心点最终表示,对于所有体素处理后得到的过滤后的点云,这种方法比用体素中心逼近的方法更慢,但是对于采样点对应曲面的表示更为准确。
准备一个pcd文件 rabbit.pcd
链接:https://pan.baidu.com/s/1VWbTInrZ3Z9g23baage7ow
提取码:2ins
一、创建 pcl_voxel_grid.cpp CMakeLists.txt
pcl_voxel_grid.cpp
#include <iostream> #include <pcl/io/pcd_io.h> #include <pcl/point_types.h> #include <pcl/filters/voxel_grid.h> int main (int argc, char** argv) { pcl::PCLPointCloud2::Ptr cloud (new pcl::PCLPointCloud2 ()); pcl::PCLPointCloud2::Ptr cloud_filtered (new pcl::PCLPointCloud2 ()); //点云对象的读取 pcl::PCDReader reader; reader.read ("rabbit.pcd", *cloud); //读取点云到cloud中 std::cerr << "PointCloud before filtering: " << cloud->width * cloud->height << " data points (" << pcl::getFieldsList (*cloud) << ")." << std::endl; /****************************************************************************** 创建一个叶大小为0.8*0.8*0.8的pcl::VoxelGrid滤波器, **********************************************************************************/ pcl::VoxelGrid<pcl::PCLPointCloud2> sor; //创建滤波对象 sor.setInputCloud (cloud); //设置需要过滤的点云给滤波对象 sor.setLeafSize (0.8f, 0.8f, 0.8f); //设置滤波时创建的体素体积为0.8*0.8*0.8 m³的立方体 sor.filter (*cloud_filtered); //执行滤波处理,存储输出 std::cerr << "PointCloud after filtering: " << cloud_filtered->width * cloud_filtered->height << " data points (" << pcl::getFieldsList (*cloud_filtered) << ")." << std::endl; pcl::PCDWriter writer; writer.write ("rabbit_downsampled.pcd", *cloud_filtered, Eigen::Vector4f::Zero (), Eigen::Quaternionf::Identity (), false); return (0); }
CMakeLists.txt
cmake_minimum_required(VERSION 2.8 FATAL_ERROR) project(pcl_voxel_grid) find_package(PCL 1.2 REQUIRED) include_directories(${PCL_INCLUDE_DIRS}) link_directories(${PCL_LIBRARY_DIRS}) add_definitions(${PCL_DEFINITIONS}) add_executable (pcl_voxel_grid pcl_voxel_grid.cpp) target_link_libraries (pcl_voxel_grid ${PCL_LIBRARIES})
创建build文件夹
mkdir build cd build cmake .. make
将rabbit.pcd拷贝到build文件夹,运行程序
./pcl_voxel_grid
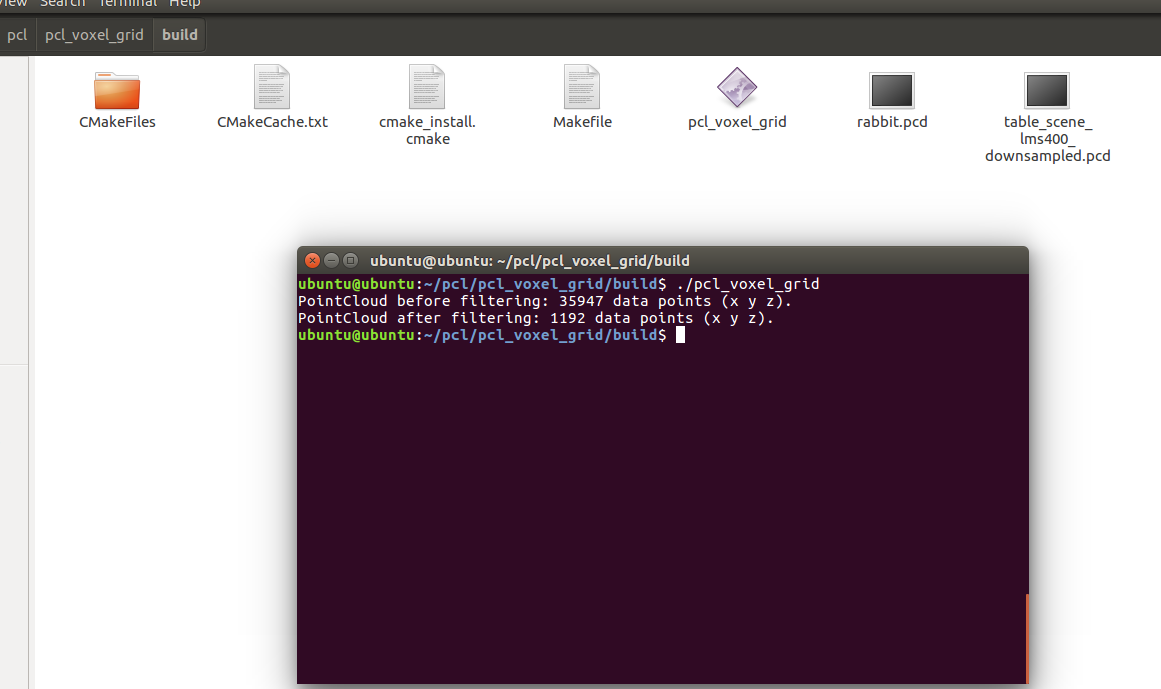
可见 35947个点云数据已经被过滤到1192个点云,文件夹下生成了新的pcd文件
pcl_viewer显示滤波后的点云
pcl_viewer rabbit_downsample.pcd
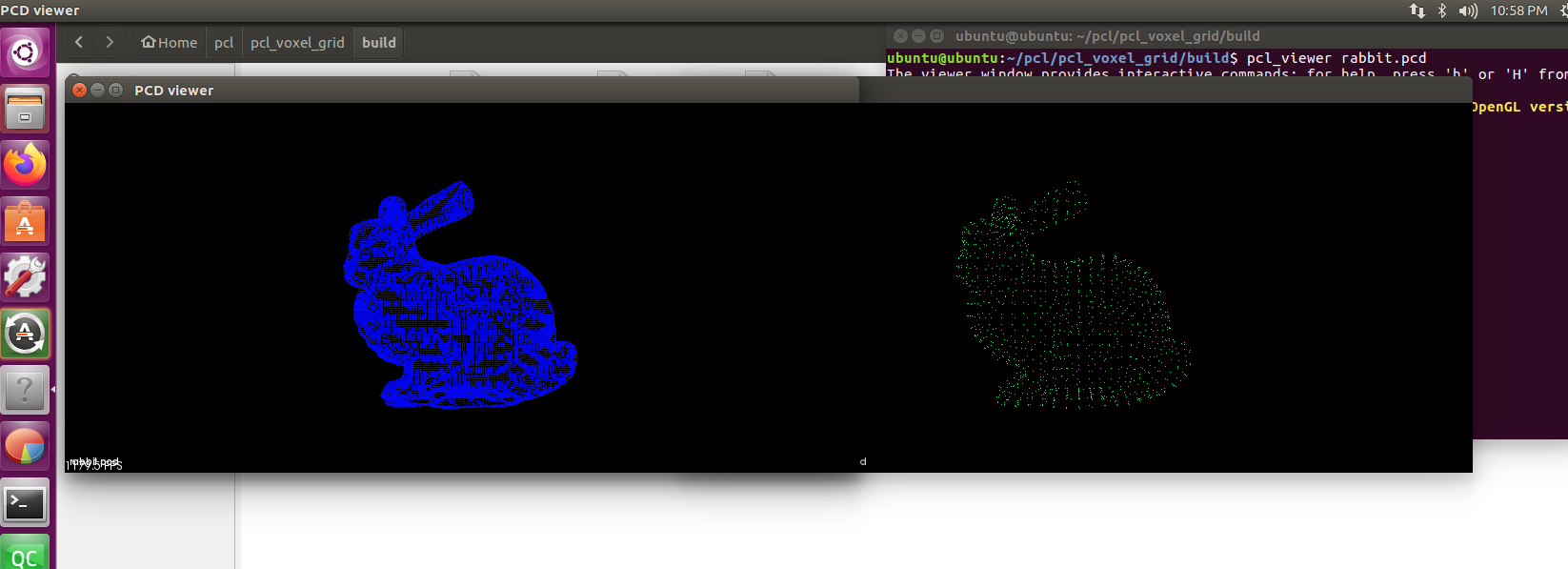
原始点云与滤波后的点云可视化结果,明显的可以看出来,点的密度大小与整齐程度不同,虽然处理后的数据量大大减小,但是很明显所含有的形状特征和空间结构信息与原始点云差不多。