*本文针对如何结合turtlebot3和Open-Manipulator机械臂做出讲解
测试在Ubuntu 16.04, Linux Mint 18.1和ROS Kinetic Kame下进行
具体步骤如下:
安装依赖包
sudo apt-get install ros-kinetic-moveit* ros-kinetic-dynamixel-sdk ros-kinetic-dynamixel-workbench-toolbox ros-kinetic-robotis-math ros-kinetic-industrial-core
安装open_manipulator
cd ~/catkin_ws/src/
git clone https://github.com/ROBOTIS-GIT/open_manipulator.git
cd ~/catkin_ws && catkin_make
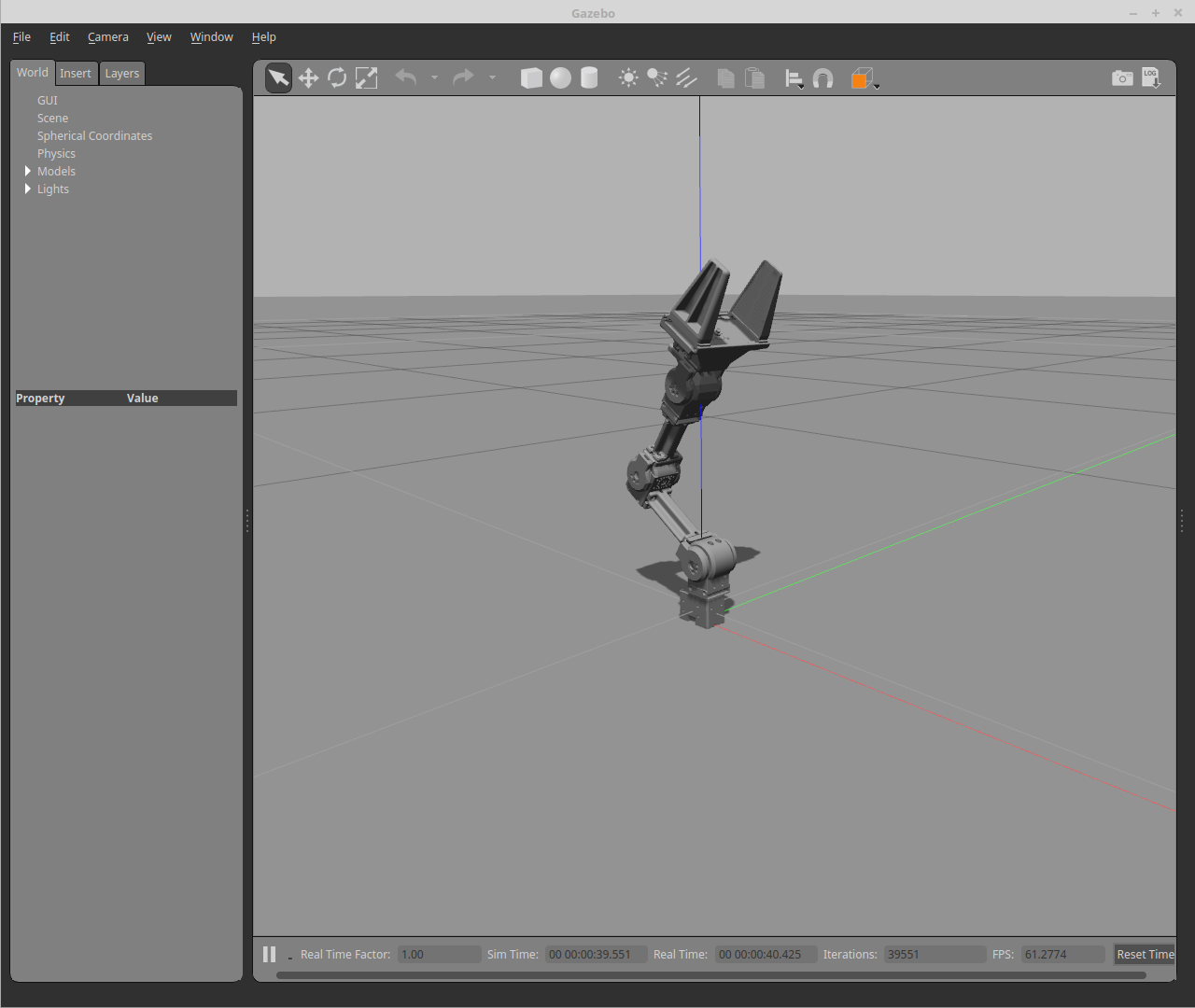
在Gazebo环境中启动Open-Manipulator
roslaunch open_manipulator_gazebo open_manipulator_gazebo.launch

发布话题控制open_manipulator
rostopic pub /open_manipulator_chain/joint2_position/command std_msgs/Float64 "data: 1.0" --once
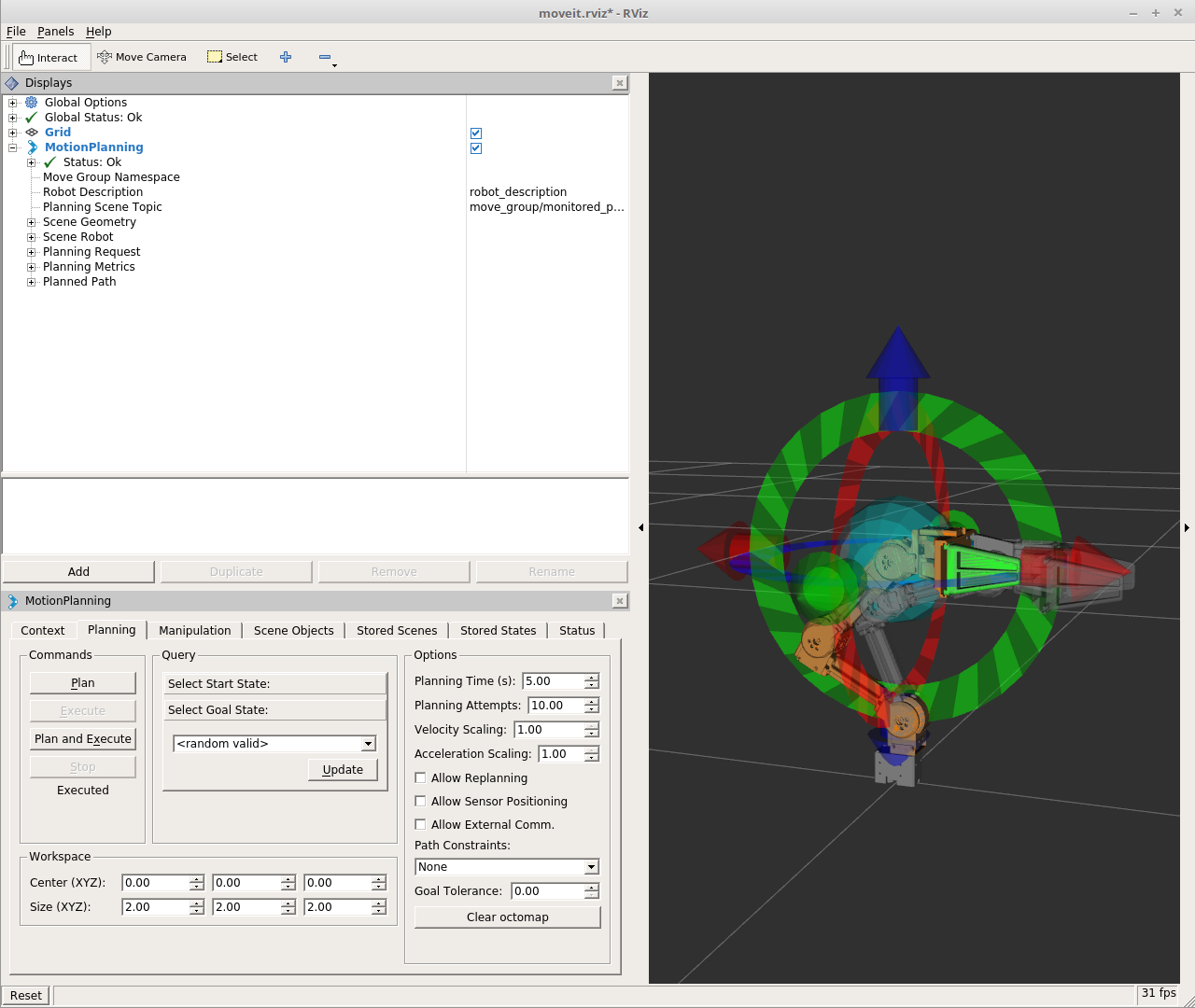
新终端打开,在moveit中使用open_manipulator
roslaunch open_manipulator_moveit open_manipulator_demo.launch use_gazebo:=true
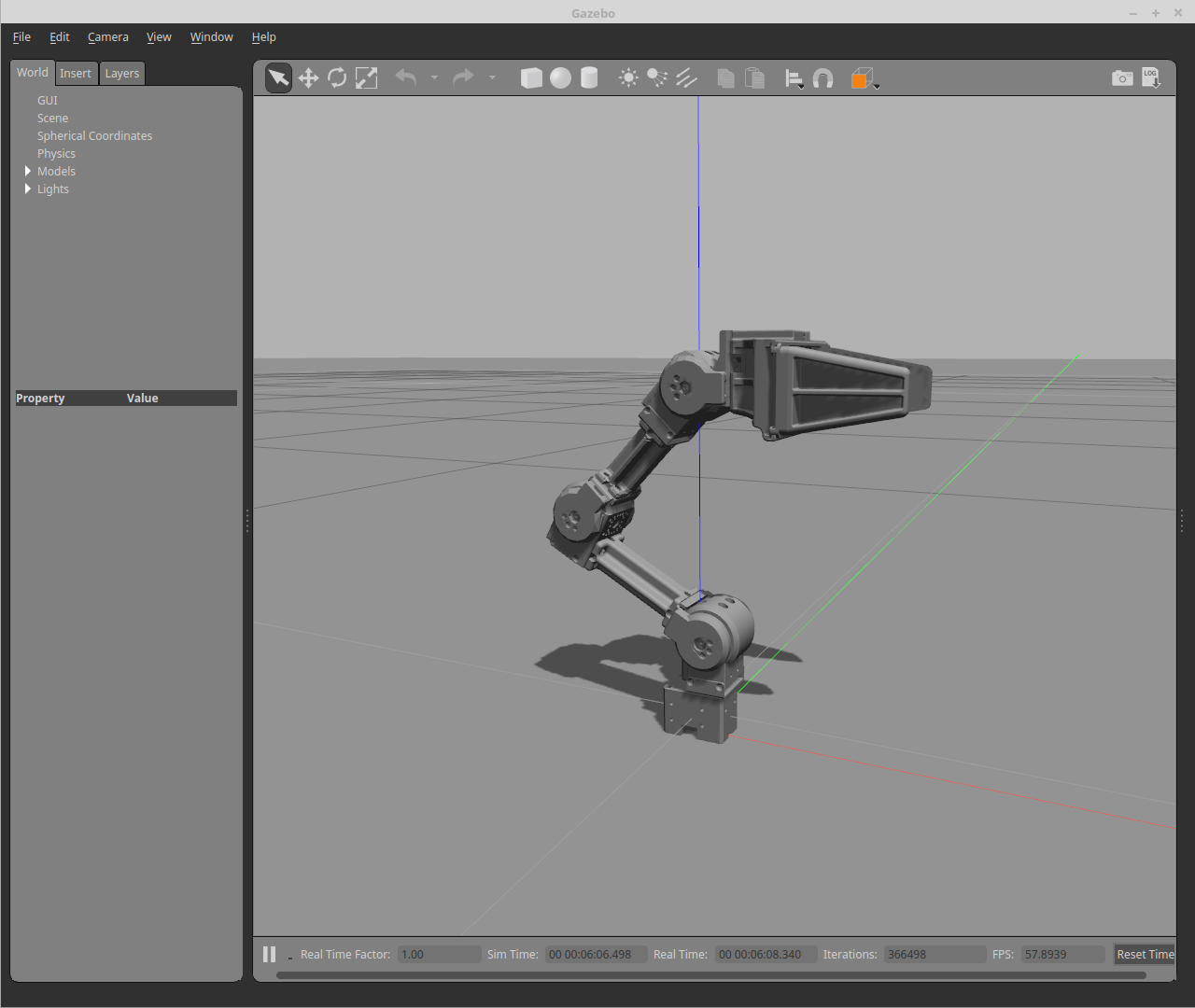
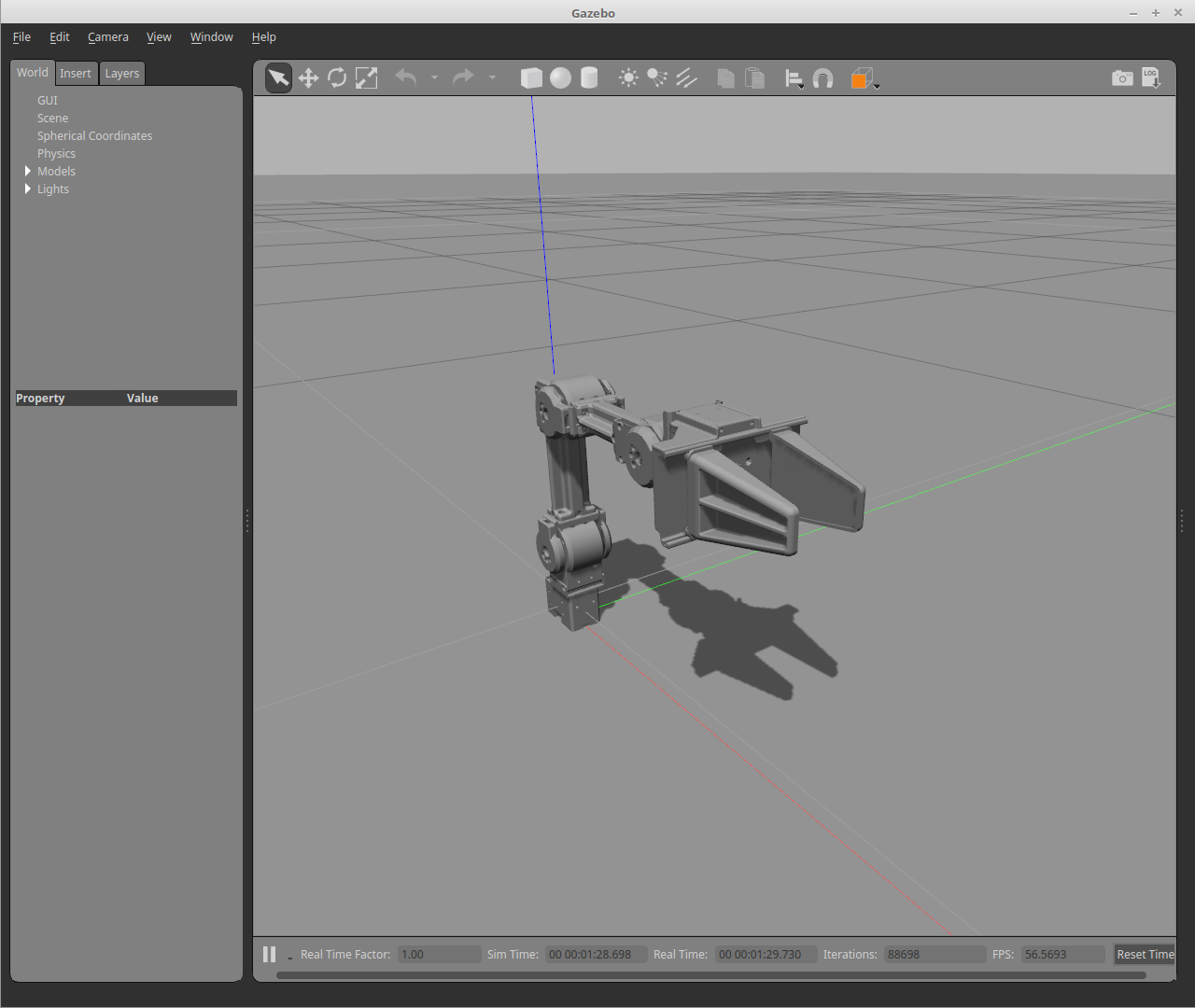
发布话题控制机械爪
rostopic pub /robotis/open_manipulator/gripper std_msgs/String "data: 'grip_on'" --once
机械臂平台:
启动dynamixel系列的Open-Manipulator
roslaunch open_manipulator_dynamixel_ctrl dynamixel_controller.launch
利用moveit控制
roslaunch open_manipulator_moveit open_manipulator_demo.launch
Turtlebot3-waffle结合Open-Manipulator
安装依赖:
cd ~/catkin_ws/src
git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
cd ~/catkin_ws && catkin_make
启动rviz并显示模型
roslaunch open_manipulator_with_tb3 open_manipulator_chain_with_tb3_rviz.launch
