机器人的研究领域在不断的拓宽,智能机器人的研究在AI领域一直是研究的热点之一。想要让智能机器人具有类似人类的智能、灵活性就少不了一个重要的角色舵机。舵机是机器人产品中非常重要的部件,它是由微型电机与齿轮组及传感器等部件组成,在机器人应用中,舵机是连接各机构的连接器,就像我们人类的关节一样,通过微型电机的驱动可实现各种动作。舵机决定了机器人产品动作的流畅度和精度,所以无论是在舵机结构方面还是微型电机的性能方面,各企业都在想各种办法提升。下面我就根据当下一些目前比较主流的几种系列舵机进行一下简单的描述。
Dynamixel AX-12A 简介
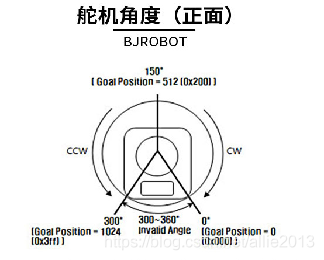
Dynamixel系列机器人驱动器是一个非常流行的模块化的驱动器,由齿轮减速器、精密直流电机和具有串联功能的电路板分别单一封装组成。尽管它体积小巧紧凑,但它可以产生很大扭矩,加上由高品质材料制造,具有很好的强度来抵御一定强度的外部冲击。它还具有检测内部温度功能,例如改变内部温度和供电电压。 Dynamixel系列中AX-12A专用机器人伺服电机与传统的伺服电机相比,AX-12A不但具有位置反馈,而且还有速度反馈与温度反馈功能,支持高速串行网络。 AX-12A数字伺服电机不像一般的R/C微伺服电机(舵机)使用PWM (脉冲宽度调制)控制,它需要使用CM-5 Dynamixel AX-12A伺服电机专用控制器控制。当用做关节电机时,可以旋转0~300°;当用作轮子驱动时,可以选择360°连续旋转模式。更重要的是AX-12A提供了高达16kg·cm的扭矩,是一般数字舵机的2倍,动力十足,是一款真正意义上的机器人专用伺服电机,特别适用于机器人竞赛。

性能介绍及专业控制器接法:

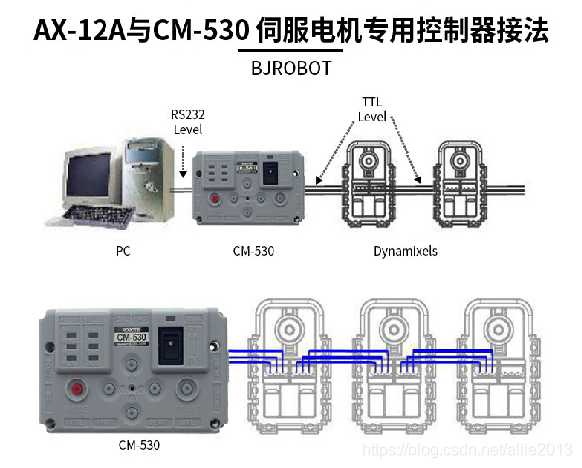
兼容产品:控制器:CM-5,CM-510,CM530,CM-700,OpenCM9.04(+ OpenCM485扩展板) OpenCR
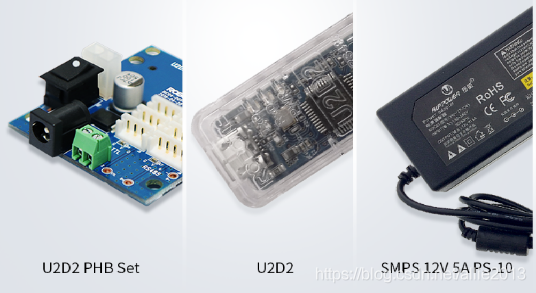
接口:USB2Dynamixel,U2D2
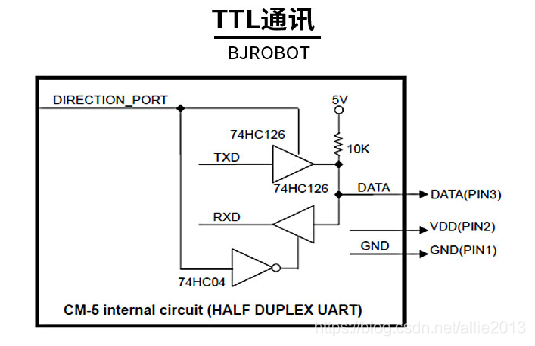
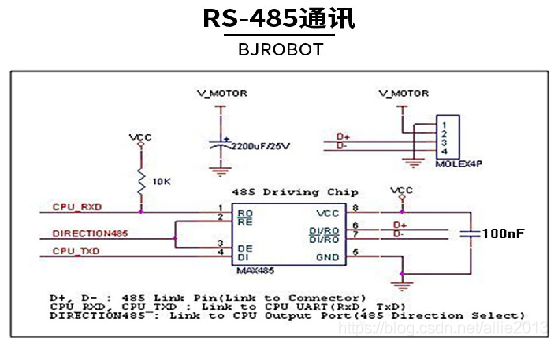
对通讯方式的描述:
DYNAMIXEL PRO PH54-200-S500-R 简介
DYNAMIXEL是机器人专有的智能执行器,在一个DC伺服模块中完全集成了DC电动机+减速机+控制器+驱动器+网络。 DYNAMIXEL-P系列采用可拆卸的减速摆线齿轮,因此具有很高的精度和抗冲击性。 -基于电流感应的转矩控制 -基于位置,扭矩和速度的命 -结合了增量式编码器和非接触式绝对式编码器的高分辨率 -全金属外壳,耐用性高 -可用于制作全尺寸机械手,云台倾斜,人形机器人等。 [DYNAMIXEL PRO-> P]升级详细信息 -改进的设计和JST连接器的应用 -改善了灰尘的流入和泄漏 -改进的控制表(支持X系列功能) -增强的控制性能,例如响应能力和分辨率 -增强了沟通响应能力 -改善了散热,噪音和耐用性。

兼容产品: 控制器:OpenCM 485扩展板,OpenCR1.0 接口:USB2Dynamixel,U2D2 波特率:57600bps (用户可以根据环境更改各种设置,包括ID和波特率) 支架及手臂:FRP54-I110K set、FRP54-A110K set、FRP54-H221K Set、RM-P60-RNH 工作电压与其他DYNAMIXEL系列不同(工作电压:24V)。 根据使用的装置数量建议使用单独的电源 JST 4Pin连接器用于通讯。
性能介绍及技术指标:

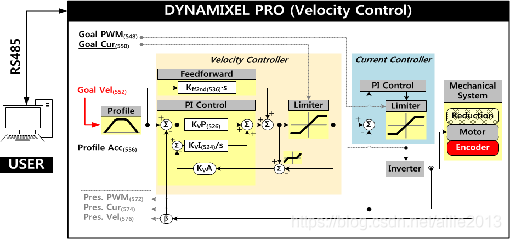
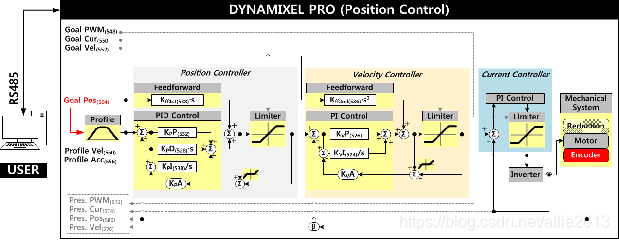
控制器示意图:
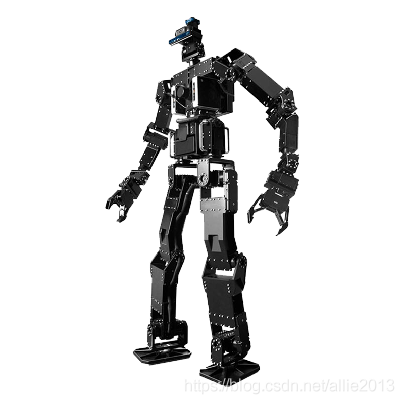
应用案例:
托尔THOR(战术危险操作机器人-Tactical Hazardous Operations Robot)是一款价格实惠,全尺寸、杰出的仿人型机器人平台,其拥有强大的计算能力,配置复杂的传感器,具有高负载能力和动态运动能力,为多种研究和教育活动提供可能,为科研工作呈现更多机会与可能。 行进步态稳定,设计人性化 使用适配的抓手出色完成任务 配置功能强大的Intel NUC双PC 多种传感配置如压力/扭矩传感器 LIDAR/IMU/摄像头 ROS支持3D CAD数据和开源SDK 基于模块化设计的PRO舵机,打造全金属机身 适合用于SLAM,运动,操纵和HRI研究。

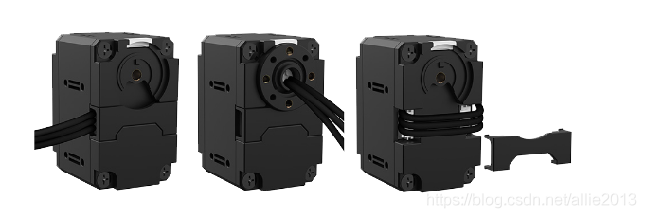
DYNAMIXEL XL430-W250-T 简介
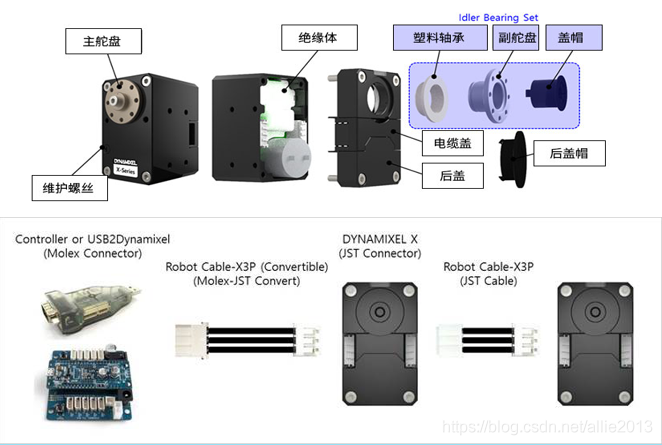
DYNAMIXEL是机器人专有的智能执行器,在一个DC伺服模块中完全集成了DC电动机+减速机+控制器+驱动器+网络。 DYNAMIXEL XL系列采用了非接触式磁性编码器和中空后盖装配结构的新功能,可实现360度控制模式。 XL系列具有与XM430和XH430相同的机械结构,并且与各个型号兼容。 1.多种操作模式 速度控制,位置控制,扩展位置控制,PWM控制 2.用于平滑运动计划的轮廓控制 3.中空后盖可最大程度地减少电缆应力(3路布线) 4.将螺丝直接安装到外壳上(无螺母插入) 5.降低电流的节能
兼容产品:控制器:OpenCM9.04 485扩展板,OpenCR1.0 接口:USB2Dynamixel,U2D2 连接方法
应用案例 :
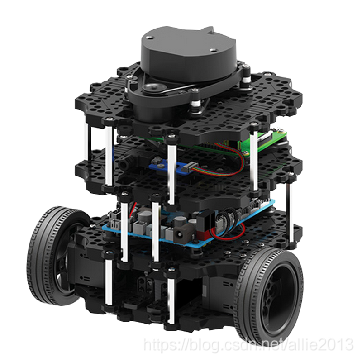
重点可实现功能:
SLAM建图【多图已收集】 Navigation导航【多图已收集】 Simulation模拟【多图已收集】 Manipulation操纵【多图已收集】 Autonomous Driving自动驾驶【多图已收集】 Machine Learning机器学习【多图已收集】 Locomotion运动【多图已收集】
DYNAMIXEL XM430-W350-R/T 简介
DYNAMIXEL是机器人专有的智能执行器,具有完全集成的直流电动机+减速机+控制器+驱动器+网络在1个直流伺服模块里。 DYNAMIXEL-XH / XM系列基于高性能电流感应算法提供了多种控制技术。 它采用铝制外壳,并采用了中空电缆紧固结构等新技术,以方便用户使用。 1. 6种操作模式 转矩控制,速度控制,位置控制,扩展位置控制,基于电流的位置控制,PWM控制 2.用于平滑运动计划的轮廓控制 3.改进的散热器,带有铝制外壳 4.中空后盖可最大程度地减少电缆应力(3路布线) 5.将螺丝直接安装到外壳上(无螺母插入) 6.节能(电流从100mA降低到40mA) 7.体积比以前的型号减少31%。
兼容产品:控制器:OpenCM 485扩展板,OpenCR1.0 接口:USB2Dynamixel,U2D2
性能介绍:

应用案例:
ROBOTIS-OP3, 是一款小型仿人机器人平台,具有杰出的计算能力,多种复杂的传感器、高负载能力和动态运动,为OP3带来更多激动人心的研究和教育活动的能力,适合各种研究、教学、比赛等。它是新的小型仿人机器人平台,一个明显的变化是ROBOTIS OP3机器人用XM舵机替代了MX-28舵机,另一个重要的变化是在内部PC上,用基于Intel i3的NUC取代了基于Atom的SBC(单板计算机)。
高性能和高级功能 ▪内置PC:配备Intel Core i3处理器,RAM 8GB DDR4、128GB M.2 SSD的Intel NUC ▪管理控制器(OpenCR):ARM Cortex-M7 ▪20个执行器模块(6个自由度支腿x2 + 3个自由度支臂x2 + 2个自由度颈) ▪带耐用金属外壳和齿轮的执行器(DYNAMIXEL XM430) ▪自我维护套件(易于遵循的步骤和说明) ▪待机模式以降低功耗 ▪4.5Mbps高速Dynamixel总线,用于联合控制 ▪1800mAh LIPO电池(工作30分钟),充电器和外部电源适配器 (可以通过从机器人上卸下电池而无需在移除前通过插入外部电源来关闭电池) ▪多种功能(可以接受旧的,当前的和将来的外围设备) ▪3轴陀螺仪,3轴加速度计,3轴磁力计,按钮x4,麦克风x2,扬声器x1。

推荐:DYNAMIXEL Starter Set 舵机启动套件: