# OpenCV中stitching的使用
OpenCV提供了高级别的函数封装在Stitcher类中,使用很方便,不用考虑太多的细节。
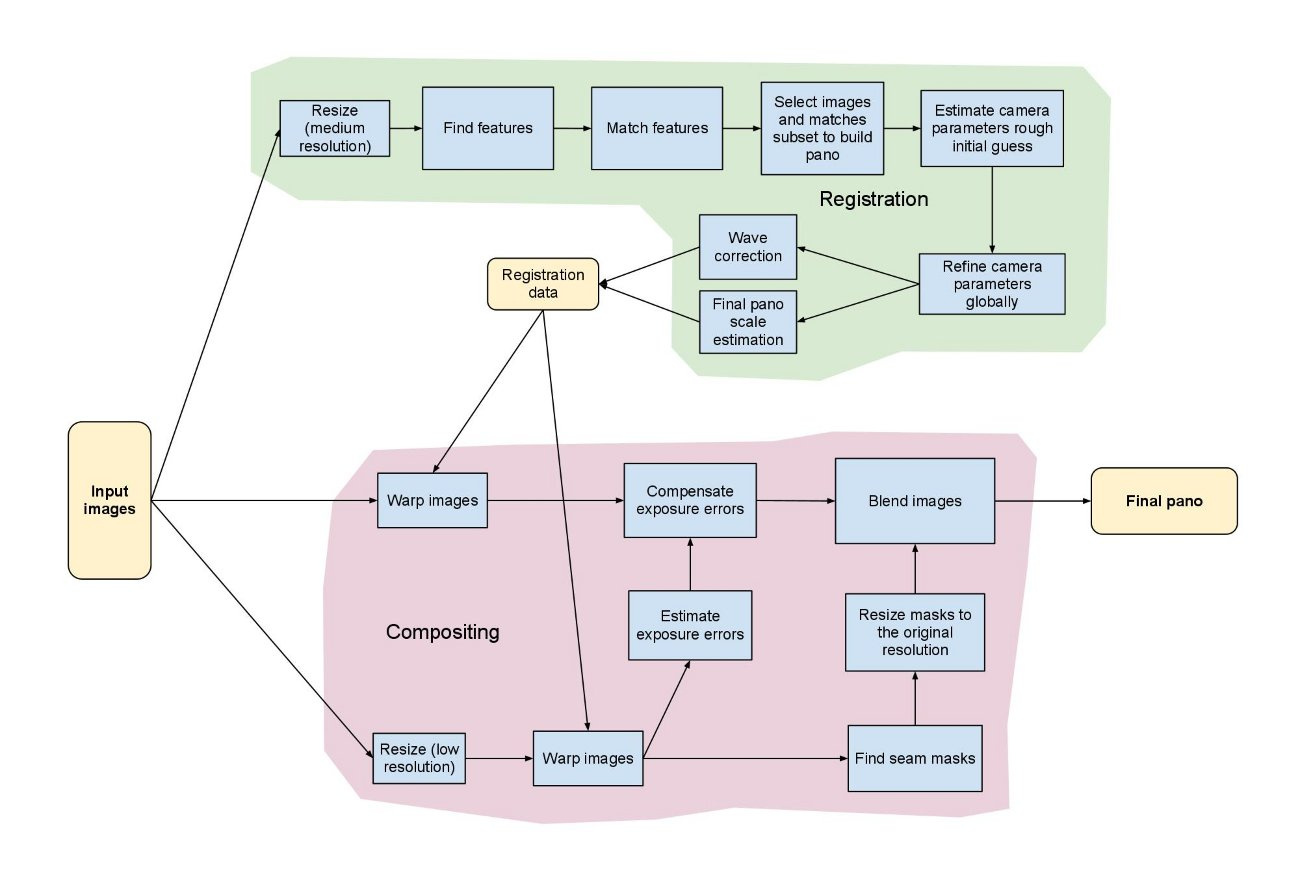
低级别函数封装在detail命名空间中,展示了OpenCV算法实现的很多步骤和细节,使熟悉如下拼接流水线的用户,方便自己定制。
可见OpenCV图像拼接模块的实现是十分精密和复杂的,拼接的结果很完善,但同时也是费时的,完全不能够实现实时应用。
官方提供的stitching和stitching_detailed使用示例,分别是高级别和低级别封装这两种方式正确地使用示例。两种结果产生的拼接结果相同,后者却可以允许用户,在参数变量初始化时,选择各项算法。
具体算法流程:
- 命令行调用程序,输入源图像以及程序的参数
- 特征点检测,判断是使用surf还是orb,默认是surf。
- 对图像的特征点进行匹配,使用最近邻和次近邻方法,将两个最优的匹配的置信度保存下来。
- 对图像进行排序以及将置信度高的图像保存到同一个集合中,删除置信度比较低的图像间的匹配,得到能正确匹配的图像序列。这样将置信度高于门限的所有匹配合并到一个集合中。
- 对所有图像进行相机参数粗略估计,然后求出旋转矩阵
- 使用光束平均法进一步精准的估计出旋转矩阵。
- 波形校正,水平或者垂直
- 拼接
- 融合,多频段融合,光照补偿,
代码:
#include "pch.h"
#include <iostream>
#include <fstream>
#include <string>
#include "opencv2/opencv_modules.hpp"
#include <opencv2/core/utility.hpp>
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/stitching/detail/autocalib.hpp"
#include "opencv2/stitching/detail/blenders.hpp"
#include "opencv2/stitching/detail/timelapsers.hpp"
#include "opencv2/stitching/detail/camera.hpp"
#include "opencv2/stitching/detail/exposure_compensate.hpp"
#include "opencv2/stitching/detail/matchers.hpp"
#include "opencv2/stitching/detail/motion_estimators.hpp"
#include "opencv2/stitching/detail/seam_finders.hpp"
#include "opencv2/stitching/detail/warpers.hpp"
#include "opencv2/stitching/warpers.hpp"
#ifdef HAVE_OPENCV_XFEATURES2D
#include "opencv2/xfeatures2d/nonfree.hpp"
#endif
#define ENABLE_LOG 1
#define LOG(msg) std::cout << msg
#define LOGLN(msg) std::cout << msg << std::endl
using namespace std;
using namespace cv;
using namespace cv::detail;
static void printUsage()
{
cout <<
"Rotation model images stitcher.
"
"stitching_detailed img1 img2 [...imgN] [flags]
"
"Flags:
"
" --preview
"
" Run stitching in the preview mode. Works faster than usual mode,
"
" but output image will have lower resolution.
"
" --try_cuda (yes|no)
"
" Try to use CUDA. The default value is 'no'. All default values
"
" are for CPU mode.
"
"
Motion Estimation Flags:
"
" --work_megapix <float>
"
" Resolution for image registration step. The default is 0.6 Mpx.
"
" --features (surf|orb|sift|akaze)
"
" Type of features used for images matching.
"
" The default is surf if available, orb otherwise.
"
" --matcher (homography|affine)
"
" Matcher used for pairwise image matching.
"
" --estimator (homography|affine)
"
" Type of estimator used for transformation estimation.
"
" --match_conf <float>
"
" Confidence for feature matching step. The default is 0.65 for surf and 0.3 for orb.
"
" --conf_thresh <float>
"
" Threshold for two images are from the same panorama confidence.
"
" The default is 1.0.
"
" --ba (no|reproj|ray|affine)
"
" Bundle adjustment cost function. The default is ray.
"
" --ba_refine_mask (mask)
"
" Set refinement mask for bundle adjustment. It looks like 'x_xxx',
"
" where 'x' means refine respective parameter and '_' means don't
"
" refine one, and has the following format:
"
" <fx><skew><ppx><aspect><ppy>. The default mask is 'xxxxx'. If bundle
"
" adjustment doesn't support estimation of selected parameter then
"
" the respective flag is ignored.
"
" --wave_correct (no|horiz|vert)
"
" Perform wave effect correction. The default is 'horiz'.
"
" --save_graph <file_name>
"
" Save matches graph represented in DOT language to <file_name> file.
"
" Labels description: Nm is number of matches, Ni is number of inliers,
"
" C is confidence.
"
"
Compositing Flags:
"
" --warp (affine|plane|cylindrical|spherical|fisheye|stereographic|compressedPlaneA2B1|compressedPlaneA1.5B1|compressedPlanePortraitA2B1|compressedPlanePortraitA1.5B1|paniniA2B1|paniniA1.5B1|paniniPortraitA2B1|paniniPortraitA1.5B1|mercator|transverseMercator)
"
" Warp surface type. The default is 'spherical'.
"
" --seam_megapix <float>
"
" Resolution for seam estimation step. The default is 0.1 Mpx.
"
" --seam (no|voronoi|gc_color|gc_colorgrad)
"
" Seam estimation method. The default is 'gc_color'.
"
" --compose_megapix <float>
"
" Resolution for compositing step. Use -1 for original resolution.
"
" The default is -1.
"
" --expos_comp (no|gain|gain_blocks|channels|channels_blocks)
"
" Exposure compensation method. The default is 'gain_blocks'.
"
" --expos_comp_nr_feeds <int>
"
" Number of exposure compensation feed. The default is 1.
"
" --expos_comp_nr_filtering <int>
"
" Number of filtering iterations of the exposure compensation gains.
"
" Only used when using a block exposure compensation method.
"
" The default is 2.
"
" --expos_comp_block_size <int>
"
" BLock size in pixels used by the exposure compensator.
"
" Only used when using a block exposure compensation method.
"
" The default is 32.
"
" --blend (no|feather|multiband)
"
" Blending method. The default is 'multiband'.
"
" --blend_strength <float>
"
" Blending strength from [0,100] range. The default is 5.
"
" --output <result_img>
"
" The default is 'result.jpg'.
"
" --timelapse (as_is|crop)
"
" Output warped images separately as frames of a time lapse movie, with 'fixed_' prepended to input file names.
"
" --rangewidth <int>
"
" uses range_width to limit number of images to match with.
";
}
// Default command line args
vector<String> img_names;
bool preview = false;
bool try_cuda = false;
double work_megapix = 0.6;
double seam_megapix = 0.1;
double compose_megapix = -1;
float conf_thresh = 1.f;
#ifdef HAVE_OPENCV_XFEATURES2D
string features_type = "surf";
#else
string features_type = "orb";
#endif
string matcher_type = "homography";
string estimator_type = "homography";
string ba_cost_func = "ray";
string ba_refine_mask = "xxxxx";
bool do_wave_correct = true;
WaveCorrectKind wave_correct = detail::WAVE_CORRECT_HORIZ;
bool save_graph = false;
std::string save_graph_to;
string warp_type = "spherical";
int expos_comp_type = ExposureCompensator::GAIN_BLOCKS;
int expos_comp_nr_feeds = 1;
int expos_comp_nr_filtering = 2;
int expos_comp_block_size = 32;
float match_conf = 0.3f;
string seam_find_type = "gc_color";
int blend_type = Blender::MULTI_BAND;
int timelapse_type = Timelapser::AS_IS;
float blend_strength = 5;
string result_name = "F:/opencv/build/bin/sample-data/stitching/result.jpg";
bool timelapse = false;
int range_width = -1;
int main(int argc, char* argv[])
{
#if ENABLE_LOG
int64 app_start_time = getTickCount();
#endif
#if 0
cv::setBreakOnError(true);
#endif
img_names.push_back("F:/opencv/build/bin/sample-data/stitching/st1.jpg");
img_names.push_back("F:/opencv/build/bin/sample-data/stitching/st2.jpg");
img_names.push_back("F:/opencv/build/bin/sample-data/stitching/st3.jpg");
img_names.push_back("F:/opencv/build/bin/sample-data/stitching/st4.jpg");
// Check if have enough images
int num_images = static_cast<int>(img_names.size());
if (num_images < 2)
{
LOGLN("Need more images");
return -1;
}
double work_scale = 1, seam_scale = 1, compose_scale = 1;
bool is_work_scale_set = false, is_seam_scale_set = false, is_compose_scale_set = false;
LOGLN("Finding features...");
#if ENABLE_LOG
int64 t = getTickCount();
#endif
Ptr<Feature2D> finder;
if (features_type == "orb")
{
finder = ORB::create();
}
else if (features_type == "akaze")
{
finder = AKAZE::create();
}
#ifdef HAVE_OPENCV_XFEATURES2D
else if (features_type == "surf")
{
finder = xfeatures2d::SURF::create();
}
else if (features_type == "sift") {
finder = xfeatures2d::SIFT::create();
}
#endif
else
{
cout << "Unknown 2D features type: '" << features_type << "'.
";
return -1;
}
cout << "Current 2D features type: '" << features_type << "'.
";
Mat full_img, img;
vector<ImageFeatures> features(num_images);
vector<Mat> images(num_images);
vector<Size> full_img_sizes(num_images);
double seam_work_aspect = 1;
for (int i = 0; i < num_images; ++i)
{
full_img = imread(samples::findFile(img_names[i]));
full_img_sizes[i] = full_img.size();
if (full_img.empty())
{
LOGLN("Can't open image " << img_names[i]);
return -1;
}
if (work_megapix < 0)
{
img = full_img;
work_scale = 1;
is_work_scale_set = true;
}
else
{
if (!is_work_scale_set)
{
work_scale = min(1.0, sqrt(work_megapix * 1e6 / full_img.size().area()));
is_work_scale_set = true;
}
resize(full_img, img, Size(), work_scale, work_scale, INTER_LINEAR_EXACT);
}
if (!is_seam_scale_set)
{
seam_scale = min(1.0, sqrt(seam_megapix * 1e6 / full_img.size().area()));
seam_work_aspect = seam_scale / work_scale;
is_seam_scale_set = true;
}
computeImageFeatures(finder, img, features[i]);
features[i].img_idx = i;
LOGLN("Features in image #" << i + 1 << ": " << features[i].keypoints.size());
resize(full_img, img, Size(), seam_scale, seam_scale, INTER_LINEAR_EXACT);
images[i] = img.clone();
}
full_img.release();
img.release();
LOGLN("Finding features, time: " << ((getTickCount() - t) / getTickFrequency()) << " sec");
LOG("Pairwise matching");
#if ENABLE_LOG
t = getTickCount();
#endif
vector<MatchesInfo> pairwise_matches;
Ptr<FeaturesMatcher> matcher;
if (matcher_type == "affine")
matcher = makePtr<AffineBestOf2NearestMatcher>(false, try_cuda, match_conf);
else if (range_width == -1)
matcher = makePtr<BestOf2NearestMatcher>(try_cuda, match_conf);
else
matcher = makePtr<BestOf2NearestRangeMatcher>(range_width, try_cuda, match_conf);
(*matcher)(features, pairwise_matches);
matcher->collectGarbage();
LOGLN("Pairwise matching, time: " << ((getTickCount() - t) / getTickFrequency()) << " sec");
// Check if we should save matches graph
if (save_graph)
{
LOGLN("Saving matches graph...");
ofstream f(save_graph_to.c_str());
f << matchesGraphAsString(img_names, pairwise_matches, conf_thresh);
}
// Leave only images we are sure are from the same panorama
vector<int> indices = leaveBiggestComponent(features, pairwise_matches, conf_thresh);
vector<Mat> img_subset;
vector<String> img_names_subset;
vector<Size> full_img_sizes_subset;
for (size_t i = 0; i < indices.size(); ++i)
{
img_names_subset.push_back(img_names[indices[i]]);
img_subset.push_back(images[indices[i]]);
full_img_sizes_subset.push_back(full_img_sizes[indices[i]]);
}
images = img_subset;
img_names = img_names_subset;
full_img_sizes = full_img_sizes_subset;
// Check if we still have enough images
num_images = static_cast<int>(img_names.size());
if (num_images < 2)
{
LOGLN("Need more images from the same panorama");
return -1;
}
Ptr<Estimator> estimator;
if (estimator_type == "affine")
estimator = makePtr<AffineBasedEstimator>();
else
estimator = makePtr<HomographyBasedEstimator>();
vector<CameraParams> cameras;
if (!(*estimator)(features, pairwise_matches, cameras))
{
cout << "Homography estimation failed.
";
return -1;
}
for (size_t i = 0; i < cameras.size(); ++i)
{
Mat R;
cameras[i].R.convertTo(R, CV_32F);
cameras[i].R = R;
LOGLN("Initial camera intrinsics #" << indices[i] + 1 << ":
K:
" << cameras[i].K() << "
R:
" << cameras[i].R);
}
Ptr<detail::BundleAdjusterBase> adjuster;
if (ba_cost_func == "reproj") adjuster = makePtr<detail::BundleAdjusterReproj>();
else if (ba_cost_func == "ray") adjuster = makePtr<detail::BundleAdjusterRay>();
else if (ba_cost_func == "affine") adjuster = makePtr<detail::BundleAdjusterAffinePartial>();
else if (ba_cost_func == "no") adjuster = makePtr<NoBundleAdjuster>();
else
{
cout << "Unknown bundle adjustment cost function: '" << ba_cost_func << "'.
";
return -1;
}
adjuster->setConfThresh(conf_thresh);
Mat_<uchar> refine_mask = Mat::zeros(3, 3, CV_8U);
if (ba_refine_mask[0] == 'x') refine_mask(0, 0) = 1;
if (ba_refine_mask[1] == 'x') refine_mask(0, 1) = 1;
if (ba_refine_mask[2] == 'x') refine_mask(0, 2) = 1;
if (ba_refine_mask[3] == 'x') refine_mask(1, 1) = 1;
if (ba_refine_mask[4] == 'x') refine_mask(1, 2) = 1;
adjuster->setRefinementMask(refine_mask);
if (!(*adjuster)(features, pairwise_matches, cameras))
{
cout << "Camera parameters adjusting failed.
";
return -1;
}
// Find median focal length
vector<double> focals;
for (size_t i = 0; i < cameras.size(); ++i)
{
LOGLN("Camera #" << indices[i] + 1 << ":
K:
" << cameras[i].K() << "
R:
" << cameras[i].R);
focals.push_back(cameras[i].focal);
}
sort(focals.begin(), focals.end());
float warped_image_scale;
if (focals.size() % 2 == 1)
warped_image_scale = static_cast<float>(focals[focals.size() / 2]);
else
warped_image_scale = static_cast<float>(focals[focals.size() / 2 - 1] + focals[focals.size() / 2]) * 0.5f;
if (do_wave_correct)
{
vector<Mat> rmats;
for (size_t i = 0; i < cameras.size(); ++i)
rmats.push_back(cameras[i].R.clone());
waveCorrect(rmats, wave_correct);
for (size_t i = 0; i < cameras.size(); ++i)
cameras[i].R = rmats[i];
}
LOGLN("Warping images (auxiliary)... ");
#if ENABLE_LOG
t = getTickCount();
#endif
vector<Point> corners(num_images);
vector<UMat> masks_warped(num_images);
vector<UMat> images_warped(num_images);
vector<Size> sizes(num_images);
vector<UMat> masks(num_images);
// Preapre images masks
for (int i = 0; i < num_images; ++i)
{
masks[i].create(images[i].size(), CV_8U);
masks[i].setTo(Scalar::all(255));
}
// Warp images and their masks
Ptr<WarperCreator> warper_creator;
#ifdef HAVE_OPENCV_CUDAWARPING
if (try_cuda && cuda::getCudaEnabledDeviceCount() > 0)
{
if (warp_type == "plane")
warper_creator = makePtr<cv::PlaneWarperGpu>();
else if (warp_type == "cylindrical")
warper_creator = makePtr<cv::CylindricalWarperGpu>();
else if (warp_type == "spherical")
warper_creator = makePtr<cv::SphericalWarperGpu>();
}
else
#endif
{
if (warp_type == "plane")
warper_creator = makePtr<cv::PlaneWarper>();
else if (warp_type == "affine")
warper_creator = makePtr<cv::AffineWarper>();
else if (warp_type == "cylindrical")
warper_creator = makePtr<cv::CylindricalWarper>();
else if (warp_type == "spherical")
warper_creator = makePtr<cv::SphericalWarper>();
else if (warp_type == "fisheye")
warper_creator = makePtr<cv::FisheyeWarper>();
else if (warp_type == "stereographic")
warper_creator = makePtr<cv::StereographicWarper>();
else if (warp_type == "compressedPlaneA2B1")
warper_creator = makePtr<cv::CompressedRectilinearWarper>(2.0f, 1.0f);
else if (warp_type == "compressedPlaneA1.5B1")
warper_creator = makePtr<cv::CompressedRectilinearWarper>(1.5f, 1.0f);
else if (warp_type == "compressedPlanePortraitA2B1")
warper_creator = makePtr<cv::CompressedRectilinearPortraitWarper>(2.0f, 1.0f);
else if (warp_type == "compressedPlanePortraitA1.5B1")
warper_creator = makePtr<cv::CompressedRectilinearPortraitWarper>(1.5f, 1.0f);
else if (warp_type == "paniniA2B1")
warper_creator = makePtr<cv::PaniniWarper>(2.0f, 1.0f);
else if (warp_type == "paniniA1.5B1")
warper_creator = makePtr<cv::PaniniWarper>(1.5f, 1.0f);
else if (warp_type == "paniniPortraitA2B1")
warper_creator = makePtr<cv::PaniniPortraitWarper>(2.0f, 1.0f);
else if (warp_type == "paniniPortraitA1.5B1")
warper_creator = makePtr<cv::PaniniPortraitWarper>(1.5f, 1.0f);
else if (warp_type == "mercator")
warper_creator = makePtr<cv::MercatorWarper>();
else if (warp_type == "transverseMercator")
warper_creator = makePtr<cv::TransverseMercatorWarper>();
}
if (!warper_creator)
{
cout << "Can't create the following warper '" << warp_type << "'
";
return 1;
}
Ptr<RotationWarper> warper = warper_creator->create(static_cast<float>(warped_image_scale * seam_work_aspect));
for (int i = 0; i < num_images; ++i)
{
Mat_<float> K;
cameras[i].K().convertTo(K, CV_32F);
float swa = (float)seam_work_aspect;
K(0, 0) *= swa; K(0, 2) *= swa;
K(1, 1) *= swa; K(1, 2) *= swa;
corners[i] = warper->warp(images[i], K, cameras[i].R, INTER_LINEAR, BORDER_REFLECT, images_warped[i]);
sizes[i] = images_warped[i].size();
warper->warp(masks[i], K, cameras[i].R, INTER_NEAREST, BORDER_CONSTANT, masks_warped[i]);
}
vector<UMat> images_warped_f(num_images);
for (int i = 0; i < num_images; ++i)
images_warped[i].convertTo(images_warped_f[i], CV_32F);
LOGLN("Warping images, time: " << ((getTickCount() - t) / getTickFrequency()) << " sec");
LOGLN("Compensating exposure...");
#if ENABLE_LOG
t = getTickCount();
#endif
Ptr<ExposureCompensator> compensator = ExposureCompensator::createDefault(expos_comp_type);
if (dynamic_cast<GainCompensator*>(compensator.get()))
{
GainCompensator* gcompensator = dynamic_cast<GainCompensator*>(compensator.get());
gcompensator->setNrFeeds(expos_comp_nr_feeds);
}
if (dynamic_cast<ChannelsCompensator*>(compensator.get()))
{
ChannelsCompensator* ccompensator = dynamic_cast<ChannelsCompensator*>(compensator.get());
ccompensator->setNrFeeds(expos_comp_nr_feeds);
}
if (dynamic_cast<BlocksCompensator*>(compensator.get()))
{
BlocksCompensator* bcompensator = dynamic_cast<BlocksCompensator*>(compensator.get());
bcompensator->setNrFeeds(expos_comp_nr_feeds);
bcompensator->setNrGainsFilteringIterations(expos_comp_nr_filtering);
bcompensator->setBlockSize(expos_comp_block_size, expos_comp_block_size);
}
compensator->feed(corners, images_warped, masks_warped);
LOGLN("Compensating exposure, time: " << ((getTickCount() - t) / getTickFrequency()) << " sec");
LOGLN("Finding seams...");
#if ENABLE_LOG
t = getTickCount();
#endif
Ptr<SeamFinder> seam_finder;
if (seam_find_type == "no")
seam_finder = makePtr<detail::NoSeamFinder>();
else if (seam_find_type == "voronoi")
seam_finder = makePtr<detail::VoronoiSeamFinder>();
else if (seam_find_type == "gc_color")
{
#ifdef HAVE_OPENCV_CUDALEGACY
if (try_cuda && cuda::getCudaEnabledDeviceCount() > 0)
seam_finder = makePtr<detail::GraphCutSeamFinderGpu>(GraphCutSeamFinderBase::COST_COLOR);
else
#endif
seam_finder = makePtr<detail::GraphCutSeamFinder>(GraphCutSeamFinderBase::COST_COLOR);
}
else if (seam_find_type == "gc_colorgrad")
{
#ifdef HAVE_OPENCV_CUDALEGACY
if (try_cuda && cuda::getCudaEnabledDeviceCount() > 0)
seam_finder = makePtr<detail::GraphCutSeamFinderGpu>(GraphCutSeamFinderBase::COST_COLOR_GRAD);
else
#endif
seam_finder = makePtr<detail::GraphCutSeamFinder>(GraphCutSeamFinderBase::COST_COLOR_GRAD);
}
else if (seam_find_type == "dp_color")
seam_finder = makePtr<detail::DpSeamFinder>(DpSeamFinder::COLOR);
else if (seam_find_type == "dp_colorgrad")
seam_finder = makePtr<detail::DpSeamFinder>(DpSeamFinder::COLOR_GRAD);
if (!seam_finder)
{
cout << "Can't create the following seam finder '" << seam_find_type << "'
";
return 1;
}
seam_finder->find(images_warped_f, corners, masks_warped);
LOGLN("Finding seams, time: " << ((getTickCount() - t) / getTickFrequency()) << " sec");
// Release unused memory
images.clear();
images_warped.clear();
images_warped_f.clear();
masks.clear();
LOGLN("Compositing...");
#if ENABLE_LOG
t = getTickCount();
#endif
Mat img_warped, img_warped_s;
Mat dilated_mask, seam_mask, mask, mask_warped;
Ptr<Blender> blender;
Ptr<Timelapser> timelapser;
//double compose_seam_aspect = 1;
double compose_work_aspect = 1;
for (int img_idx = 0; img_idx < num_images; ++img_idx)
{
LOGLN("Compositing image #" << indices[img_idx] + 1);
// Read image and resize it if necessary
full_img = imread(samples::findFile(img_names[img_idx]));
if (!is_compose_scale_set)
{
if (compose_megapix > 0)
compose_scale = min(1.0, sqrt(compose_megapix * 1e6 / full_img.size().area()));
is_compose_scale_set = true;
// Compute relative scales
//compose_seam_aspect = compose_scale / seam_scale;
compose_work_aspect = compose_scale / work_scale;
// Update warped image scale
warped_image_scale *= static_cast<float>(compose_work_aspect);
warper = warper_creator->create(warped_image_scale);
// Update corners and sizes
for (int i = 0; i < num_images; ++i)
{
// Update intrinsics
cameras[i].focal *= compose_work_aspect;
cameras[i].ppx *= compose_work_aspect;
cameras[i].ppy *= compose_work_aspect;
// Update corner and size
Size sz = full_img_sizes[i];
if (std::abs(compose_scale - 1) > 1e-1)
{
sz.width = cvRound(full_img_sizes[i].width * compose_scale);
sz.height = cvRound(full_img_sizes[i].height * compose_scale);
}
Mat K;
cameras[i].K().convertTo(K, CV_32F);
Rect roi = warper->warpRoi(sz, K, cameras[i].R);
corners[i] = roi.tl();
sizes[i] = roi.size();
}
}
if (abs(compose_scale - 1) > 1e-1)
resize(full_img, img, Size(), compose_scale, compose_scale, INTER_LINEAR_EXACT);
else
img = full_img;
full_img.release();
Size img_size = img.size();
Mat K;
cameras[img_idx].K().convertTo(K, CV_32F);
// Warp the current image
warper->warp(img, K, cameras[img_idx].R, INTER_LINEAR, BORDER_REFLECT, img_warped);
// Warp the current image mask
mask.create(img_size, CV_8U);
mask.setTo(Scalar::all(255));
warper->warp(mask, K, cameras[img_idx].R, INTER_NEAREST, BORDER_CONSTANT, mask_warped);
// Compensate exposure
compensator->apply(img_idx, corners[img_idx], img_warped, mask_warped);
img_warped.convertTo(img_warped_s, CV_16S);
img_warped.release();
img.release();
mask.release();
dilate(masks_warped[img_idx], dilated_mask, Mat());
resize(dilated_mask, seam_mask, mask_warped.size(), 0, 0, INTER_LINEAR_EXACT);
mask_warped = seam_mask & mask_warped;
if (!blender && !timelapse)
{
blender = Blender::createDefault(blend_type, try_cuda);
Size dst_sz = resultRoi(corners, sizes).size();
float blend_width = sqrt(static_cast<float>(dst_sz.area())) * blend_strength / 100.f;
if (blend_width < 1.f)
blender = Blender::createDefault(Blender::NO, try_cuda);
else if (blend_type == Blender::MULTI_BAND)
{
MultiBandBlender* mb = dynamic_cast<MultiBandBlender*>(blender.get());
mb->setNumBands(static_cast<int>(ceil(log(blend_width) / log(2.)) - 1.));
LOGLN("Multi-band blender, number of bands: " << mb->numBands());
}
else if (blend_type == Blender::FEATHER)
{
FeatherBlender* fb = dynamic_cast<FeatherBlender*>(blender.get());
fb->setSharpness(1.f / blend_width);
LOGLN("Feather blender, sharpness: " << fb->sharpness());
}
blender->prepare(corners, sizes);
}
else if (!timelapser && timelapse)
{
timelapser = Timelapser::createDefault(timelapse_type);
timelapser->initialize(corners, sizes);
}
// Blend the current image
if (timelapse)
{
timelapser->process(img_warped_s, Mat::ones(img_warped_s.size(), CV_8UC1), corners[img_idx]);
String fixedFileName;
size_t pos_s = String(img_names[img_idx]).find_last_of("/\");
if (pos_s == String::npos)
{
fixedFileName = "fixed_" + img_names[img_idx];
}
else
{
fixedFileName = "fixed_" + String(img_names[img_idx]).substr(pos_s + 1, String(img_names[img_idx]).length() - pos_s);
}
imwrite(fixedFileName, timelapser->getDst());
}
else
{
blender->feed(img_warped_s, mask_warped, corners[img_idx]);
}
}
if (!timelapse)
{
Mat result, result_mask;
blender->blend(result, result_mask);
LOGLN("Compositing, time: " << ((getTickCount() - t) / getTickFrequency()) << " sec");
imwrite(result_name, result);
}
LOGLN("Finished, total time: " << ((getTickCount() - app_start_time) / getTickFrequency()) << " sec");
return 0;
}
结果:
Finding features... Current 2D features type: 'surf'. [ INFO:0] Initialize OpenCL runtime... Features in image #1: 911 Features in image #2: 1085 Features in image #3: 1766 Features in image #4: 2001 Finding features, time: 3.33727 sec Pairwise matchingPairwise matching, time: 3.2849 sec Initial camera intrinsics #1: K: [4503.939581818162, 0, 285; 0, 4503.939581818162, 210; 0, 0, 1] R: [1.0011346, 0.0019526235, -0.0037489906; 0.00011878588, 1.0000151, -0.052518897; -0.0011389133, 0.021224562, 1] Initial camera intrinsics #2: K: [4503.939581818162, 0, 249; 0, 4503.939581818162, 222; 0, 0, 1] R: [1.0023992, 0.0045258515, 0.083801955; -9.7107059e-06, 1.0006112, -0.049870808; 0.015923418, 0.048128795, 1.0000379] Initial camera intrinsics #3: K: [4503.939581818162, 0, 302.5; 0, 4503.939581818162, 173.5; 0, 0, 1] R: [1, 0, 0; 0, 1, 0; 0, 0, 1] Initial camera intrinsics #4: K: [4503.939581818162, 0, 274.5; 0, 4503.939581818162, 194.5; 0, 0, 1] R: [1.0004042, 0.00080040237, 0.078620218; 0.00026136645, 1.0005095, -0.0048735617; 0.0061902963, 0.0096427174, 1.0004393] Camera #1: K: [6569.821976030652, 0, 285; 0, 6569.821976030652, 210; 0, 0, 1] R: [0.99999672, 0.00038595949, -0.0025201384; -0.00047636221, 0.99935275, -0.035969362; 0.0025046244, 0.035970442, 0.99934971] Camera #2: K: [6571.327169846625, 0, 249; 0, 6571.327169846625, 222; 0, 0, 1] R: [0.99835128, 0.0012797765, 0.057385404; 0.00068109832, 0.99941689, -0.03413773; -0.05739563, 0.034120534, 0.99776828] Camera #3: K: [6570.486320822205, 0, 302.5; 0, 6570.486320822205, 173.5; 0, 0, 1] R: [1, -1.2951205e-09, 0; -1.2914825e-09, 1, 0; 0, -4.6566129e-10, 1] Camera #4: K: [6571.394840241929, 0, 274.5; 0, 6571.394840241929, 194.5; 0, 0, 1] R: [0.99855018, -0.00018820527, 0.053829439; 0.0003683792, 0.99999434, -0.0033372282; -0.053828511, 0.0033522192, 0.99854457] Warping images (auxiliary)... [ INFO:0] Successfully initialized OpenCL cache directory: C:UsersmzhuAppDataLocalTempopencv4.1opencl_cache [ INFO:0] Preparing OpenCL cache configuration for context: Intel_R__Corporation--Intel_R__HD_Graphics_620--21_20_16_4574 Warping images, time: 0.0817463 sec Compensating exposure... Compensating exposure, time: 0.22982 sec Finding seams... Finding seams, time: 1.49795 sec Compositing... Compositing image #1 Multi-band blender, number of bands: 5 Compositing image #2 Compositing image #3 Compositing image #4 Compositing, time: 0.705931 sec Finished, total time: 116.51 sec

OpenPano: Automatic Panorama Stitching From Scratch (https://github.com/ppwwyyxx/OpenPano)
StitchIt: Optimization and Parallelization of Image Stitching (https://github.com/stitchit/StitchIt)
ParaPano: Parallel image stitching using CUDA (https://github.com/zq-chen/ParaPano)
NISwGSP : Natural Image Stitching with the Global Similarity Prior (For Windows:https://github.com/firdauslubis88/NISwGSP,论文阅读笔记:https://zhuanlan.zhihu.com/p/57543736)
推荐:
图像拼接现在还有研究的价值吗?有哪些可以研究的点?现在技术发展如何?