一、安装
1.下载软件包pyserial-2.7.tar.gz 网址:https://pypi.python.org/pypi/pyserial
2.8uftp上传至/usr/local/src/目录下
3.cd /usr/local/src/
4.解压tar -zxvf pyserial-2.7.tar.gz
5.cd pyserial-2.7/ //在该解压后的文件里发现setup.py文件,而没有configrue文件,所以,
//下一步用sudo python setup.py install,而不是./configrue --prefix=/usr.....
6.安装sudo python setup.py install
注:网上还有如下方法编译安装pyserial
cd /usr/local/src/
wget http://pypi.python.org/packages/source/p....... //用wget直接下载到当地当前目录下
tar -zxvf pyserial-2.4.tar.gz
cd pyserial-2.4
python2.6 setup.py install
二、使用
import serial导入模块
然后就可以用了
ser = serial.Serial(0) 是打开第一个串口
print ser.portstr 能看到第一个串口的标识,windows下是COM1
ser.write(“hello") 就是往串口里面写数据
ser.close() 就是关闭ser表示的串口
ser.open() 会打开这个串口
ser = serial.Serial('COM1', 115200) 来设置波特率,当然还有专门的函数
data = ser.read()可以读一个字符
data = ser.read(20) 是读20个字符
data = ser.readline() 是读一行,以/n结束,要是没有/n就一直读,阻塞。
data = ser.readlines()和ser.xreadlines()都需要设置超时时间
ser.baudrate = 9600 设置波特率
ser 来查看当前串口的状态
ser.isOpen() 看看这个串口是否已经被打开
三、树莓派串口UART(转载,原文:http://blog.csdn.net/xukai871105/article/details/22713925)
0.前言


- # -*- coding: utf-8 -*
- import serial
- import time
- # 打开串口
- ser = serial.Serial("/dev/ttyAMA0", 9600)
- def main():
- while True:
- # 获得接收缓冲区字符
- count = ser.inWaiting()
- if count != 0:
- # 读取内容并回显
- recv = ser.read(count)
- ser.write(recv)
- # 清空接收缓冲区
- ser.flushInput()
- # 必要的软件延时
- time.sleep(0.1)
- if __name__ == '__main__':
- try:
- main()
- except KeyboardInterrupt:
- if ser != None:
- ser.close()
raspberry pi 串口控制51单片机
制作小车都用raspberry pi上的口有些麻烦,所以把一些基础控制给51单片机解决,raspberry pi控制高层应用。所以测试一下raspberry pi串口连接调试51单片机。
第一步: //我自己第一步:sudo apt-get install pyserial(python的串口模块)
sudo apt-get install python-serial
sudo easy_install pyserial
第二部接线部分图 //我自己这一排依次接:单片机的+5v、悬空、单片机的地、单片机的RXD、单片机的TXD。
raspberry pi板子串口接线图
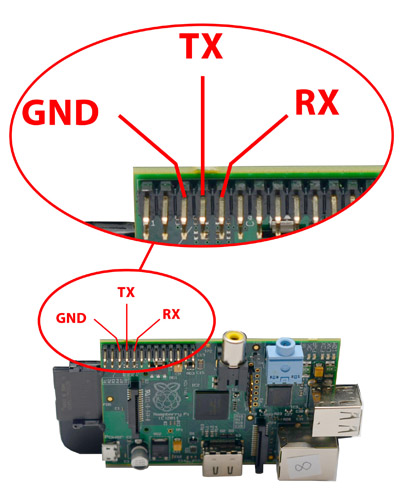
raspberry 串口接线图1
杜邦线连接

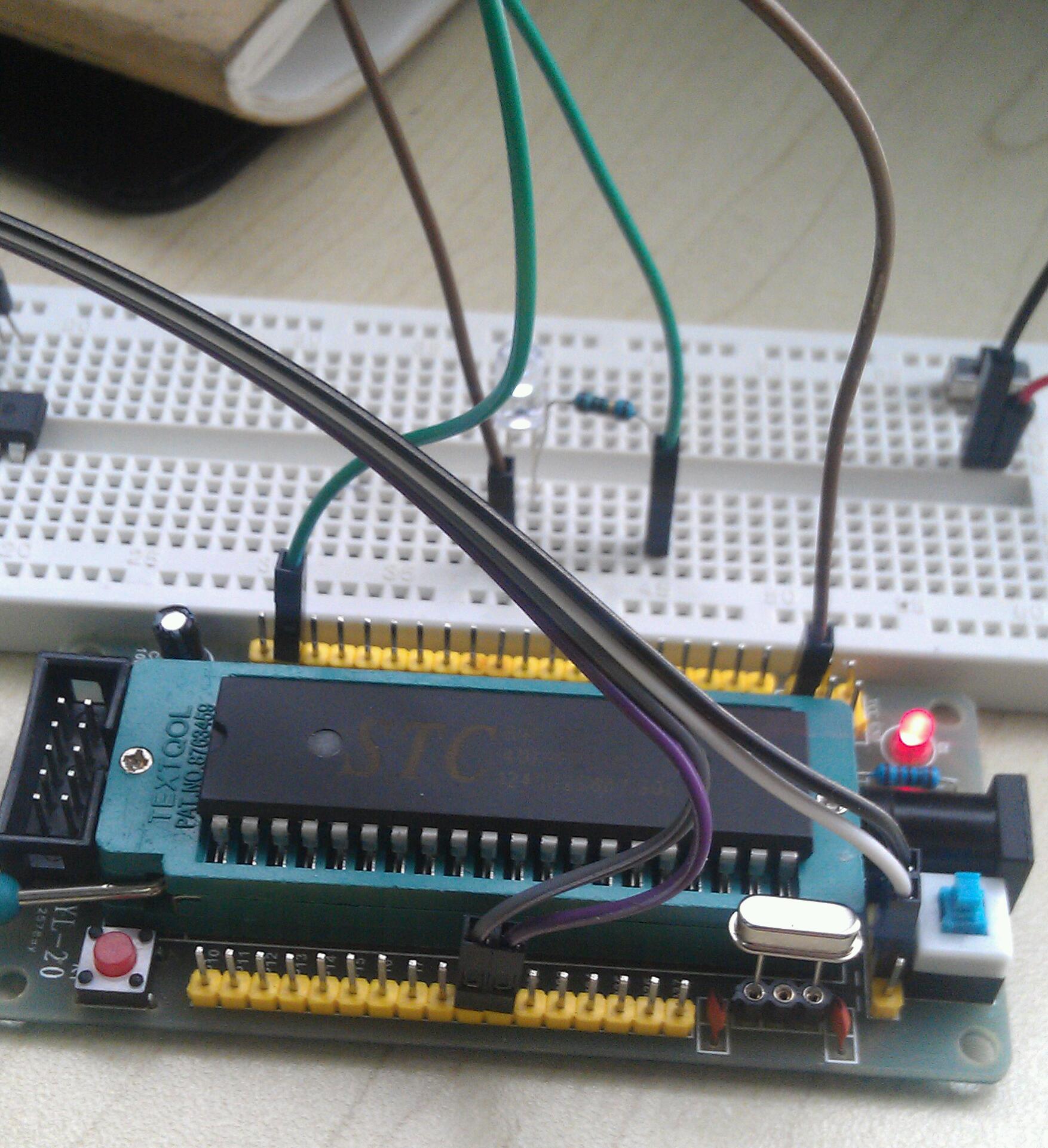
raspberry 串口接线图3
//#tstlist=[22,8,8,3,3,3]
//tstlist=[i]
//ser.write(tstlist[:])
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
|
#!/bin/env python# -*- coding:utf-8 -*-# -------------------------------# Filename: # Revision: # Date: 2013-02-5# Author: simonzhang# Email: simon-zzm@163.com# WWW: www.simonzhang.net# -------------------------------import serialimport time#### 定义小灯亮灭初始值i = 0#### 实例化串口ser = serial.Serial('/dev/ttyAMA0', 9600, timeout = 0.5)for j in range(10): if ser.isOpen() == False: ser.open() #### 每次循环对上值次取反 if i == 0: i = 1 else: i = 0 #### 向串口发送字符 ser.write(chr(i)) #### 获取串口返回值 #### linux为福阻塞模式,在阻塞模式下 #### 会报错,所以抱起来就好了。 try: re = ser.readlines() except: pass print re time.sleep(2) |
#tstlist=[22,8,8,3,3,3]
tstlist=[i]
ser.write(tstlist[:])。更重要的是解决问题的思路:当运行错误的时候,会提示在库函数里面具体哪个函数出错了,是to_bytes(data)函数,仔细解读这个函数发现它是将所给参数(是序列)转换为字符,在程序的注释部分也有说明,于是想到先把参数转化为序列再给ser.write(...)函数,解决问题。思路:去库函数具体出错的函数处分析原因。
/************其他人的解决办法***************/
ser=serial.Serial(6,115200)#这里没有问题
at='at'+chr(13)
ser.write(at)
让后马上就报错了.
File "C:Python33libsite-packagesserialserialutil.py", line 76, in to_bytes
b.append(item) # this one handles int and str for our emulation and ints for Python 3.x
TypeError: an integer is required
某人回复:3的字符串都是unicode,发送前是不是要encoding成别的编码?
楼主修改:at='AT' at=at+chr(13) at.encode('ascii')
/***************************************/
51单片机代码:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
|
#include <reg52.h>#include <intrins.h>typedef unsigned char uint8;typedef unsigned int uint16;uint8 num;sbit D0 = P0^0;void init(){ SCON = 0x50; TMOD = 0x20; TH1 = 0xFD; TL1 = 0xFD; TR1 = 1; //打开定时器 ES = 1; EA = 1; //打开总开关}void interrupt_uart() interrupt 4{ if(TI) { TI = 0; REN = 1; } if(RI) { RI = 0; num = SBUF; if (num == 1) { D0 = 0; SBUF = 0; } else { D0 = 1; SBUF =1; } REN = 0; }}main(){ init(); while(1);} |
源码下载
raspberrypito51
五、pyserial解析:
1.serial.Serial的参数有哪些:
>>> import serial
>>> ser=serial.Serial("/dev/ttyAMA0",9600)
>>> ser
Serial<id=0xb6afc6b0, open=True>(port='/dev/ttyAMA0', baudrate=9600, bytesize=8, parity='N', stopbits=1, timeout=None, xonxoff=False, rtscts=False, dsrdtr=False)
2.pyserial官网文档地址:pyserial.sourceforge.net
- timeout = None: wait forever
- timeout = 0: non-blocking mode (return immediately on read)
- timeout = x: set timeout to x seconds (float allowed)