1.从U盘安装Ubuntu系统
2.中文输入法
system setting => text entry => input sources to use 选择+号,添加之前安装的中文输入法。(然后属性1,2,2,1)
3.安装ROS系统
(4.gazebao安装,默认已安装)
3.update,upgrade
4.手柄驱动测试
1).ls -l /dev/input/js0
2).sudo apt-get install joystick(安装)
3).sudo jstest /dev/input/js0
4). sudo apt-get install ros-indigo-joy(安装)
5).roscore
6).rosrun joy joy_node
7).rostopic echo joy
5.pyserial包 (命令行安装sudo apt-get install python-serial)
解压tar -zxvf pyserial-2.7.tar.gz
cd pyserial-2.7/ //在该解压后的文件里发现setup.py文件,而没有configrue文件,所以,
//下一步用sudo python setup.py install,而不是./configrue --prefix=/usr.....
sudo python setup.py install
6.串口权限:(如果在运行程序时提示串口没有权限)
1. 查看ttyS0隶属的组:ls -l /dev/ttyS* //发现隶属于dialout组
输出: crw-rw---- 1 root dialout 4, 64 9月 9 08:23 /dev/ttyS0
查看用户(如robot2)隶属的组别:groups robot2 //查看wang用户所在的组,以及组内成员发现没有dialout组。
(注:通过文件/etc/group可以查看所有组及robot2隶属的组,命令:sudu nano /etc/group)
输出: wang : wang adm cdrom sudo dip plugdev lpadmin sambashare
2. 用户robot2没有隶属于dialout组别,所以不能操作ttyS*串口,应将robot2用户加入tty组:sudo gpasswd --add robot2 dialout
然后groups robot2 //可以看到多了dialout
3.重启 或logout退出系统(注销),login登陆。
7.Qt安装
下载qt-opensource-linux-x86-5.4.0.run
chmod 777 qt.....run
./qt...run
cd .local/share/applicatins/
sudo gedit DigiaQt_qtcreator_community.desktop
Exec=bash空-i空-c空/home/...
bzrobot_xml : CmakeList.txt
18:("/home/wang/Qt5.4.0/5.4/gcc") #qt的安装路径
8.拷贝系统程序,catkin_make
1.sudo apt-get install ros-indigo-move-base
2.chmod 777 /home/robot2/bzrobot_ws/src/bzrobot/bzrobot_control/bzrobot_control/bzrobot_cmd_vel_mux/cfg/reload.cfg
nano .bashrc
.bashrc文件包含的路径如下:
source /opt/ros/indigo/setup.bash
source /home/robot2/bzrobot_ws/devel/setup.bash (sudo echo "source /home/wang/bzrobot_ws/devel/setup.bash">>.bashrc)
source /usr/share/gazebo/setup.sh
source .bashrc
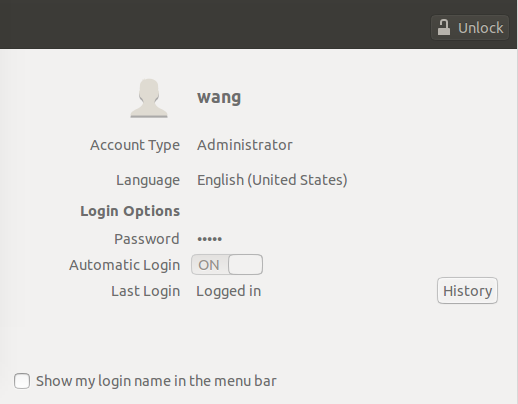
9.跳过开机输入密码项设置:
在“System Settings”里,点击“User Accounts”,然后unlock如下:
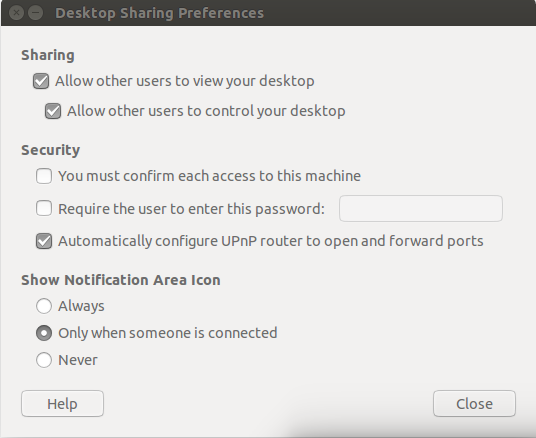
10.开机自动远程登录
主机:在搜索端搜索desktop sharing,然后如下设置后退出
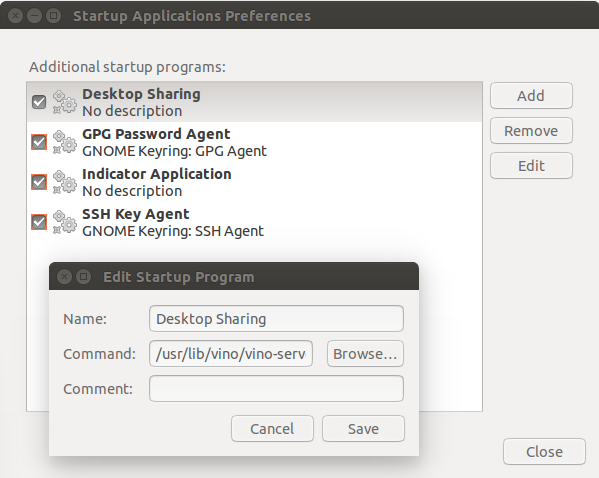
打开Startup Applications,如下图所示,然后点击Add,做如图2设置.这样就可以开机自启动Desktop Sharing了
客服端:
1.在搜索端搜索remmina remote desktop client
2.如图设置:server填作为服务器电脑的IP地址

11.分布式节点设置
1.从sudo gedit /etc/hosts
192.168.3.102 robot2
export ROS_MASTER_URI=”http://wool:11311”
2.主sudo gedit /etc/hosts
192.168.3.155 wang
192.168.3.156 han
12.安装openni //jade版本没有如下包
sudo apt-get install ros-indigo-openni-camera
sudo apt-get install ros-indigo-openni-launch
13.单个ubuntu系统开机需要enter键问题的解决:
。。。
sudo apt-get install ros-indigo-navigation
sudo apt-get install ros-indigo-slam-gmapping