可以利用Eclipse集成开发环境进行ROS开发,从而提高研发效率。以色列巴尔伊兰大学的Mr. Roi Yehoshua开设了一门ROS课程,课程2( Lesson 2)讲解了如何利用Eclipse在ROS上进行开发。这里走下总结整理。安装步骤如下:
1. 安装Java8
我们采用Eclipse Neon版本的IDE,所以需要Java8的运行环境,下面为安装Java8的命令,如下所示:
sudo add-apt-repository ppa:webupd8team/java
sudo apt-get update
sudo apt-get install oracle-java8-installer
sudo apt-get install oracle-java8-set-default
2. 安装Eclipse Neon
- 确保Java虚拟机JVM已经安装,如果没有安装,在终端执行以下的命令:
$sudo apt-get install default-jre
- 下载Eclipse IDE for C/C++开发平台:
----下载地址:http://www.eclipse.org/downloads/
----最新的Eclipse Neon版本为:eclipse-cpp-neon-1a-linux-gtk-x86_64.tar.gz
- 解压Eclipse到你指定的文件夹中。
- 在终端中,将Eclipse移到系统的目录 /opt,执行如下命令:
$sudo mv eclipse /opt
- 创建一个链接,以给所有的用户可以使用,执行如下命令:
$sudo ln -s /opt/eclipse/eclipse /usr/bin/eclipse
- 为了方便,弄个Eclipse的快捷方式到桌面
$sudo gedit /usr/share/applications/eclipse.desktop
添加如下内容:
[Desktop Entry] Name=Eclipse Type=Application Exec=bash -i -c "/opt/eclipse/eclipse" Terminal=false Icon=/opt/eclipse/icon.xpm Comment=Integrated Development Environment NoDisplay=false Categories=Development;IDE Name[en]=eclipse.desktop
–The bash –i - c command will cause your IDE's launcher icon to load your ROS-sourced shell environment before launching eclipse
3. 生成Eclipse项目文件
- 创建工作空间,执行如下代码:
$ mkdir -p ~/catkin_ws/src $ cd ~/catkin_ws/src $ catkin_init_workspace
$ cd ~/catkin_ws
$ catkin_make
- 创建一个包first_pkg,执行如下代码:
$ cd ~/catkin_ws/src
$ catkin_create_pkg first_pkg std_msgs rospy roscpp
- 到catkin的工作空间,利用catkin_make命令,建立一个eclipse的项目,命令如下:
$ cd ~/catkin_ws $ catkin_make --force-cmake -G"Eclipse CDT4 - Unix Makefiles"
- 项目的文件声称在目录 ~/catkin_ws/build里。
4. 导入项目
- 启动 Eclipse
- 选择catkin_ws 文件夹作为工作空间文件夹:
- 选择File --> Import --> General --> Existing Projects into Workspace

- 从文件夹~/catkin_ws/build中导入项目

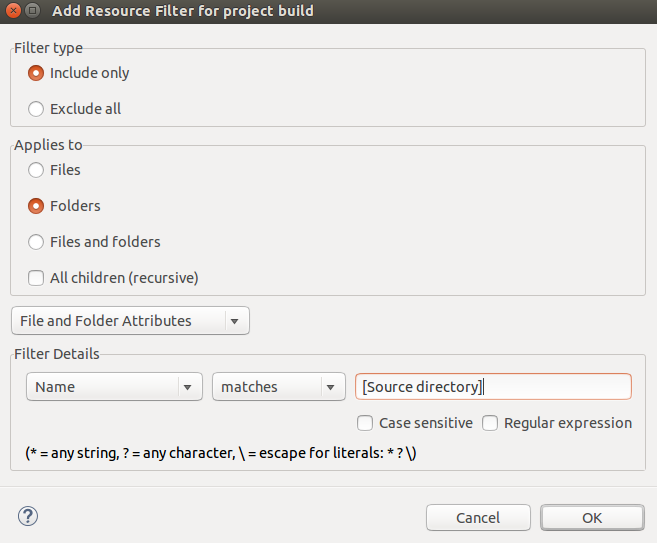
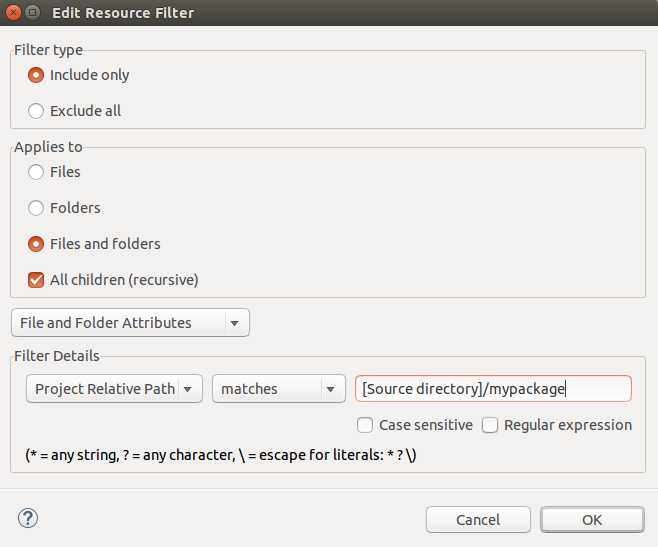
- 剔除没必要的目录。如果项目比较大,整个项目浏览器会比较的繁杂,为了让项目浏览更简洁,我们做些设置。右击项目build,选择Properties -> Resource,添加一个资源过滤器,如下图所示进行填写。然后选择ok,并应用即可。
5. 添加预编译头文件的路径
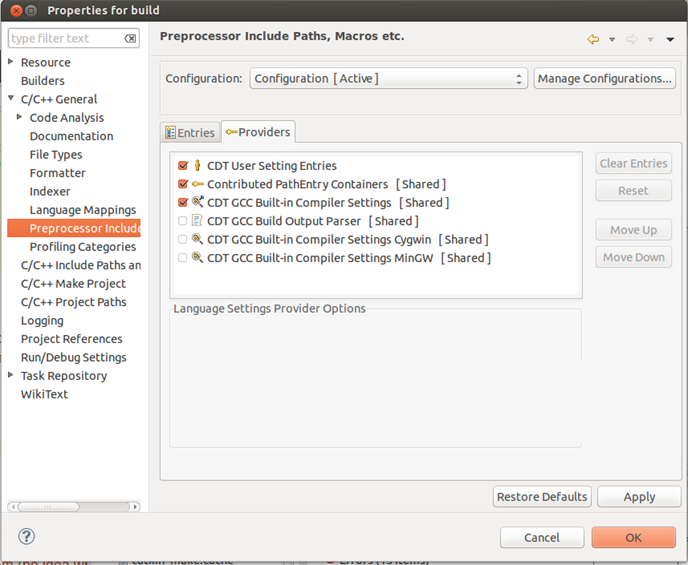
- 默认情况下,Eclipse是不会只能识别到ROS的头文件信息的,为了修复它,作如下操作进行设置:
–到 Project Properties --> C/C++ General --> Preprocessor Include Paths, Macros, etc. --> Providers tab
–检查CDT GCC Built-in Compiler Settings [Shared]
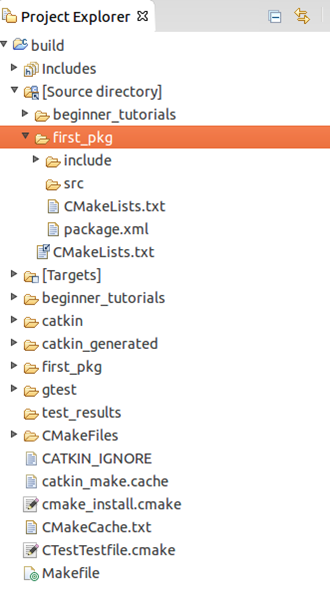
6. 项目结构
- 项目的源文件在文件夹 "Source directory"中,开发者可以在这个目录下添加源代码。
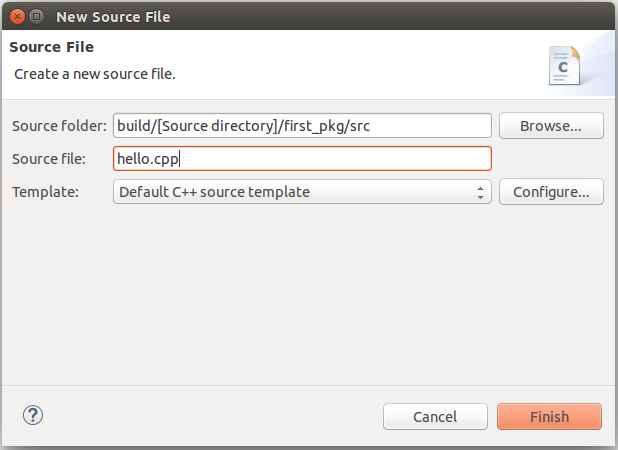
7. 添加项目文件
- 右击src,然后选择New –> Source File, 创建文件 hello.cpp,如下图所示:
小技巧,Eclipse自动补齐代码快捷键:Ctrl+Space
编写如下代码:
#include "ros/ros.h" int main(int argc, char **argv) { ros::init(argc, argv, "hello"); ros::NodeHandle nh; ros::Rate loop_rate(10); int count = 0; while (ros::ok()) // Keep spinning loop until user presses Ctrl+C { ROS_INFO_STREAM("hello world" << count); ros::spinOnce(); // Allow ROS to process incoming messages loop_rate.sleep(); // Sleep for the rest of the cycle count++; }
return 0; }
8. 编译节点
- 在编译前,需要在包的CMakeLists.txt文件中添加新的编译内容(红色部分),如下所示:
cmake_minimum_required(VERSION 2.8.3) project(first_pkg) ## Find catkin macros and libraries find_package(catkin REQUIRED COMPONENTS roscpp rospy std_msgs) ## Declare ROS messages and services # add_message_files(FILES Message1.msg Message2.msg) # add_service_files(FILES Service1.srv Service2.srv) ## Generate added messages and services # generate_messages(DEPENDENCIES std_msgs) ## Declare catkin package catkin_package() ## Specify additional locations of header files include_directories(${catkin_INCLUDE_DIRS}) ## Declare a cpp executable add_executable(hello src/hello.cpp) ## Specify libraries to link a library or executable target against target_link_libraries(hello ${catkin_LIBRARIES})
- 按快捷键 Ctrl-B,编译项目
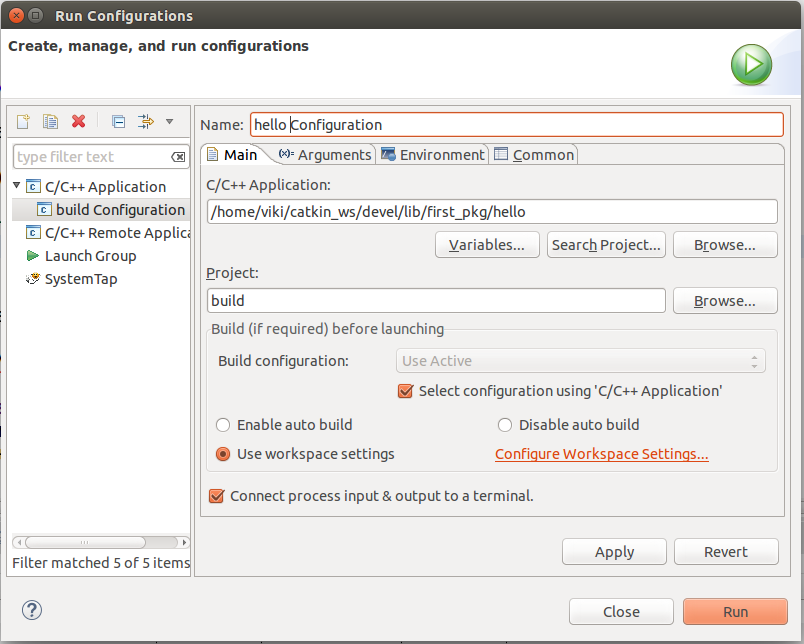
9. 在Eclipse中运行节点
- 创建新的启动配置,点击 Run --> Run configurations... --> C/C++ Application (double click or click on New)。
- 选择相应的二进制执行程序 (use the Browse… button),如本例程的执行程序为:~/catkin_ws/devel/lib/first_pkg/hello。
- 确保roscore已经在终端中运行。
- 点击Run,结果如下图所示:
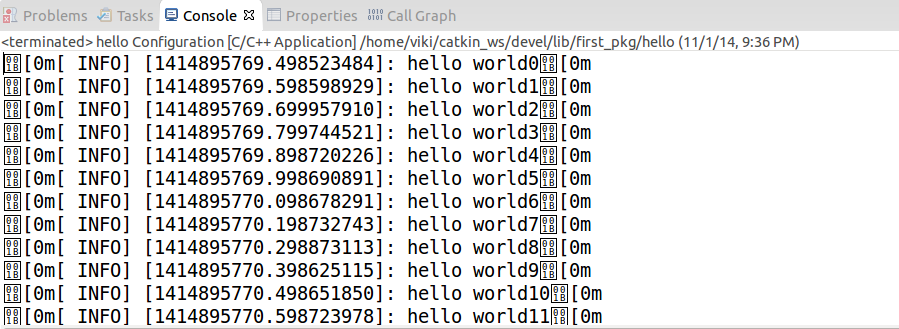
当然也可以在终端中运行。
10. 在Eclipse中调试
- 为了调试,你需要将编译器设置为调试模式,终端中,到catkin_ws/build目录执行如下代码:
$ cmake ../src -DCMAKE_BUILD_TYPE=Debug
- 重启Eclipse
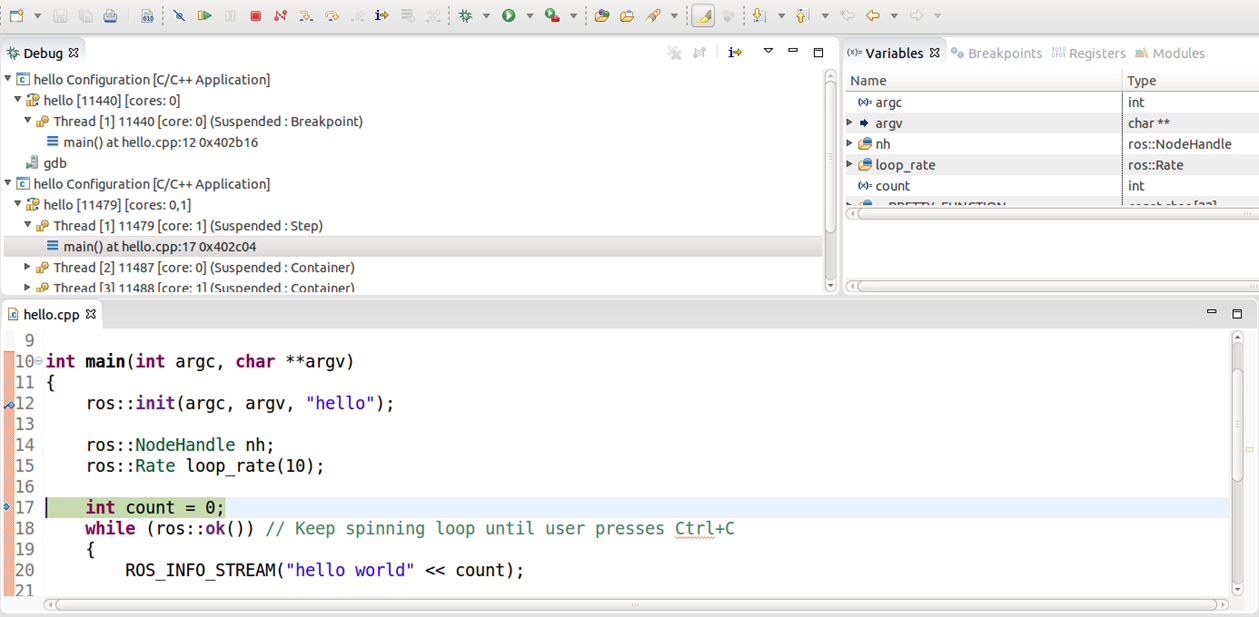
- 这样就可以利用Eclipse的调试工具进行调试了,进入调试界面,如下图所示:
参考资料:
[2].Lesson 2