参考网址:https://wenku.baidu.com/view/08833045d15abe23482f4da4.html
经典ICP算法右如下7个步骤:
(1)根据带匹配的点集合P={P1, P2, P3,...,Pn}的点坐标,在模板数据点集合S={S1, S2,S3,...,}中搜索相应最近点的集Q={q1, q2,...,qn}。
ICP算法假设带匹配的两组扫描数据是完全重叠的,但是激光测距仪所测的数据是离散的,对应点之间并没有十分严格的匹配。因此,为了增加有效点的重叠部分,并且缩短计算时间,选取激光测距仪扫描一轮所测所测数据的正前方120度范围的数据点作为待匹配数据的点集P。
根据待匹配数据点集P中的数据点pi去搜索模板点集S中与该点最近的一点保存为qi。
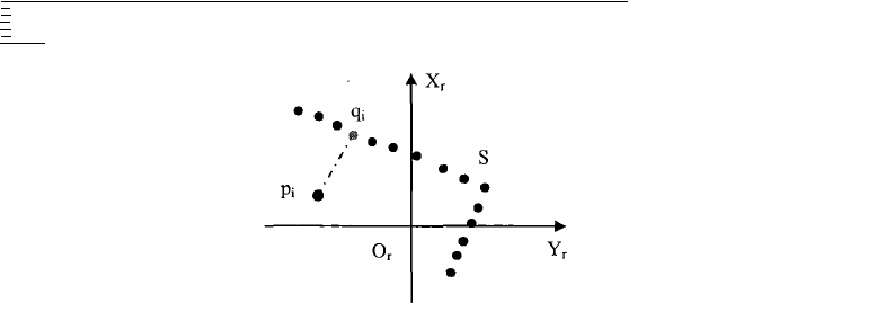
图1 临近点搜索
两点之间的距离平方和为dis。
其中,qj遍历整个点集S,通过不断地比较,找到最近的点,根据该点序列号保存在点集Q中,记为qi。
(2)算两个点集P、Q的重心位置坐标,并进行点集中心化,生成新的点集。
计算两个点集合P、Q的重心位置坐标,即所有横坐标和取平均,所有纵坐标和取平均,得到P、Q的重心坐标d(x,y),m(x,y)
将点集P、Q中所有点坐标扣除各自集合的重心坐标,得到对应的新的点集D、M;
(3)由新的点集计算协方差矩阵,并求解由它组成的一个四元数矩阵的最大特征值及其最大特征向量。(协方差矩阵见本博客其他篇章)
定义一个矩阵A和T。。。
定义四元素矩阵B。。。(怎么插入公式呢?)
求解旋转矩阵,找到四元素矩阵对应的最大特征值和对应的特征向量
(4)由于最大特征向量等价于残差平方和最小时的旋转四元素,将四元素转换为旋转矩阵R;
(5)旋转矩阵R被确定后,由评议向量T仅仅是两个点集的重心差异,可以通过两个坐标系中的中心点和旋转矩阵确定。
(6)将带匹配数据点集P按照计算的旋转矩阵R和平移矩阵T变换后形成新的点集P,通过新的点集P与与模板的临近点集Q计算所有对应点距离平方和值除以数据点总数的值I作为迭代判断数值。
(7)当迭代判断数值I小于阈值时,ICP配准算法就停止跌打,否则重复(1)至(6)步。
这就是所有的过程了!
可以参考的一些文章https://www.cnblogs.com/wangguchangqing/p/8287585.html