PPT 可以说是讲得相当之清楚了。。。

中文翻译:
https://zhuanlan.zhihu.com/p/24916786
图解YOLO
YOLO核心思想:从R-CNN到Fast R-CNN一直采用的思路是proposal+分类 (proposal 提供位置信息, 分类提供类别信息)精度已经很高,但是速度还不行。 YOLO提供了另一种更为直接的思路: 直接在输出层回归bounding box的位置和bounding box所属的类别(整张图作为网络的输入,把 Object Detection 的问题转化成一个 Regression 问题)。
YOLO的主要特点:
- 速度快,能够达到实时的要求。在 Titan X 的 GPU 上 能够达到 45 帧每秒。
- 使用全图作为 Context 信息,背景错误(把背景错认为物体)比较少。
- 泛化能力强。
大致流程:
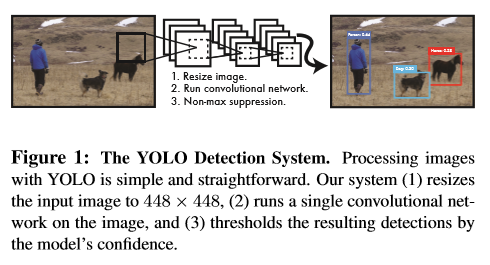
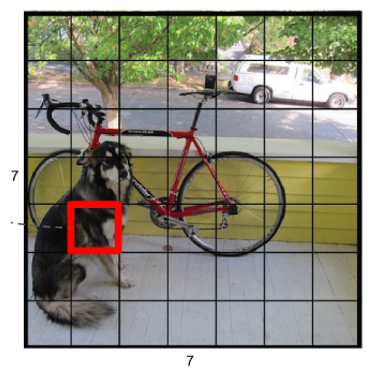
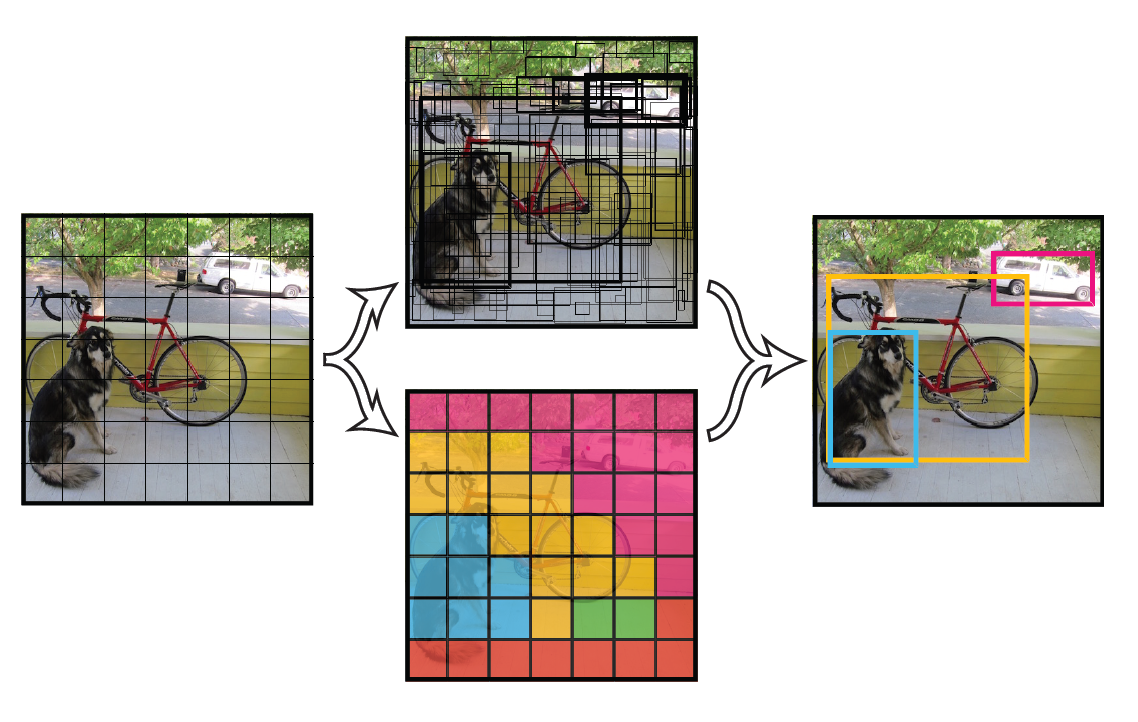
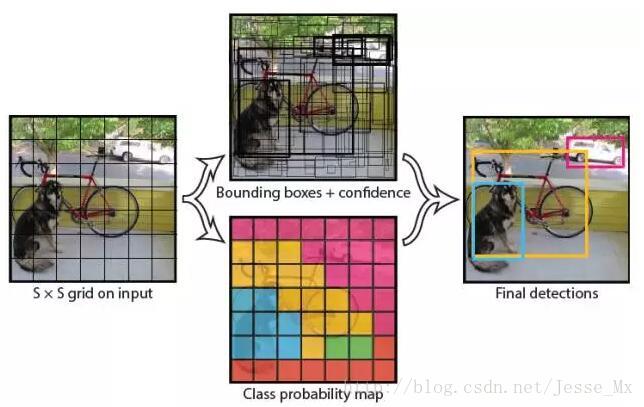
- Resize成448*448,图片分割得到7*7网格(cell)
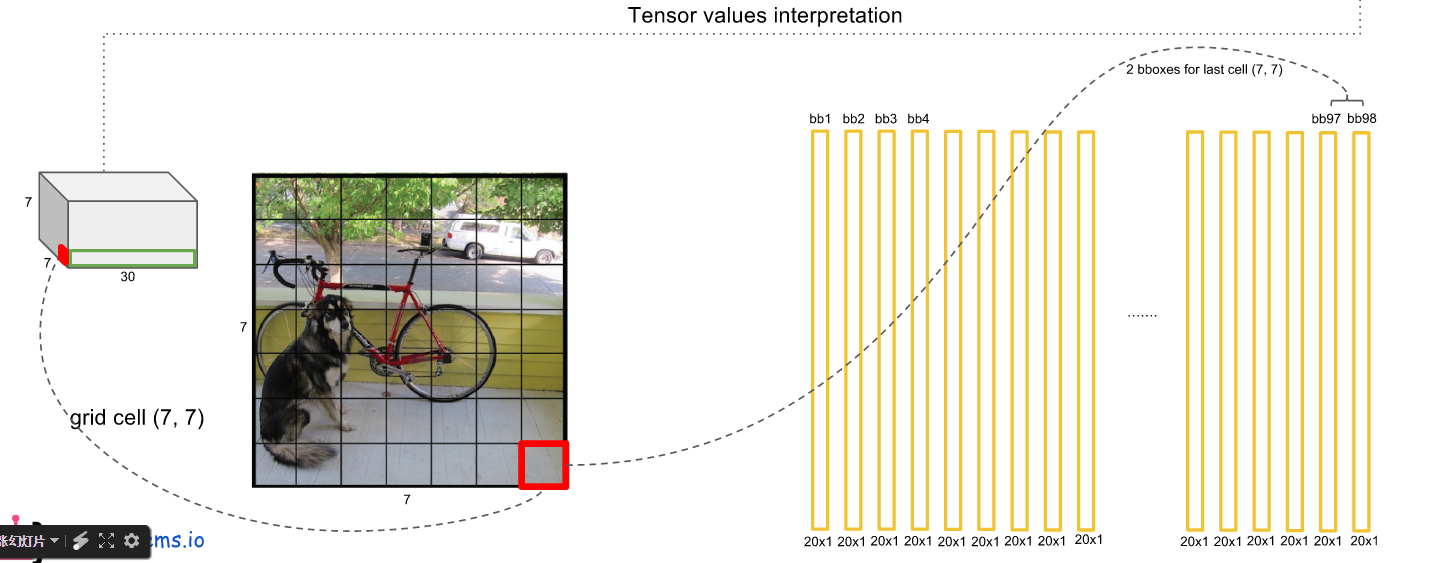
- CNN提取特征和预测:卷积不忿负责提特征。全链接部分负责预测:a) 7*7*2=98个bounding box(bbox) 的坐标
和是否有物体的confidence 。 b) 7*7=49个cell所属20个物体的概率。
- 过滤bbox(通过nms)
网络设计:
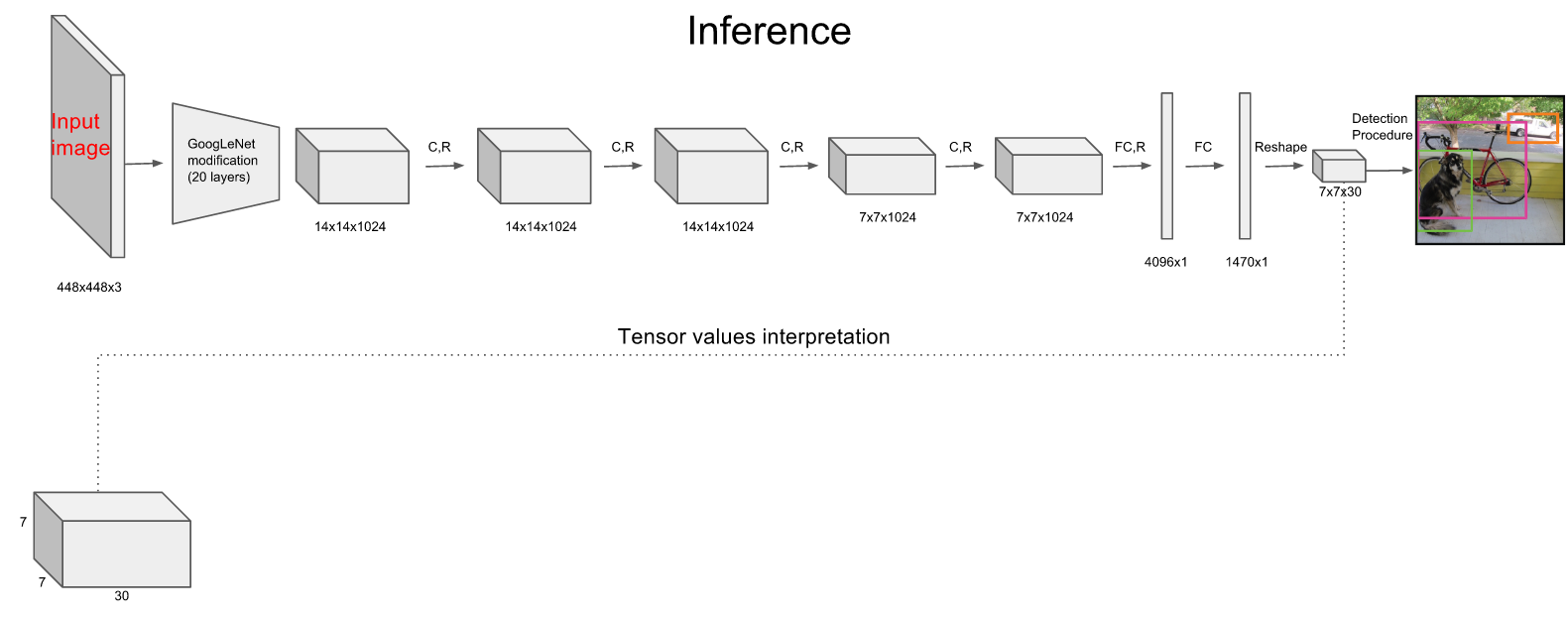
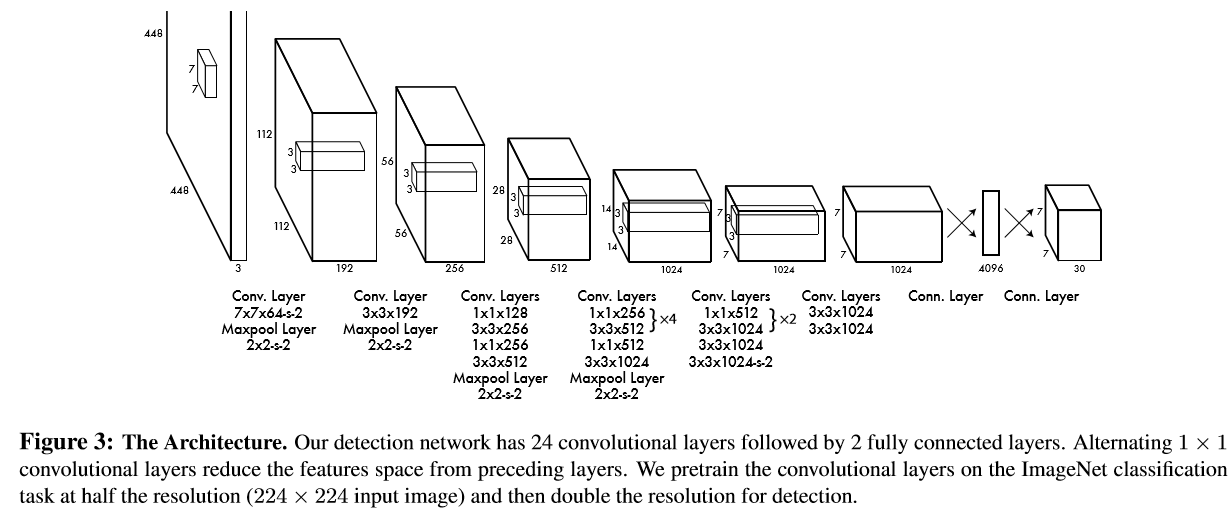
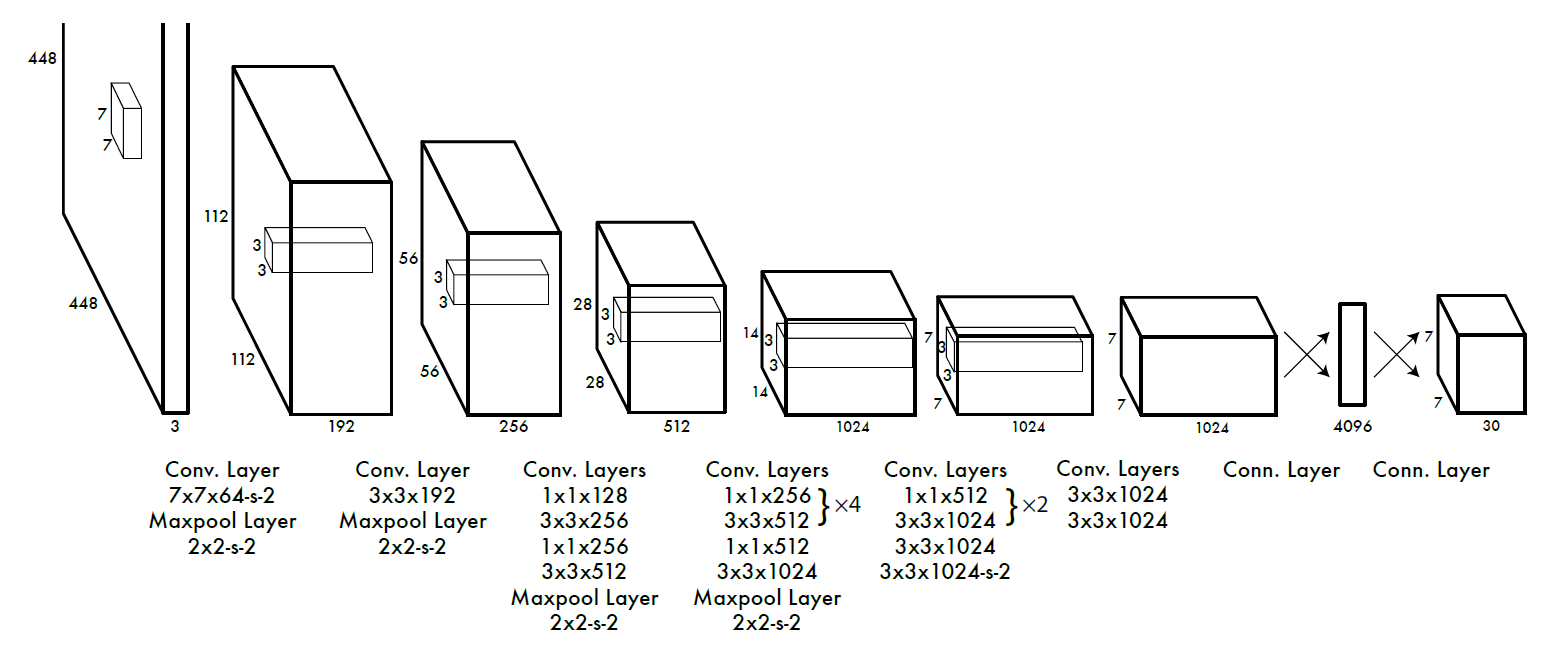
网络结构借鉴了 GoogLeNet 。24个卷积层,2个全链接层。(用1×1 reduction layers 紧跟 3×3 convolutional layers 取代Goolenet的 inception modules )
训练:
预训练分类网络: 在 ImageNet 1000-class competition dataset上预训练一个分类网络,这个网络是Figure3中的前20个卷机网络+average-pooling layer+ fully connected layer (此时网络输入是224*224)。
训练检测网络:转换模型去执行检测任务,《Object detection networks on convolutional feature maps》提到说在预训练网络中增加卷积和全链接层可以改善性能。在他们例子基础上添加4个卷积层和2个全链接层,随机初始化权重。检测要求细粒度的视觉信息,所以把网络输入也又224*224变成448*448。见Figure3。
- 一幅图片分成7x7个网格(grid cell),某个物体的中心落在这个网格中此网格就负责预测这个物体。
-
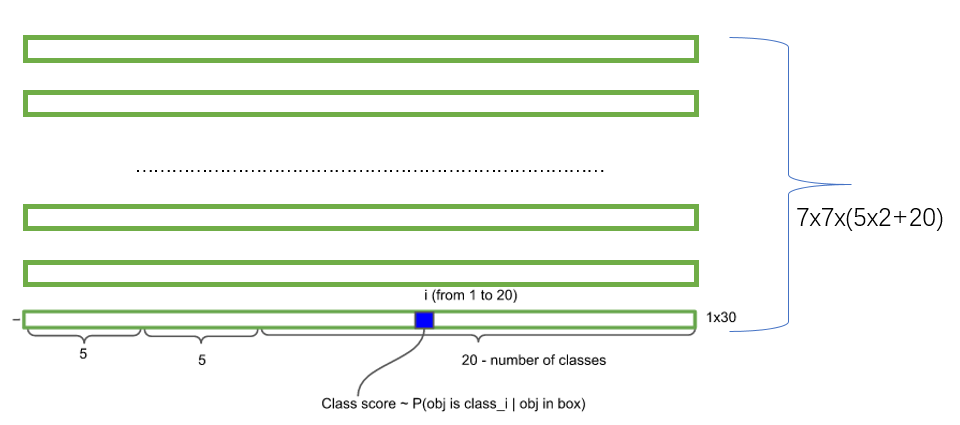
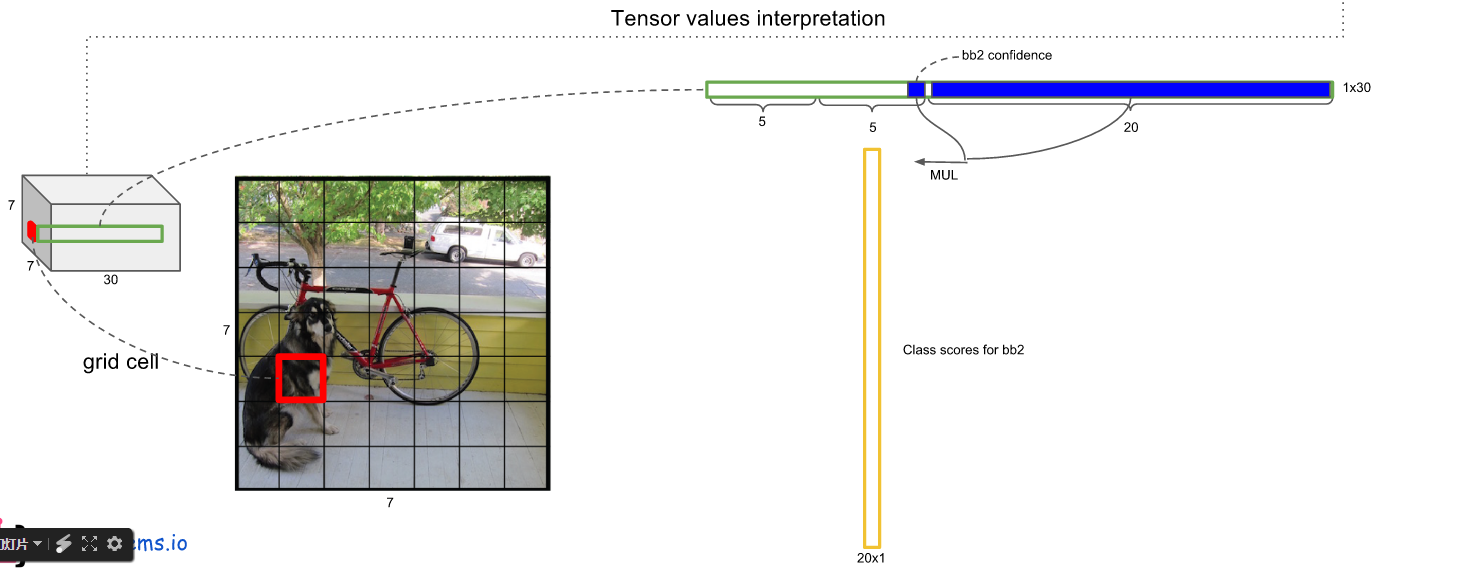
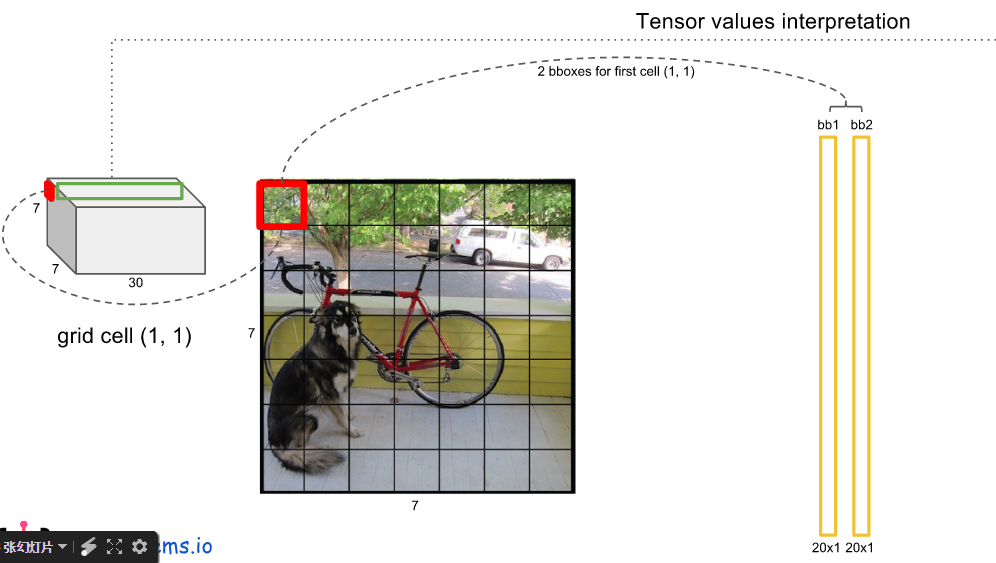
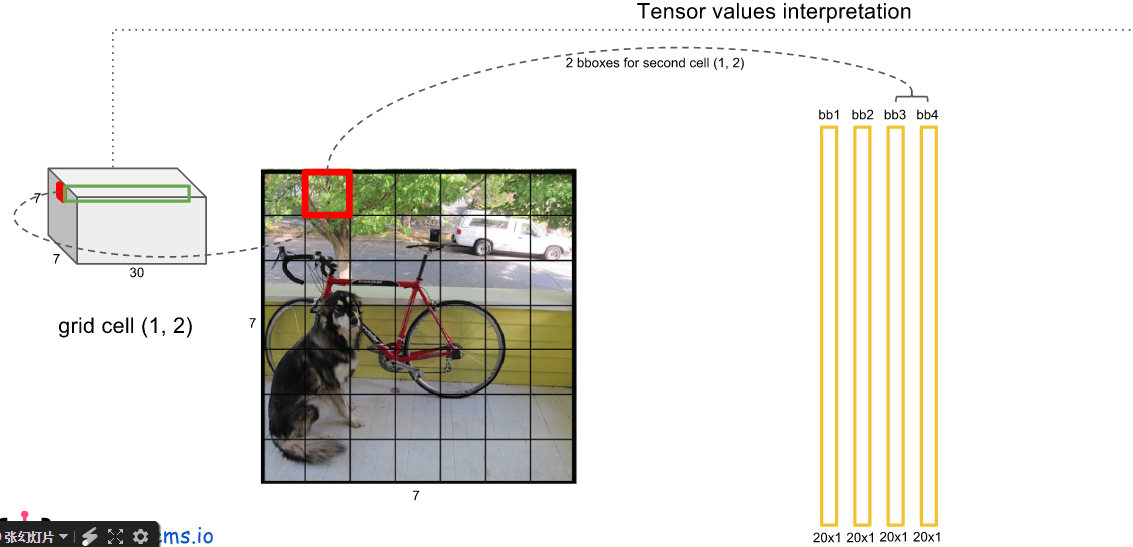
最后一层输出为 (7*7)*30的维度。每个 1*1*30的维度对应原图7*7个cell中的一个,1*1*30中含有类别预测和bbox坐标预测。总得来讲就是让网格负责类别信息,bounding box主要负责坐标信息(部分负责类别信息:confidence也算类别信息)。具体如下:
- 每个网格(1*1*30维度对应原图中的cell)要预测2个bounding box (图中黄色实线框)的坐标(
,w,h) ,其中:中心坐标的
。其中如果有ground true box(人工标记的物体)落在一个grid cell里,第一项取1,否则取0。 第二项是预测的bounding box和实际的ground truth box之间的IOU值。即:每个bounding box要预测
,共5个值 ,2个bounding box共10个值,对应 1*1*30维度特征中的前10个。
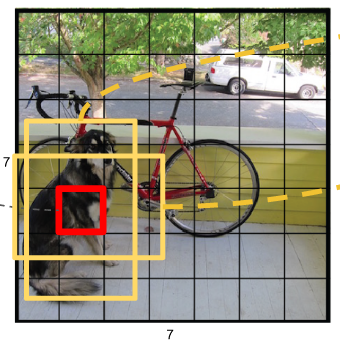
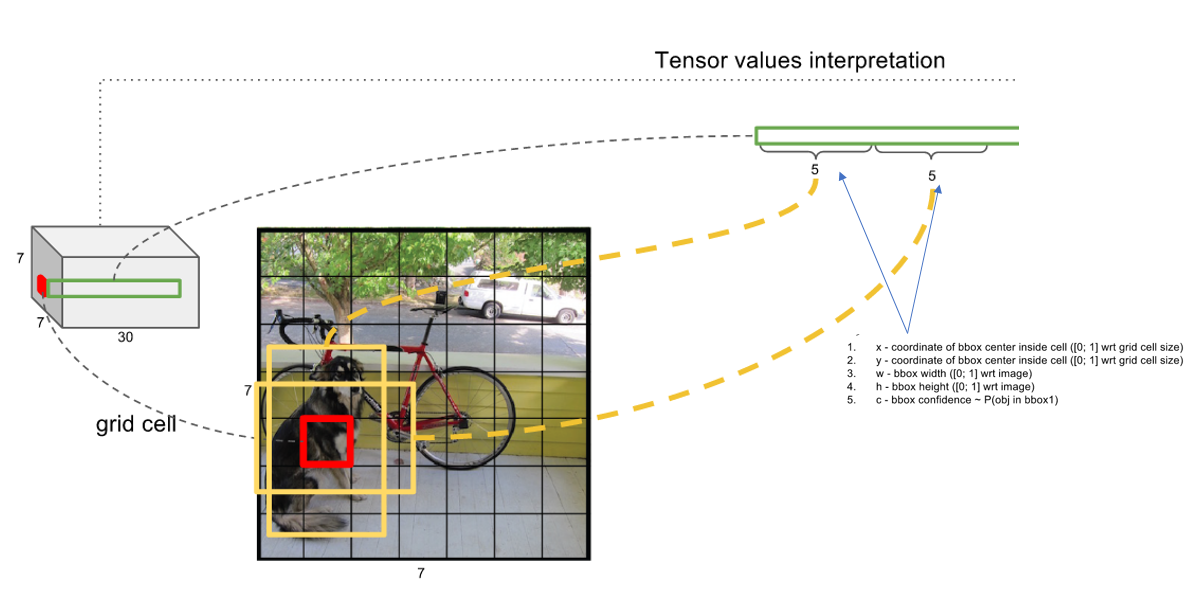
- 每个网格还要预测类别信息,论文中有20类。7x7的网格,每个网格要预测2个 bounding box 和 20个类别概率,输出就是 7x7x(5x2 + 20) 。 (通用公式: SxS个网格,每个网格要预测B个bounding box还要预测C个categories,输出就是S x S x (5*B+C)的一个tensor。 注意:class信息是针对每个网格的,confidence信息是针对每个bounding box的)
损失函数设计:
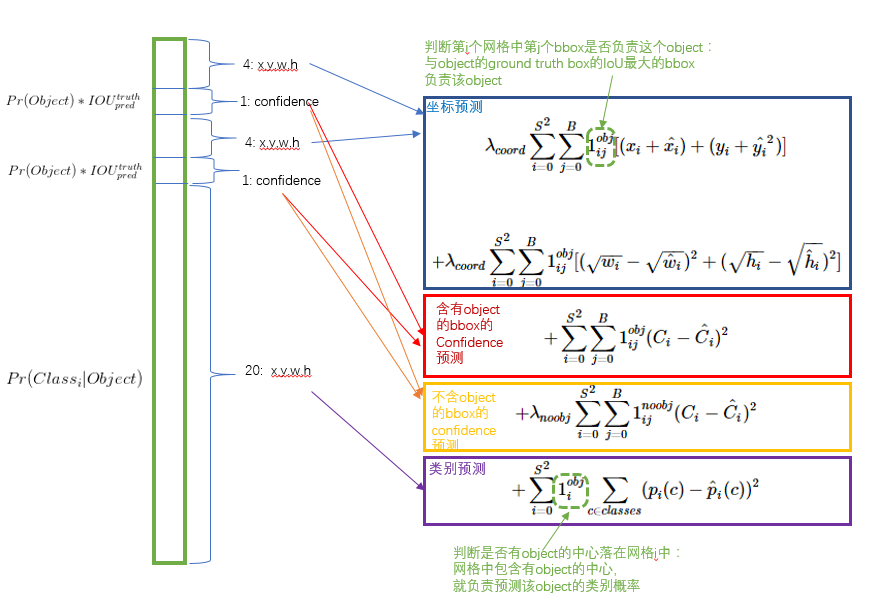
损失函数的设计目标就是让坐标(x,y,w,h),confidence,classification 这个三个方面达到很好的平衡。简单的全部采用了sum-squared error loss来做这件事会有以下不足: a) 8维的localization error和20维的classification error同等重要显然是不合理的; b) 如果一个网格中没有object(一幅图中这种网格很多),那么就会将这些网格中的box的confidence push到0,相比于较少的有object的网格,这种做法是overpowering的,这会导致网络不稳定甚至发散。 解决方案如下:
- 更重视8维的坐标预测,给这些损失前面赋予更大的loss weight, 记为
,在pascal VOC训练中取5。(上图蓝色框)
- 对没有object的bbox的confidence loss,赋予小的loss weight,记为
,在pascal VOC训练中取0.5。(上图橙色框)
- 有object的bbox的confidence loss (上图红色框) 和类别的loss (上图紫色框)的loss weight正常取1。
-
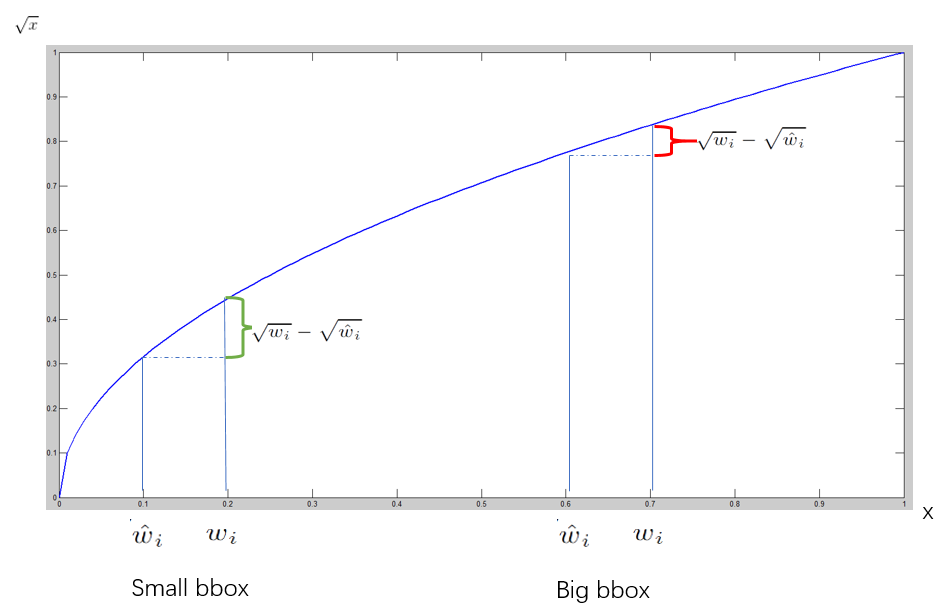
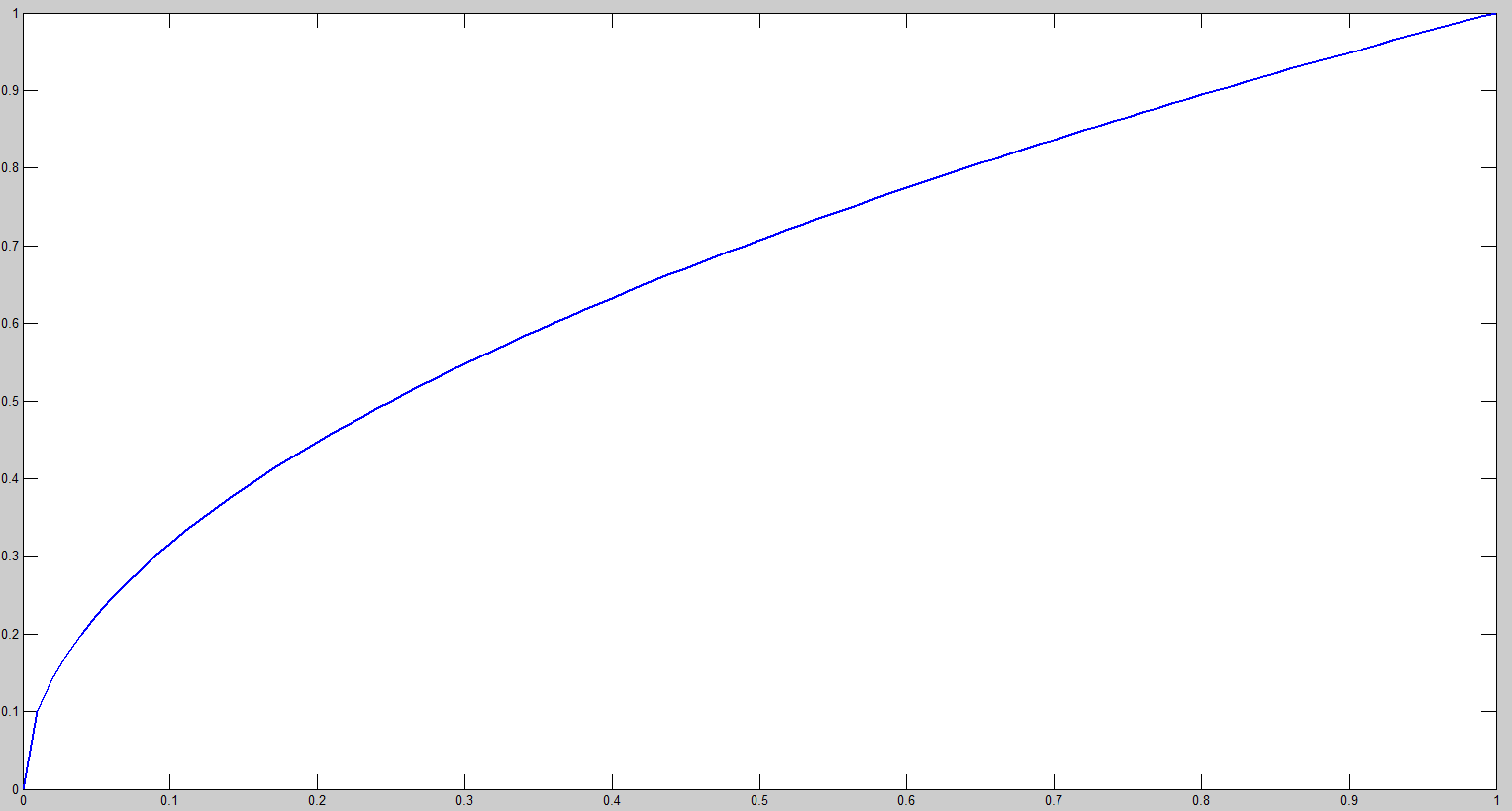
对不同大小的bbox预测中,相比于大bbox预测偏一点,小box预测偏一点更不能忍受。而sum-square error loss中对同样的偏移loss是一样。 为了缓和这个问题,作者用了一个比较取巧的办法,就是将box的width和height取平方根代替原本的height和width。 如下图:small bbox的横轴值较小,发生偏移时,反应到y轴上的loss(下图绿色)比big box(下图红色)要大。
-
一个网格预测多个bounding box,在训练时我们希望每个object(ground true box)只有一个bounding box专门负责(一个object 一个bbox)。具体做法是与ground true box(object)的IOU最大的bounding box 负责该ground true box(object)的预测。这种做法称作bounding box predictor的specialization(专职化)。每个预测器会对特定(sizes,aspect ratio or classed of object)的ground true box预测的越来越好。(个人理解:IOU最大者偏移会更少一些,可以更快速的学习到正确位置)
测试:
Test的时候,每个网格预测的class信息( )和bounding box预测的confidence信息(
) 相乘,就得到每个bounding box的class-specific confidence score。

- 等式左边第一项就是每个网格预测的类别信息,第二三项就是每个bounding box预测的confidence。这个乘积即encode了预测的box属于某一类的概率,也有该box准确度的信息。
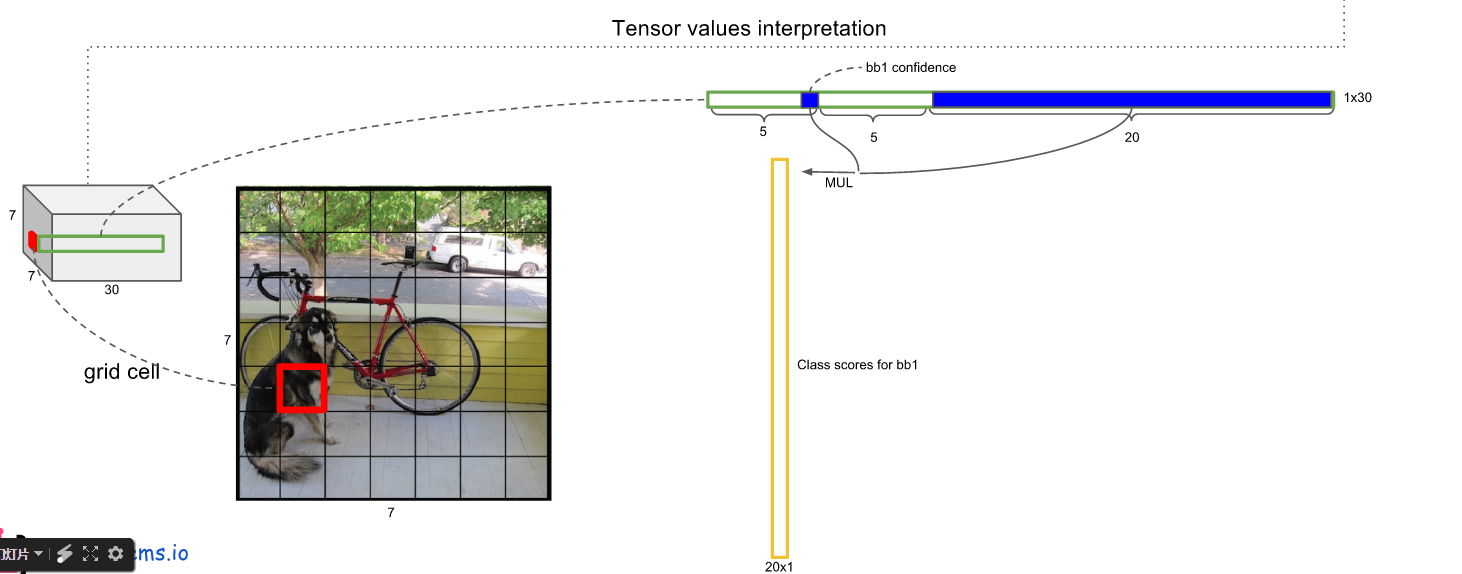
- 对每一个网格的每一个bbox执行同样操作: 7x7x2 = 98 bbox (每个bbox既有对应的class信息又有坐标信息)
- 得到每个bbox的class-specific confidence score以后,设置阈值,滤掉得分低的boxes,对保留的boxes进行NMS处理,就得到最终的检测结果。
缺陷:
-
YOLO对相互靠的很近的物体(挨在一起且中点都落在同一个格子上的情况),还有很小的群体 检测效果不好,这是因为一个网格中只预测了两个框,并且只属于一类。
-
测试图像中,当同一类物体出现的不常见的长宽比和其他情况时泛化能力偏弱。
-
由于损失函数的问题,定位误差是影响检测效果的主要原因,尤其是大小物体的处理上,还有待加强。
本文图片很多来自PPT: deepsystems.io
内容主要参考如下博客:
画图不易,如果觉得文章不错欢迎点赞支持一下。
<机器爱学习>YOLO v1深入理解
YOLO(You Only Look Once)是一种基于深度神经网络的对象识别和定位算法,其最大的特点是运行速度很快,可以用于实时系统。
现在YOLO已经发展到v3版本,不过新版本也是在原有版本基础上不断改进演化的,所以本文先分析YOLO v1版本。
关于 YOLOv2/YOLO9000 和 YOLOv3 的分析理解请移步 YOLO v2 / YOLO 9000和 YOLO v3深入理解。
对象识别和定位
输入一张图片,要求输出其中所包含的对象,以及每个对象的位置(包含该对象的矩形框)。
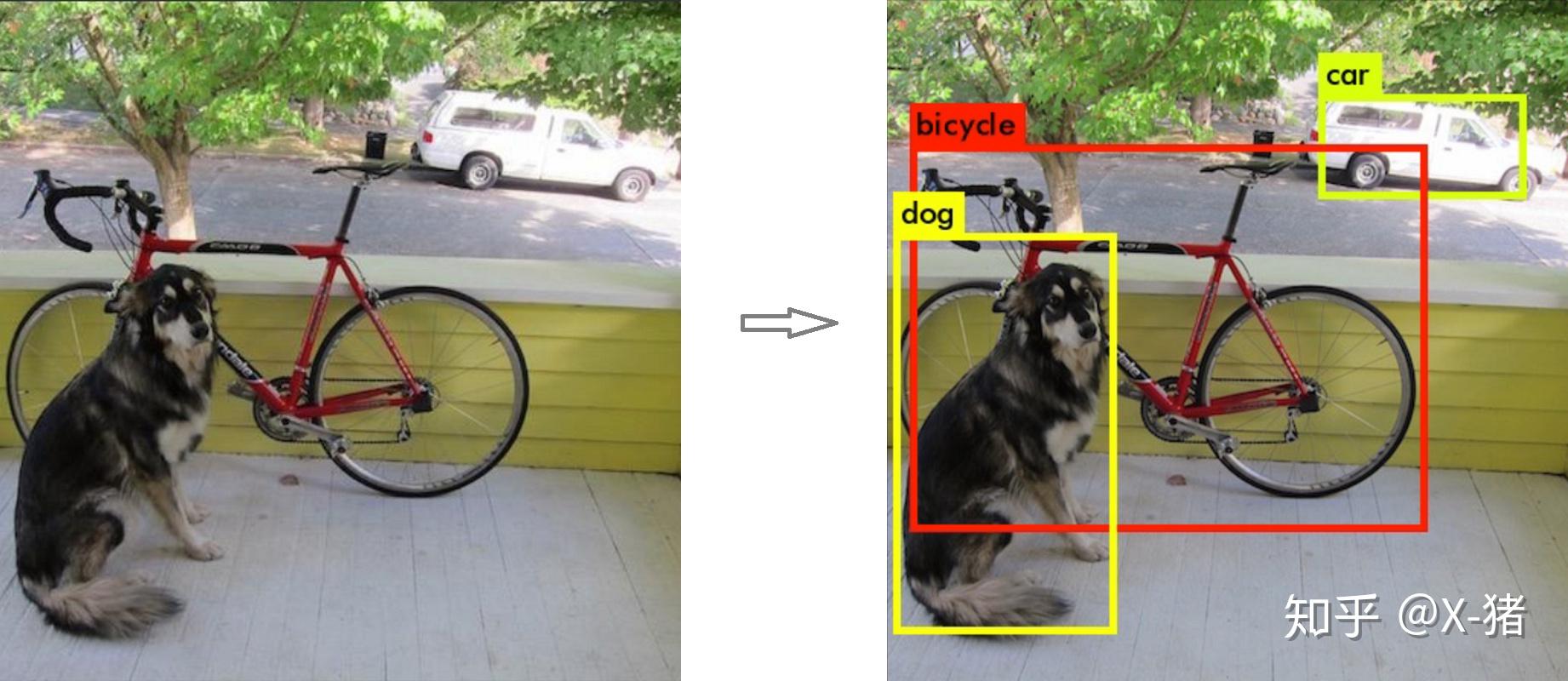 图1 对象识别和定位
图1 对象识别和定位
对象识别和定位,可以看成两个任务:找到图片中某个存在对象的区域,然后识别出该区域中具体是哪个对象。
对象识别这件事(一张图片仅包含一个对象,且基本占据图片的整个范围),最近几年基于CNN卷积神经网络的各种方法已经能达到不错的效果了。所以主要需要解决的问题是,对象在哪里。
最简单的想法,就是遍历图片中所有可能的位置,地毯式搜索不同大小,不同宽高比,不同位置的每个区域,逐一检测其中是否存在某个对象,挑选其中概率最大的结果作为输出。显然这种方法效率太低。
RCNN/Fast RCNN/Faster RCNN
RCNN开创性的提出了候选区(Region Proposals)的方法,先从图片中搜索出一些可能存在对象的候选区(Selective Search),大概2000个左右,然后对每个候选区进行对象识别。大幅提升了对象识别和定位的效率。
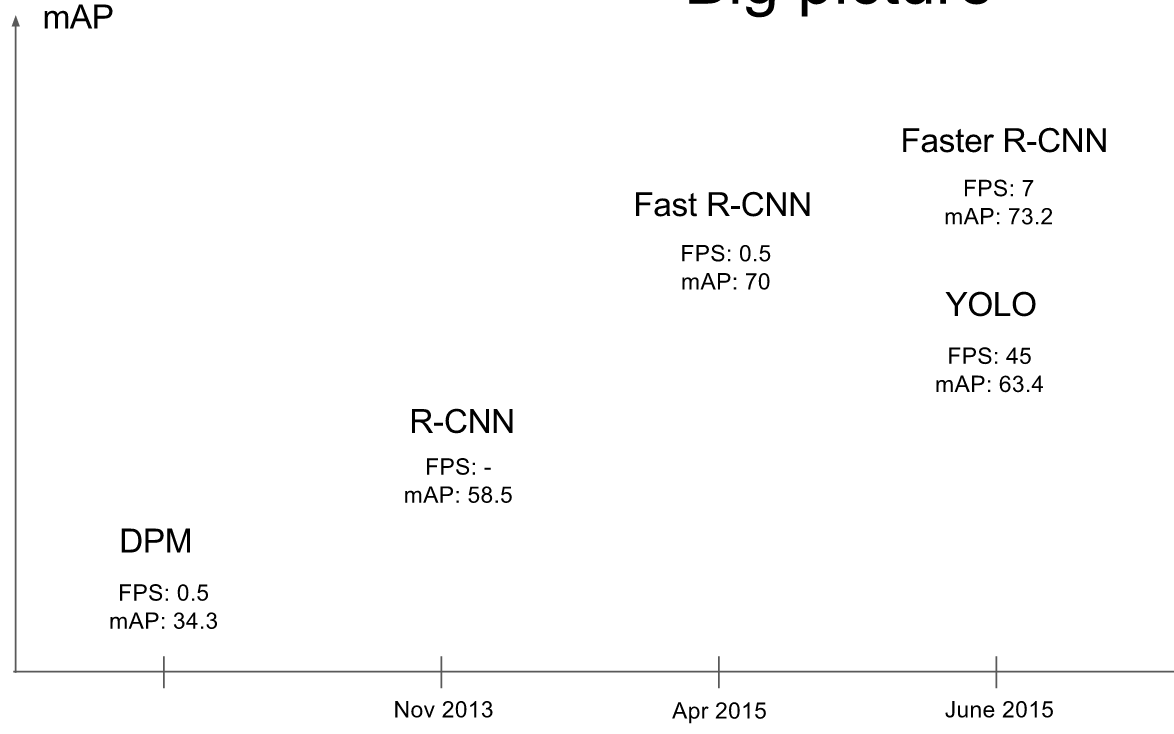
不过RCNN的速度依然很慢,其处理一张图片大概需要49秒。因此又有了后续的Fast RCNN 和 Faster RCNN,针对 RCNN的神经网络结构和候选区的算法不断改进,Faster RCNN已经可以达到一张图片约0.2秒的处理速度。下图来自 R-CNN, Fast R-CNN, Faster R-CNN, YOLO — Object Detection Algorithms
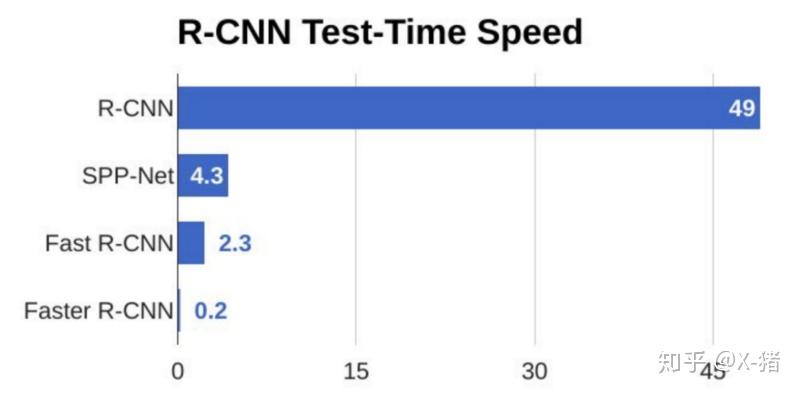 图2 RCNN系列处理速度
图2 RCNN系列处理速度
但总体来说,RCNN系列依然是两阶段处理模式:先提出候选区,再识别候选区中的对象。
YOLO
YOLO意思是You Only Look Once,创造性的将候选区和对象识别这两个阶段合二为一,看一眼图片(不用看两眼哦)就能知道有哪些对象以及它们的位置。
实际上,YOLO并没有真正去掉候选区,而是采用了预定义的候选区(准确点说应该是预测区,因为并不是Faster RCNN所采用的Anchor)。也就是将图片划分为 7*7=49 个网格(grid),每个网格允许预测出2个边框(bounding box,包含某个对象的矩形框),总共 49*2=98 个bounding box。可以理解为98个候选区,它们很粗略的覆盖了图片的整个区域。
RCNN:我们先来研究一下图片,嗯,这些位置很可能存在一些对象,你们对这些位置再检测一下看到底是哪些对象在里面。
YOLO:我们把图片大致分成98个区域,每个区域看下有没有对象存在,以及具体位置在哪里。
RCNN:你这么简单粗暴真的没问题吗?
YOLO:当然没有......咳,其实是有一点点问题的,准确率要低一点,但是我非常快!快!快!
RCNN:为什么你用那么粗略的候选区,最后也能得到还不错的bounding box呢?
YOLO:你不是用过边框回归吗?我拿来用用怎么不行了。RCNN虽然会找到一些候选区,但毕竟只是候选,等真正识别出其中的对象以后,还要对候选区进行微调,使之更接近真实的bounding box。这个过程就是边框回归:将候选区bounding box调整到更接近真实的bounding box。
既然反正最后都是要调整的,干嘛还要先费劲去寻找候选区呢,大致有个区域范围就行了,所以YOLO就这么干了。
不过话说回来,边框回归为啥能起作用,我觉得本质上是因为 分类信息 中已经包含了 位置信息。就像你看到主子的脸和身体,就能推测出耳朵和屁股的位置。
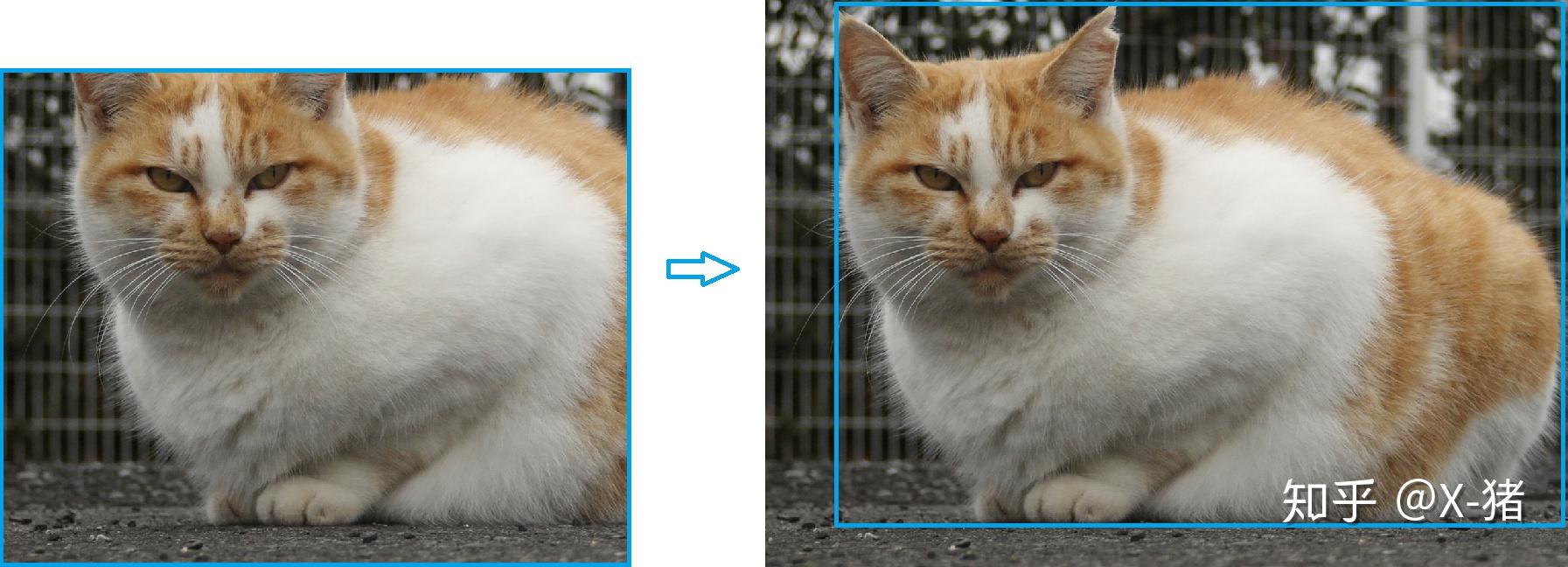 图3 边框调整
图3 边框调整
下面具体看下YOLO的实现方案。
1)结构
去掉候选区这个步骤以后,YOLO的结构非常简单,就是单纯的卷积、池化最后加了两层全连接。单看网络结构的话,和普通的CNN对象分类网络几乎没有本质的区别,最大的差异是最后输出层用线性函数做激活函数,因为需要预测bounding box的位置(数值型),而不仅仅是对象的概率。所以粗略来说,YOLO的整个结构就是输入图片经过神经网络的变换得到一个输出的张量,如下图所示。
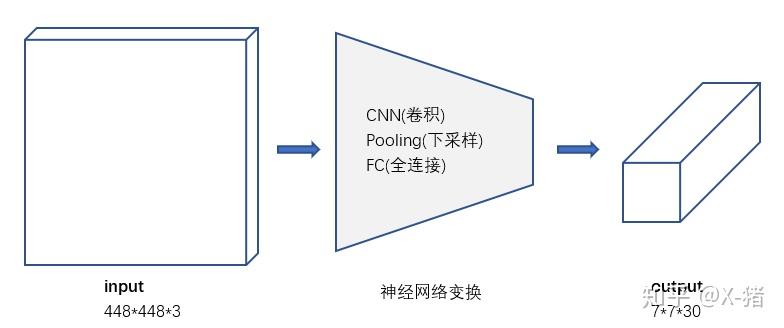 图4 输入 - 输出
图4 输入 - 输出
因为只是一些常规的神经网络结构,所以,理解YOLO的设计的时候,重要的是理解输入和输出的映射关系.
2)输入和输出的映射关系
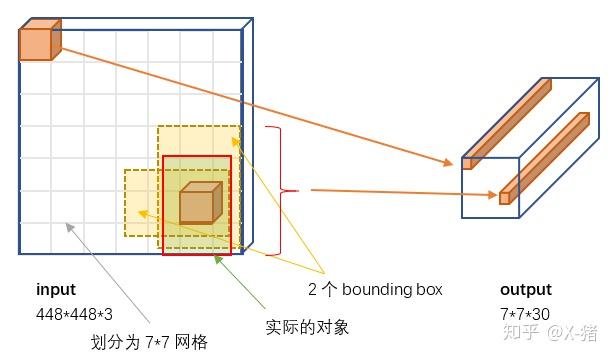 图5 输入 - 输出
图5 输入 - 输出
3)输入
参考图5,输入就是原始图像,唯一的要求是缩放到448*448的大小。主要是因为YOLO的网络中,卷积层最后接了两个全连接层,全连接层是要求固定大小的向量作为输入,所以倒推回去也就要求原始图像有固定的尺寸。那么YOLO设计的尺寸就是448*448。
4)输出
输出是一个 7*7*30 的张量(tensor)。
4.1)7*7网格
根据YOLO的设计,输入图像被划分为 7*7 的网格(grid),输出张量中的 7*7 就对应着输入图像的 7*7 网格。或者我们把 7*7*30 的张量看作 7*7=49个30维的向量,也就是输入图像中的每个网格对应输出一个30维的向量。参考上面图5,比如输入图像左上角的网格对应到输出张量中左上角的向量。
要注意的是,并不是说仅仅网格内的信息被映射到一个30维向量。经过神经网络对输入图像信息的提取和变换,网格周边的信息也会被识别和整理,最后编码到那个30维向量中。
4.2)30维向量
具体来看每个网格对应的30维向量中包含了哪些信息。
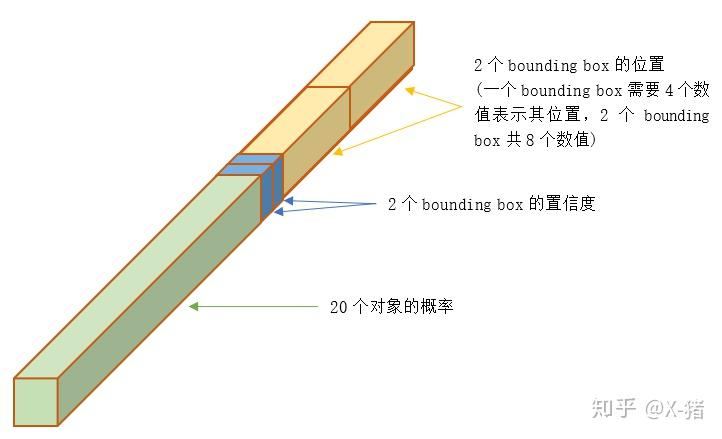 图6 30维输出向量
图6 30维输出向量
① 20个对象分类的概率
因为YOLO支持识别20种不同的对象(人、鸟、猫、汽车、椅子等),所以这里有20个值表示该网格位置存在任一种对象的概率。可以记为 ,之所以写成条件概率,意思是如果该网格存在一个对象Object,那么它是
的概率是
。(记不清条件概率的同学可以参考一下 理解贝叶斯定理)
② 2个bounding box的位置
每个bounding box需要4个数值来表示其位置,(Center_x,Center_y,width,height),即(bounding box的中心点的x坐标,y坐标,bounding box的宽度,高度),2个bounding box共需要8个数值来表示其位置。
③ 2个bounding box的置信度
bounding box的置信度 = 该bounding box内存在对象的概率 * 该bounding box与该对象实际bounding box的IOU
用公式来表示就是
是bounding box内存在对象的概率,区别于上面第①点的
。Pr(Object)并不管是哪个对象,它体现的是 有或没有 对象的概率。第①点中的
意思是假设已经有一个对象在网格中了,这个对象具体是哪一个。
是 bounding box 与 对象真实bounding box 的IOU(Intersection over Union,交并比)。要注意的是,现在讨论的30维向量中的bounding box是YOLO网络的输出,也就是预测的bounding box。所以
体现了预测的bounding box与真实bounding box的接近程度。
还要说明的是,虽然有时说"预测"的bounding box,但这个IOU是在训练阶段计算的。等到了测试阶段(Inference),这时并不知道真实对象在哪里,只能完全依赖于网络的输出,这时已经不需要(也无法)计算IOU了。
综合来说,一个bounding box的置信度Confidence意味着它 是否包含对象且位置准确的程度。置信度高表示这里存在一个对象且位置比较准确,置信度低表示可能没有对象 或者 即便有对象也存在较大的位置偏差。
简单解释一下IOU。下图来自Andrew Ng的深度学习课程,IOU=交集部分面积/并集部分面积,2个box完全重合时IOU=1,不相交时IOU=0。
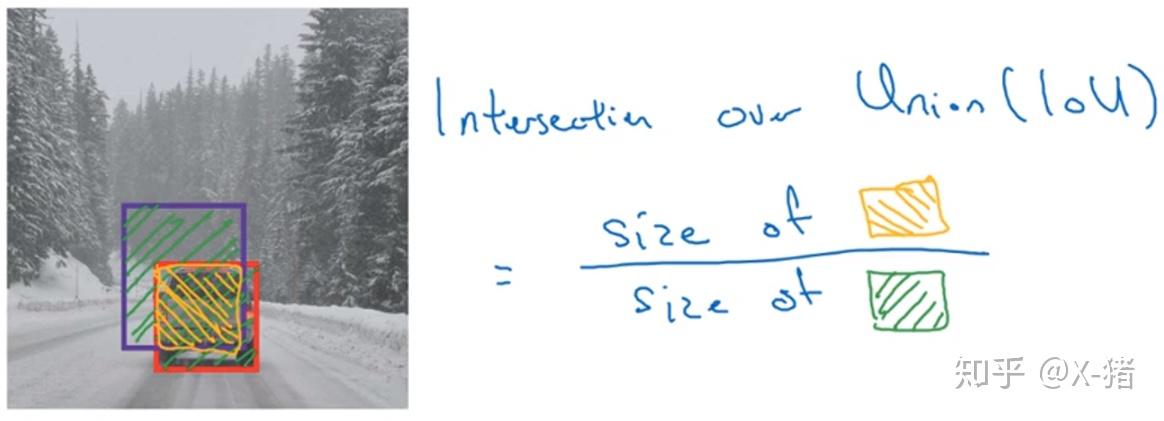 图7 IOU
图7 IOU
总的来说,30维向量 = 20个对象的概率 + 2个bounding box * 4个坐标 + 2个bounding box的置信度
4.3)讨论
① 一张图片最多可以检测出49个对象
每个30维向量中只有一组(20个)对象分类的概率,也就只能预测出一个对象。所以输出的 7*7=49个 30维向量,最多表示出49个对象。
② 总共有 49*2=98 个候选区(bounding box)
每个30维向量中有2组bounding box,所以总共是98个候选区。
③ YOLO的bounding box并不是Faster RCNN的Anchor
Faster RCNN等一些算法采用每个grid中手工设置n个Anchor(先验框,预先设置好位置的bounding box)的设计,每个Anchor有不同的大小和宽高比。YOLO的bounding box看起来很像一个grid中2个Anchor,但它们不是。YOLO并没有预先设置2个bounding box的大小和形状,也没有对每个bounding box分别输出一个对象的预测。它的意思仅仅是对一个对象预测出2个bounding box,选择预测得相对比较准的那个。
这里采用2个bounding box,有点不完全算监督算法,而是像进化算法。如果是监督算法,我们需要事先根据样本就能给出一个正确的bounding box作为回归的目标。但YOLO的2个bounding box事先并不知道会在什么位置,只有经过前向计算,网络会输出2个bounding box,这两个bounding box与样本中对象实际的bounding box计算IOU。这时才能确定,IOU值大的那个bounding box,作为负责预测该对象的bounding box。
训练开始阶段,网络预测的bounding box可能都是乱来的,但总是选择IOU相对好一些的那个,随着训练的进行,每个bounding box会逐渐擅长对某些情况的预测(可能是对象大小、宽高比、不同类型的对象等)。所以,这是一种进化或者非监督学习的思想。
另外论文中经常提到responsible。比如:Our system divides the input image into an S*S grid. If the center of an object falls into a grid cell, that grid cell is responsible for detecting that object. 这个 responsible 有点让人疑惑,对预测"负责"是啥意思。其实没啥特别意思,就是一个Object只由一个grid来进行预测,不要多个grid都抢着预测同一个Object。更具体一点说,就是在设置训练样本的时候,样本中的每个Object归属到且仅归属到一个grid,即便有时Object跨越了几个grid,也仅指定其中一个。具体就是计算出该Object的bounding box的中心位置,这个中心位置落在哪个grid,该grid对应的输出向量中该对象的类别概率是1(该gird负责预测该对象),所有其它grid对该Object的预测概率设为0(不负责预测该对象)。
还有:YOLO predicts multiple bounding boxes per grid cell. At training time we only want one bounding box predictor to be responsible for each object. 同样,虽然一个grid中会产生2个bounding box,但我们会选择其中一个作为预测结果,另一个会被忽略。下面构造训练样本的部分会看的更清楚。
④ 可以调整网格数量、bounding box数量
7*7网格,每个网格2个bounding box,对448*448输入图像来说覆盖粒度有点粗。我们也可以设置更多的网格以及更多的bounding box。设网格数量为 S*S,每个网格产生B个边框,网络支持识别C个不同的对象。这时,输出的向量长度为: 整个输出的tensor就是:
YOLO选择的参数是 7*7网格,2个bounding box,20种对象,因此 输出向量长度 = 20 + 2 * (4+1) = 30。整个输出的tensor就是 7*7*30。
因为网格和bounding box设置的比较稀疏,所以这个版本的YOLO训练出来后预测的准确率和召回率都不是很理想,后续的v2、v3版本还会改进。当然,因为其速度能够满足实时处理的要求,所以对工业界还是挺有吸引力的。
5)训练样本构造
作为监督学习,我们需要先构造好训练样本,才能让模型从中学习。
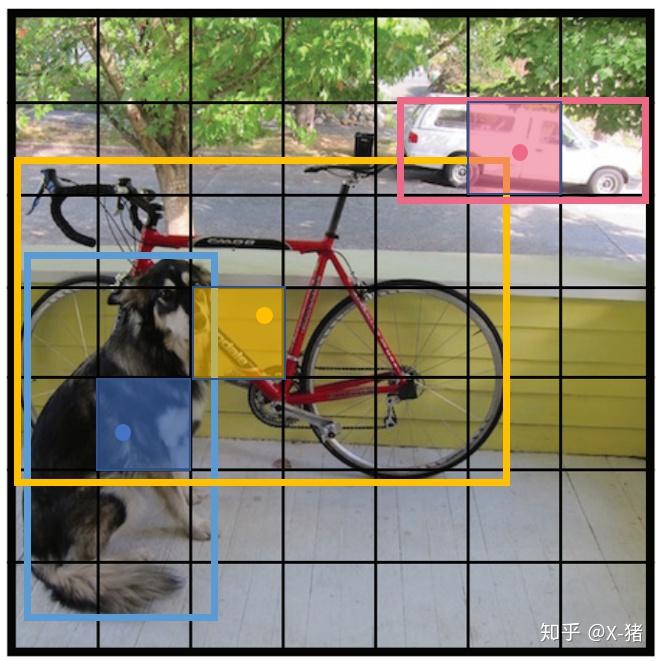 图8 输入样本图片
图8 输入样本图片
对于一张输入图片,其对应输出的7*7*30张量(也就是通常监督学习所说的标签y或者label)应该填写什么数据呢。
首先,输出的 7*7维度 对应于输入的 7*7 网格。 然后具体看下30维向量的填写(请对照上面图6)。
① 20个对象分类的概率
对于输入图像中的每个对象,先找到其中心点。比如图8中的自行车,其中心点在黄色圆点位置,中心点落在黄色网格内,所以这个黄色网格对应的30维向量中,自行车的概率是1,其它对象的概率是0。所有其它48个网格的30维向量中,该自行车的概率都是0。这就是所谓的"中心点所在的网格对预测该对象负责"。狗和汽车的分类概率也是同样的方法填写。
② 2个bounding box的位置
训练样本的bounding box位置应该填写对象实际的bounding box,但一个对象对应了2个bounding box,该填哪一个呢?上面讨论过,需要根据网络输出的bounding box与对象实际bounding box的IOU来选择,所以要在训练过程中动态决定到底填哪一个bounding box。参考下面第③点。
③ 2个bounding box的置信度
上面讨论过置信度公式 可以直接计算出来,就是用网络输出的2个bounding box与对象真实bounding box一起计算出IOU。
然后看2个bounding box的IOU,哪个比较大(更接近对象实际的bounding box),就由哪个bounding box来负责预测该对象是否存在,即该bounding box的 ,同时对象真实bounding box的位置也就填入该bounding box。另一个不负责预测的bounding box的
。
总的来说就是,与对象实际bounding box最接近的那个bounding box,其 ,该网格的其它bounding box的
。
举个例子,比如上图中自行车的中心点位于4行3列网格中,所以输出tensor中4行3列位置的30维向量如下图所示。
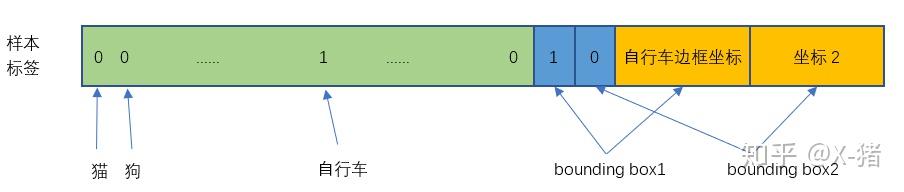 图9 训练样本的一个30维向量
图9 训练样本的一个30维向量
翻译成人话就是:4行3列网格位置有一辆自行车,它的中心点在这个网格内,它的位置边框是bounding box1所填写的自行车实际边框。
注意,图中将自行车的位置放在bounding box1,但实际上是在训练过程中等网络输出以后,比较两个bounding box与自行车实际位置的IOU,自行车的位置(实际bounding box)放置在IOU比较大的那个bounding box(图中假设是bounding box1),且该bounding box的置信度设为1。
6)损失函数
损失就是网络实际输出值与样本标签值之间的偏差。
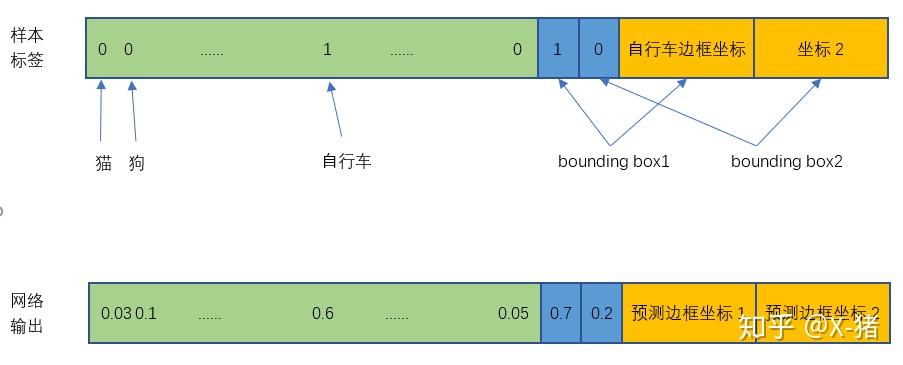 图10 样本标签与网络实际输出
图10 样本标签与网络实际输出
YOLO给出的损失函数如下
 图11 损失函数
图11 损失函数
公式中
意思是网格i中存在对象。
意思是网格i的第j个bounding box中存在对象。
意思是网格i的第j个bounding box中不存在对象。
总的来说,就是用网络输出与样本标签的各项内容的误差平方和作为一个样本的整体误差。 损失函数中的几个项是与输出的30维向量中的内容相对应的。
① 对象分类的误差
公式第5行,注意 意味着存在对象的网格才计入误差。
② bounding box的位置误差
公式第1行和第2行。
a)都带有 意味着只有"负责"(IOU比较大)预测的那个bounding box的数据才会计入误差。
b)第2行宽度和高度先取了平方根,因为如果直接取差值的话,大的对象对差值的敏感度较低,小的对象对差值的敏感度较高,所以取平方根可以降低这种敏感度的差异,使得较大的对象和较小的对象在尺寸误差上有相似的权重。
c)乘以 调节bounding box位置误差的权重(相对分类误差和置信度误差)。YOLO设置
,即调高位置误差的权重。
③ bounding box的置信度误差
公式第3行和第4行。
a)第3行是存在对象的bounding box的置信度误差。带有 意味着只有"负责"(IOU比较大)预测的那个bounding box的置信度才会计入误差。
b)第4行是不存在对象的bounding box的置信度误差。因为不存在对象的bounding box应该老老实实的说"我这里没有对象",也就是输出尽量低的置信度。如果它不恰当的输出较高的置信度,会与真正"负责"该对象预测的那个bounding box产生混淆。其实就像对象分类一样,正确的对象概率最好是1,所有其它对象的概率最好是0。
c)第4行会乘以 调节不存在对象的bounding box的置信度的权重(相对其它误差)。YOLO设置
,即调低不存在对象的bounding box的置信度误差的权重。
7)训练
YOLO先使用ImageNet数据集对前20层卷积网络进行预训练,然后使用完整的网络,在PASCAL VOC数据集上进行对象识别和定位的训练和预测。YOLO的网络结构如下图所示:
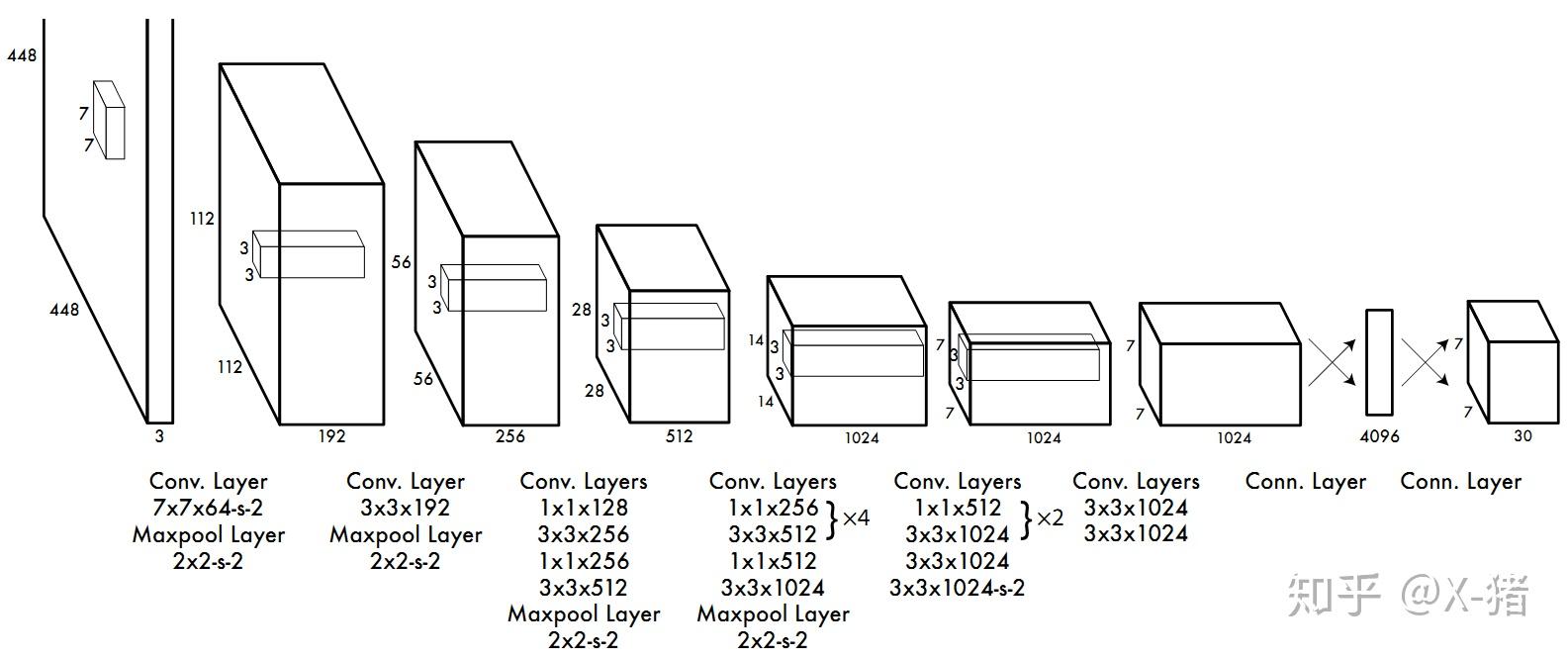
YOLO的最后一层采用线性激活函数,其它层都是Leaky ReLU。训练中采用了drop out和数据增强(data augmentation)来防止过拟合。更多细节请参考原论文。
8)预测(inference)
训练好的YOLO网络,输入一张图片,将输出一个 7*7*30 的张量(tensor)来表示图片中所有网格包含的对象(概率)以及该对象可能的2个位置(bounding box)和可信程度(置信度)。 为了从中提取出最有可能的那些对象和位置,YOLO采用NMS(Non-maximal suppression,非极大值抑制)算法。
9)NMS(非极大值抑制)
NMS方法并不复杂,其核心思想是:选择得分最高的作为输出,与该输出重叠的去掉,不断重复这一过程直到所有备选处理完。
YOLO的NMS计算方法如下。
网络输出的7*7*30的张量,在每一个网格中,对象 位于第j个bounding box的得分:
它代表着某个对象
存在于第j个bounding box的可能性。
每个网格有:20个对象的概率*2个bounding box的置信度,共40个得分(候选对象)。49个网格共1960个得分。Andrew Ng建议每种对象分别进行NMS,那么每种对象有 1960/20=98 个得分。
NMS步骤如下:
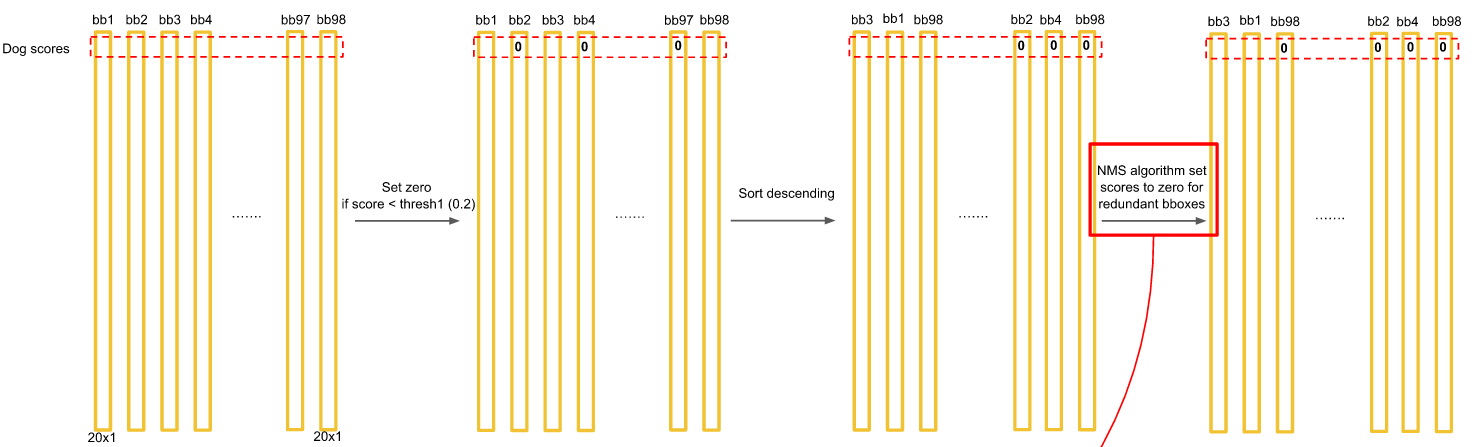
1)设置一个Score的阈值,低于该阈值的候选对象排除掉(将该Score设为0)
2)遍历每一个对象类别
2.1)遍历该对象的98个得分
2.1.1)找到Score最大的那个对象及其bounding box,添加到输出列表
2.1.2)对每个Score不为0的候选对象,计算其与上面2.1.1输出对象的bounding box的IOU
2.1.3)根据预先设置的IOU阈值,所有高于该阈值(重叠度较高)的候选对象排除掉(将Score设为0)
2.1.4)如果所有bounding box要么在输出列表中,要么Score=0,则该对象类别的NMS完成,返回步骤2处理下一种对象
3)输出列表即为预测的对象
10)小结
YOLO以速度见长,处理速度可以达到45fps,其快速版本(网络较小)甚至可以达到155fps。这得益于其识别和定位合二为一的网络设计,而且这种统一的设计也使得训练和预测可以端到端的进行,非常简便。
不足之处是小对象检测效果不太好(尤其是一些聚集在一起的小对象),对边框的预测准确度不是很高,总体预测精度略低于Fast RCNN。主要是因为网格设置比较稀疏,而且每个网格只预测两个边框,另外Pooling层会丢失一些细节信息,对定位存在影响。 更多细节请参考原论文。
最后,如果你竟然坚持看到这里,觉得还有所帮助的话,请点个赞:)๑ ๑
参考
You Only Look Once: Unified, Real-Time Object Detection
RCNN学习笔记(6):You Only Look Once(YOLO):Unified, Real-Time Object Detection
Reference link: http://blog.csdn.net/tangwei2014
这是继RCNN,fast-RCNN 和 faster-RCNN之后,rbg(Ross Girshick)大神挂名的又一大作,起了一个很娱乐化的名字:YOLO。 虽然目前版本还有一些硬伤,但是解决了目前基于DL检测中一个大痛点,就是速度问题。 其增强版本GPU中能跑45fps,简化版本155fps。
论文下载:http://arxiv.org/abs/1506.02640
代码下载:https://github.com/pjreddie/darknet
1. YOLO的核心思想
-
YOLO的核心思想就是利用整张图作为网络的输入,直接在输出层回归bounding box的位置和bounding box所属的类别。
-
没记错的话faster RCNN中也直接用整张图作为输入,但是faster-RCNN整体还是采用了RCNN那种 proposal+classifier的思想,只不过是将提取proposal的步骤放在CNN中实现了。
2.YOLO的实现方法
- 将一幅图像分成SxS个网格(grid cell),如果某个object的中心 落在这个网格中,则这个网格就负责预测这个object。
-
每个网格要预测B个bounding box,每个bounding box除了要回归自身的位置之外,还要附带预测一个confidence值。
这个confidence代表了所预测的box中含有object的置信度和这个box预测的有多准两重信息,其值是这样计算的:其中如果有object落在一个grid cell里,第一项取1,否则取0。 第二项是预测的bounding box和实际的groundtruth之间的IoU值。
-
每个bounding box要预测(x, y, w, h)和confidence共5个值,每个网格还要预测一个类别信息,记为C类。则SxS个网格,每个网格要预测B个bounding box还要预测C个categories。输出就是S x S x (5*B+C)的一个tensor。
注意:class信息是针对每个网格的,confidence信息是针对每个bounding box的。 -
举例说明: 在PASCAL VOC中,图像输入为448x448,取S=7,B=2,一共有20个类别(C=20)。则输出就是7x7x30的一个tensor。
整个网络结构如下图所示: -
在test的时候,每个网格预测的class信息和bounding box预测的confidence信息相乘,就得到每个bounding box的class-specific confidence score:
等式左边第一项就是每个网格预测的类别信息,第二三项就是每个bounding box预测的confidence。这个乘积即encode了预测的box属于某一类的概率,也有该box准确度的信息。
-
得到每个box的class-specific confidence score以后,设置阈值,滤掉得分低的boxes,对保留的boxes进行NMS处理,就得到最终的检测结果。
3.YOLO的实现细节
-
每个grid有30维,这30维中,8维是回归box的坐标,2维是box的confidence,还有20维是类别。
其中坐标的x,y用对应网格的offset归一化到0-1之间,w,h用图像的width和height归一化到0-1之间。 -
在实现中,最主要的就是怎么设计损失函数,让这个三个方面得到很好的平衡。作者简单粗暴的全部采用了sum-squared error loss来做这件事。
这种做法存在以下几个问题:
第一,8维的localization error和20维的classification error同等重要显然是不合理的;
第二,如果一个网格中没有object(一幅图中这种网格很多),那么就会将这些网格中的box的confidence push到0,相比于较少的有object的网格,这种做法是overpowering的,这会导致网络不稳定甚至发散。
解决办法:- 更重视8维的坐标预测,给这些损失前面赋予更大的loss weight, 记为
在pascal VOC训练中取5。
- 对没有object的box的confidence loss,赋予小的loss weight,记为
在pascal VOC训练中取0.5。
- 有object的box的confidence loss和类别的loss的loss weight正常取1。
- 更重视8维的坐标预测,给这些损失前面赋予更大的loss weight, 记为
-
对不同大小的box预测中,相比于大box预测偏一点,小box预测偏一点肯定更不能被忍受的。而sum-square error loss中对同样的偏移loss是一样。
为了缓和这个问题,作者用了一个比较取巧的办法,就是将box的width和height取平方根代替原本的height和width(convex func 就行?)。这个参考下面的图很容易理解,小box的横轴值较小,发生偏移时,反应到y轴上相比大box要大。 -
一个网格预测多个box,希望的是每个box predictor专门负责预测某个object。具体做法就是看当前预测的box与ground truth box中哪个IoU大,就负责哪个。这种做法称作box predictor的specialization。
- 最后整个的损失函数如下所示:
这个损失函数中:
- 只有当某个网格中有object的时候才对classification error进行惩罚。
- 只有当某个box predictor对某个ground truth box负责的时候,才会对box的coordinate error进行惩罚,而对哪个ground truth box负责就看其预测值和ground truth box的IoU是不是在那个cell的所有box中最大。
- 其他细节,例如使用激活函数使用leak RELU,模型用ImageNet预训练等等,在这里就不一一赘述了。
4.YOLO的缺点
-
YOLO对相互靠的很近的物体,还有很小的群体 检测效果不好,这是因为一个网格中只预测了两个框,并且只属于一类。
-
对测试图像中,同一类物体出现的新的不常见的长宽比和其他情况是。泛化能力偏弱。
-
由于损失函数的问题,定位误差是影响检测效果的主要原因。尤其是大小物体的处理上,还有待加强。
YoLo2:
PPT
https://docs.google.com/presentation/d/14qBAiyhMOFl_wZW4dA1CkixgXwf0zKGbpw_0oHK8yEM/edit#slide=id.g23f389e290_0_12
YOLOv2 论文笔记
论文地址:YOLO9000: Better, Faster, Stronger
项目主页:YOLO: Real-Time Object Detection
(最近博客下很多人请求Caffe 代码,受人所托,已经不再提供,且关闭本文评论,望请见谅)
概述
时隔一年,YOLO(You Only Look Once: Unified, Real-Time Object Detection)从v1版本进化到了v2版本,作者在darknet主页先行一步放出源代码,论文在我们等候之下终于在12月25日发布出来,本文对论文重要部分进行了翻译理解工作,不一定完全对,如有疑问,欢迎讨论。博主如果有新的理解,也会更新文章。
新的YOLO版本论文全名叫“YOLO9000: Better, Faster, Stronger”,主要有两个大方面的改进:
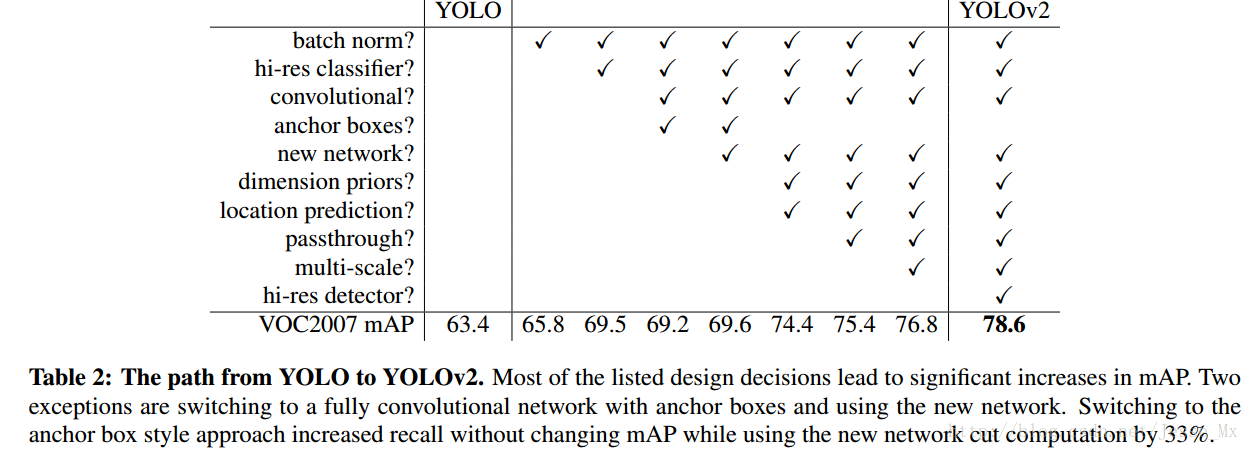
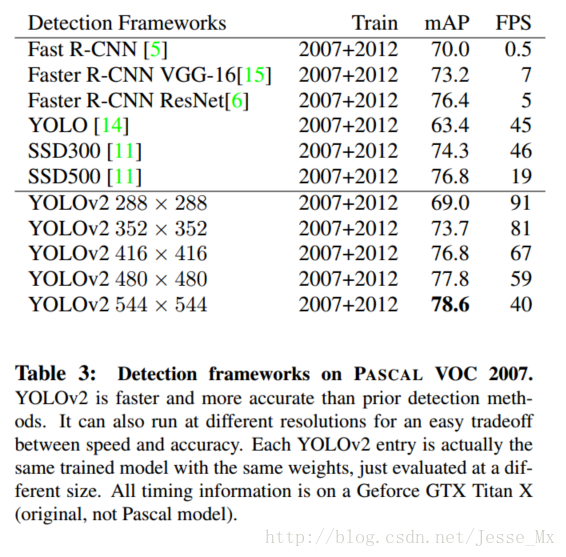
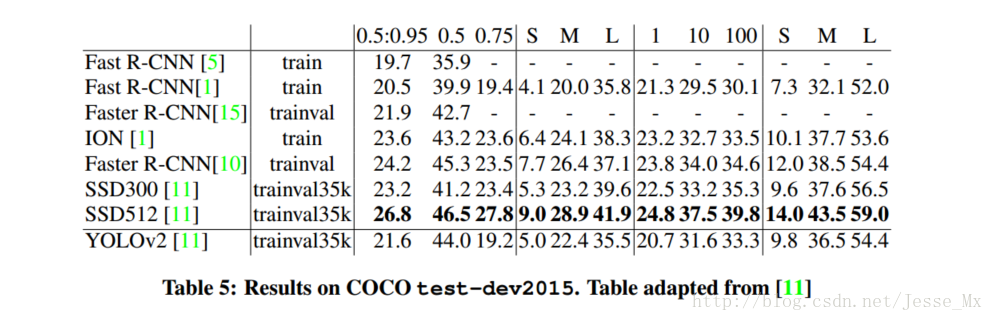
第一,作者使用了一系列的方法对原来的YOLO多目标检测框架进行了改进,在保持原有速度的优势之下,精度上得以提升。VOC 2007数据集测试,67FPS下mAP达到76.8%,40FPS下mAP达到78.6%,基本上可以与Faster R-CNN和SSD一战。这一部分是本文主要关心的地方。
第二,作者提出了一种目标分类与检测的联合训练方法,通过这种方法,YOLO9000可以同时在COCO和ImageNet数据集中进行训练,训练后的模型可以实现多达9000种物体的实时检测。这一方面本文暂时不涉及,待后面有时间再补充。
回顾YOLOv1
YOLOv2始终是在v1版本上作出的改进,我们先简单回顾YOLOv1的检测步骤:
(1) 给个一个输入图像,首先将图像划分成7 * 7的网格。
(2) 对于每个网格,每个网格预测2个bouding box(每个box包含5个预测量)以及20个类别概率,总共输出7×7×(2*5+20)=1470个tensor
(3) 根据上一步可以预测出7 * 7 * 2 = 98个目标窗口,然后根据阈值去除可能性比较低的目标窗口,再由NMS去除冗余窗口即可。
YOLOv1使用了end-to-end的回归方法,没有region proposal步骤,直接回归便完成了位置和类别的判定。种种原因使得YOLOv1在目标定位上不那么精准,直接导致YOLO的检测精度并不是很高。
YOLO检测原理参考推荐博客:论文阅读:You Only Look Once: Unified, Real-Time Object Detection
YOLOv2精度的改进(Better)
先来一个总览图,看看它到底用了多少技巧,以及这些技巧起了多少作用:
Batch Normalization
CNN在训练过程中网络每层输入的分布一直在改变, 会使训练过程难度加大,但可以通过normalize每层的输入解决这个问题。新的YOLO网络在每一个卷积层后添加batch normalization,通过这一方法,mAP获得了2%的提升。batch normalization 也有助于规范化模型,可以在舍弃dropout优化后依然不会过拟合。
High Resolution Classifier
目前的目标检测方法中,基本上都会使用ImageNet预训练过的模型(classifier)来提取特征,如果用的是AlexNet网络,那么输入图片会被resize到不足256 * 256,导致分辨率不够高,给检测带来困难。为此,新的YOLO网络把分辨率直接提升到了448 * 448,这也意味之原有的网络模型必须进行某种调整以适应新的分辨率输入。
对于YOLOv2,作者首先对分类网络(自定义的darknet)进行了fine tune,分辨率改成448 * 448,在ImageNet数据集上训练10轮(10 epochs),训练后的网络就可以适应高分辨率的输入了。然后,作者对检测网络部分(也就是后半部分)也进行fine tune。这样通过提升输入的分辨率,mAP获得了4%的提升。
Convolutional With Anchor Boxes
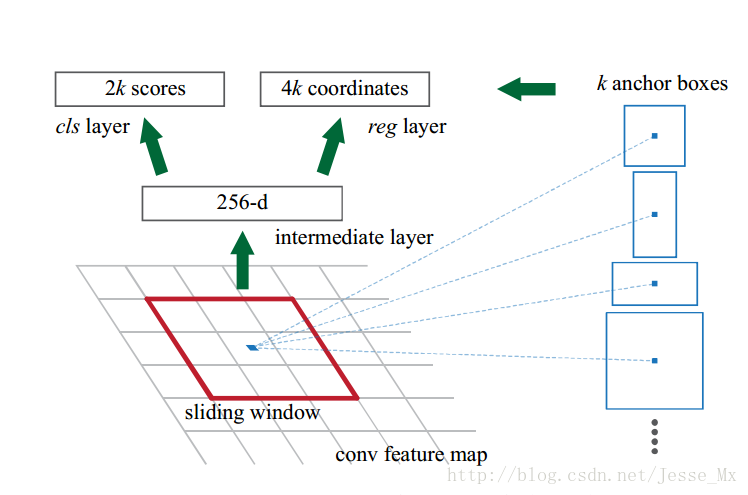
之前的YOLO利用全连接层的数据完成边框的预测,导致丢失较多的空间信息,定位不准。作者在这一版本中借鉴了Faster R-CNN中的anchor思想,回顾一下,anchor是RNP网络中的一个关键步骤,说的是在卷积特征图上进行滑窗操作,每一个中心可以预测9种不同大小的建议框。看到YOLOv2的这一借鉴,我只能说SSD的作者是有先见之明的。
为了引入anchor boxes来预测bounding boxes,作者在网络中果断去掉了全连接层。剩下的具体怎么操作呢?首先,作者去掉了后面的一个池化层以确保输出的卷积特征图有更高的分辨率。然后,通过缩减网络,让图片输入分辨率为416 * 416,这一步的目的是为了让后面产生的卷积特征图宽高都为奇数,这样就可以产生一个center cell。作者观察到,大物体通常占据了图像的中间位置, 就可以只用中心的一个cell来预测这些物体的位置,否则就要用中间的4个cell来进行预测,这个技巧可稍稍提升效率。最后,YOLOv2使用了卷积层降采样(factor为32),使得输入卷积网络的416 * 416图片最终得到13 * 13的卷积特征图(416/32=13)。
加入了anchor boxes后,可以预料到的结果是召回率上升,准确率下降。我们来计算一下,假设每个cell预测9个建议框,那么总共会预测13 * 13 * 9 = 1521个boxes,而之前的网络仅仅预测7 * 7 * 2 = 98个boxes。具体数据为:没有anchor boxes,模型recall为81%,mAP为69.5%;加入anchor boxes,模型recall为88%,mAP为69.2%。这样看来,准确率只有小幅度的下降,而召回率则提升了7%,说明可以通过进一步的工作来加强准确率,的确有改进空间。
Dimension Clusters(维度聚类)
作者在使用anchor的时候遇到了两个问题,第一个是anchor boxes的宽高维度往往是精选的先验框(hand-picked priors),虽说在训练过程中网络也会学习调整boxes的宽高维度,最终得到准确的bounding boxes。但是,如果一开始就选择了更好的、更有代表性的先验boxes维度,那么网络就更容易学到准确的预测位置。
和以前的精选boxes维度不同,作者使用了K-means聚类方法类训练bounding boxes,可以自动找到更好的boxes宽高维度。传统的K-means聚类方法使用的是欧氏距离函数,也就意味着较大的boxes会比较小的boxes产生更多的error,聚类结果可能会偏离。为此,作者采用的评判标准是IOU得分(也就是boxes之间的交集除以并集),这样的话,error就和box的尺度无关了,最终的距离函数为:

作者通过改进的K-means对训练集中的boxes进行了聚类,判别标准是平均IOU得分,聚类结果如下图:
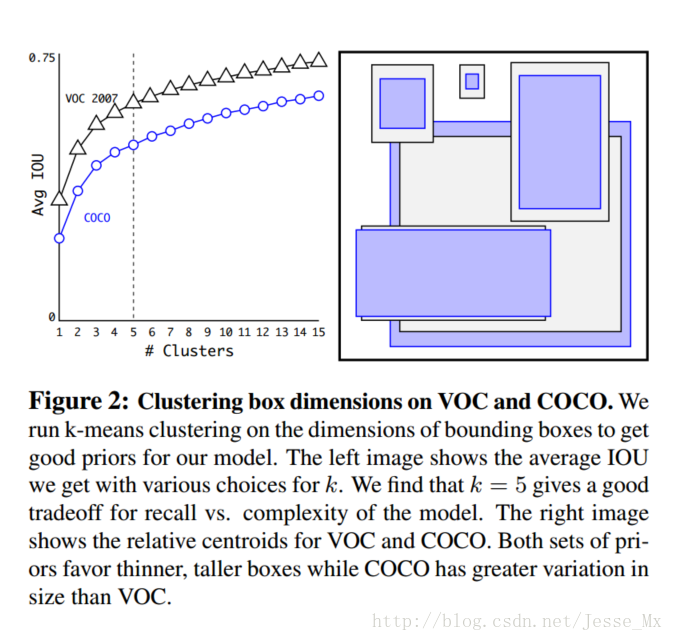
可以看到,平衡复杂度和IOU之后,最终得到k值为5,意味着作者选择了5种大小的box维度来进行定位预测,这与手动精选的box维度不同。结果中扁长的框较少,而瘦高的框更多(这符合行人的特征),这种结论如不通过聚类实验恐怕是发现不了的。
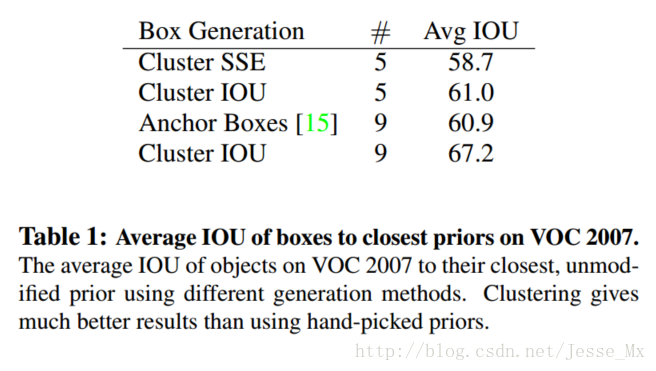
当然,作者也做了实验来对比两种策略的优劣,如下图,使用聚类方法,仅仅5种boxes的召回率就和Faster R-CNN的9种相当。说明K-means方法的引入使得生成的boxes更具有代表性,为后面的检测任务提供了便利。
Direct location prediction(直接位置预测)
那么,作者在使用anchor boxes时发现的第二个问题就是:模型不稳定,尤其是在早期迭代的时候。大部分的不稳定现象出现在预测box的
坐标上了。在区域建议网络中,预测
以及
,
使用的是如下公式:

后来修改博文时,发现这个公式有误,作者应该是把加号写成了减号。理由如下,anchor的预测公式来自于Faster-RCNN,我们来看看人家是怎么写的:
公式中,符号的含义解释一下:
是坐标预测值,
是anchor坐标(预设固定值),
是坐标真实值(标注信息),其他变量
,
,
以此类推,
变量是偏移量。然后把前两个公式变形,就可以得到正确的公式:
这个公式的理解为:当预测
,就会把box向右边移动一定距离(具体为anchor box的宽度),预测
,就会把box向左边移动相同的距离。
这个公式没有任何限制,使得无论在什么位置进行预测,任何anchor boxes可以在图像中任意一点结束(我的理解是,
没有数值限定,可能会出现anchor检测很远的目标box的情况,效率比较低。正确做法应该是每一个anchor只负责检测周围正负一个单位以内的目标box)。模型随机初始化后,需要花很长一段时间才能稳定预测敏感的物体位置。
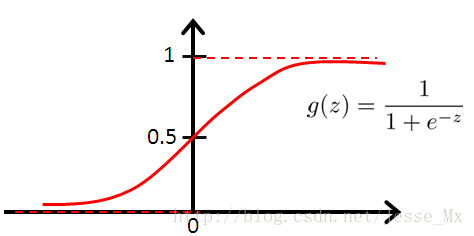
在此,作者就没有采用预测直接的offset的方法,而使用了预测相对于grid cell的坐标位置的办法,作者又把ground truth限制在了0到1之间,利用logistic回归函数来进行这一限制。
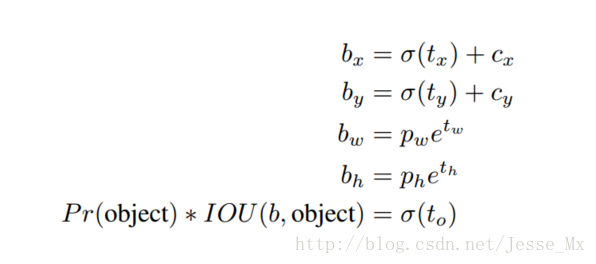
现在,神经网络在特征图(13 *13 )的每个cell上预测5个bounding boxes(聚类得出的值),同时每一个bounding box预测5个坐值,分别为
,其中前四个是坐标,
是置信度。如果这个cell距离图像左上角的边距为
以及该cell对应box(bounding box prior)的长和宽分别为
,那么预测值可以表示为:
这几个公式参考上面Faster-RCNN和YOLOv1的公式以及下图就比较容易理解。
经sigmod函数处理过,取值限定在了0~1,实际意义就是使anchor只负责周围的box,有利于提升效率和网络收敛。
函数的意义没有给,但估计是把归一化值转化为图中真实值,使用
的幂函数是因为前面做了
计算,因此,
是bounding box的中心相对栅格左上角的横坐标,
是纵坐标,
是bounding box的confidence score。
定位预测值被归一化后,参数就更容易得到学习,模型就更稳定。作者使用Dimension Clusters和Direct location prediction这两项anchor boxes改进方法,mAP获得了5%的提升。
Fine-Grained Features(细粒度特征)
上述网络上的修改使YOLO最终在13 * 13的特征图上进行预测,虽然这足以胜任大尺度物体的检测,但是用上细粒度特征的话,这可能对小尺度的物体检测有帮助。Faser R-CNN和SSD都在不同层次的特征图上产生区域建议(SSD直接就可看得出来这一点),获得了多尺度的适应性。这里使用了一种不同的方法,简单添加了一个转移层( passthrough layer),这一层要把浅层特征图(分辨率为26 * 26,是底层分辨率4倍)连接到深层特征图。
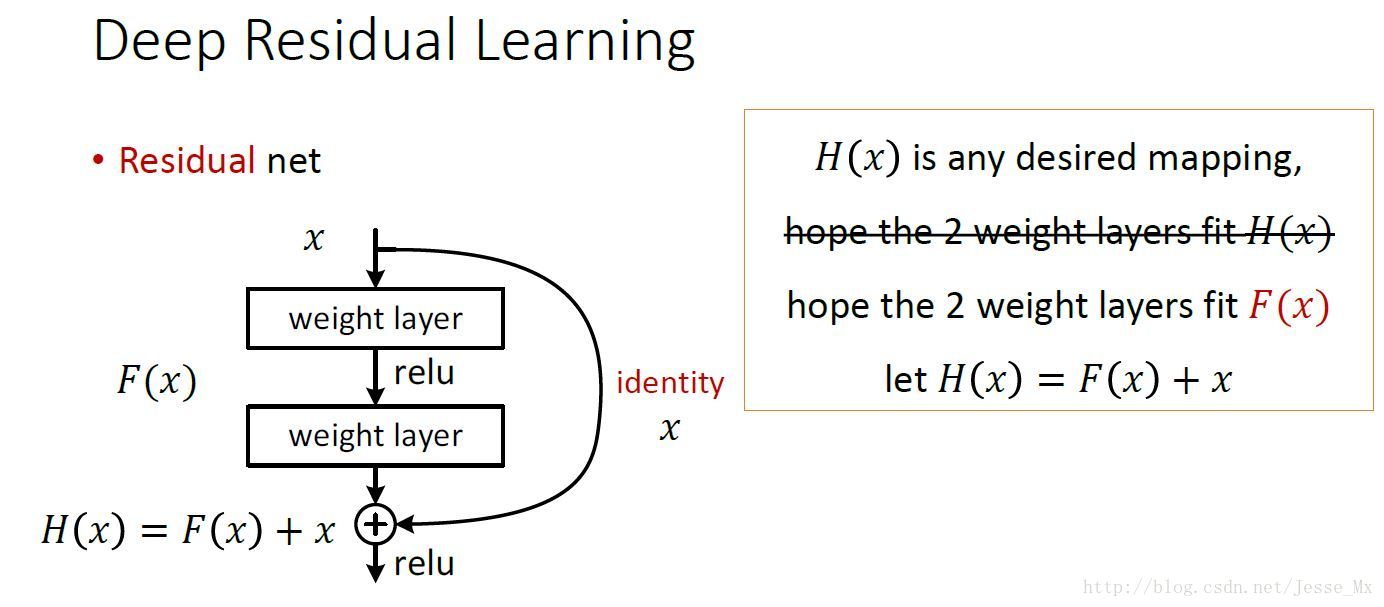
这个转移层也就是把高低两种分辨率的特征图做了一次连结,连接方式是叠加特征到不同的通道而不是空间位置,类似于Resnet中的identity mappings。这个方法把26 * 26 * 512的特征图连接到了13 * 13 * 2048的特征图,这个特征图与原来的特征相连接。YOLO的检测器使用的就是经过扩张的特征图,它可以拥有更好的细粒度特征,使得模型的性能获得了1%的提升。(这段理解的也不是很好,要看到网络结构图才能清楚)
补充:关于passthrough layer,具体来说就是特征重排(不涉及到参数学习),前面26 * 26 * 512的特征图使用按行和按列隔行采样的方法,就可以得到4个新的特征图,维度都是13 * 13 * 512,然后做concat操作,得到13 * 13 * 2048的特征图,将其拼接到后面的层,相当于做了一次特征融合,有利于检测小目标。
Multi-Scale Training
原来的YOLO网络使用固定的448 * 448的图片作为输入,现在加入anchor boxes后,输入变成了416 * 416。目前的网络只用到了卷积层和池化层,那么就可以进行动态调整(意思是可检测任意大小图片)。作者希望YOLOv2具有不同尺寸图片的鲁棒性,因此在训练的时候也考虑了这一点。
不同于固定输入网络的图片尺寸的方法,作者在几次迭代后就会微调网络。没经过10次训练(10 epoch),就会随机选择新的图片尺寸。YOLO网络使用的降采样参数为32,那么就使用32的倍数进行尺度池化{320,352,…,608}。最终最小的尺寸为320 * 320,最大的尺寸为608 * 608。接着按照输入尺寸调整网络进行训练。
这种机制使得网络可以更好地预测不同尺寸的图片,意味着同一个网络可以进行不同分辨率的检测任务,在小尺寸图片上YOLOv2运行更快,在速度和精度上达到了平衡。
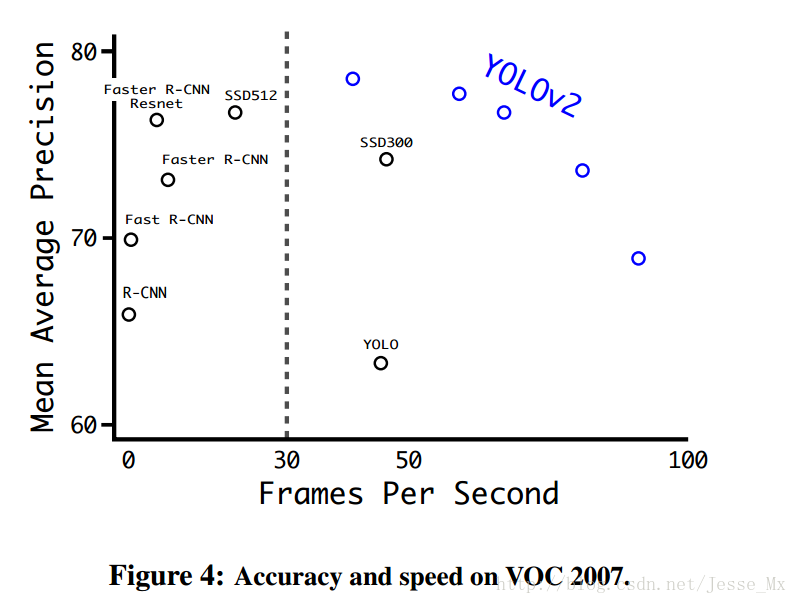
在小尺寸图片检测中,YOLOv2成绩很好,输入为228 * 228的时候,帧率达到90FPS,mAP几乎和Faster R-CNN的水准相同。使得其在低性能GPU、高帧率视频、多路视频场景中更加适用。
在大尺寸图片检测中,YOLOv2达到了先进水平,VOC2007 上mAP为78.6%,仍然高于平均水准,下图是YOLOv2和其他网络的成绩对比:
Further Experiments
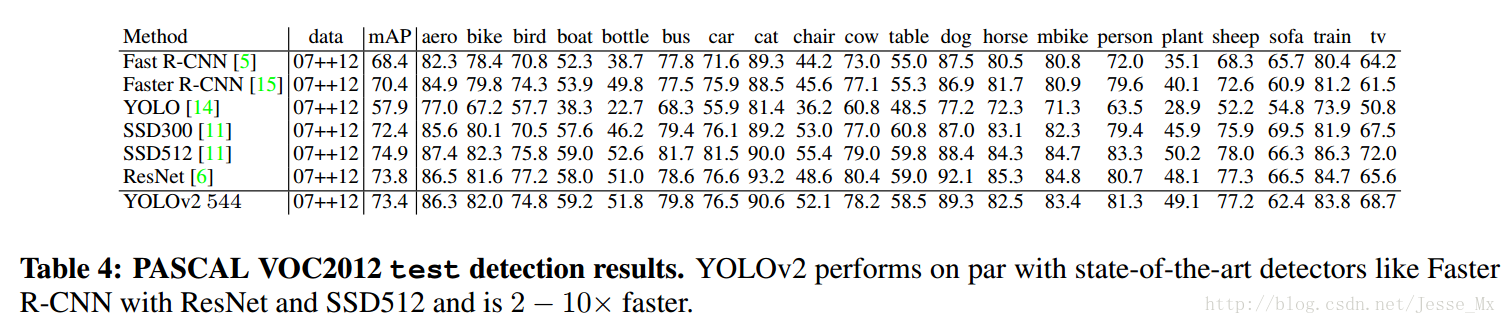
作者在VOC2012上对YOLOv2进行训练,下图是和其他方法的对比。YOLOv2精度达到了73.4%,并且速度更快。同时YOLOV2也在COCO上做了测试(IOU=0.5),也和Faster R-CNN、SSD作了成绩对比。总的来说,比上不足,比下有余。
YOLOv2速度的改进(Faster)
YOLO一向是速度和精度并重,作者为了改善检测速度,也作了一些相关工作。
大多数检测网络有赖于VGG-16作为特征提取部分,VGG-16的确是一个强大而准确的分类网络,但是复杂度有些冗余。224 * 224的图片进行一次前向传播,其卷积层就需要多达306.9亿次浮点数运算。
YOLOv2使用的是基于Googlenet的定制网络,比VGG-16更快,一次前向传播仅需85.2亿次运算。可是它的精度要略低于VGG-16,单张224 * 224取前五个预测概率的对比成绩为88%和90%(低一点点也是可以接受的)。
Darknet-19
YOLOv2使用了一个新的分类网络作为特征提取部分,参考了前人的先进经验,比如类似于VGG,作者使用了较多的3 * 3卷积核,在每一次池化操作后把通道数翻倍。借鉴了network in network的思想,网络使用了全局平均池化(global average pooling),把1 * 1的卷积核置于3 * 3的卷积核之间,用来压缩特征。也用了batch normalization(前面介绍过)稳定模型训练。
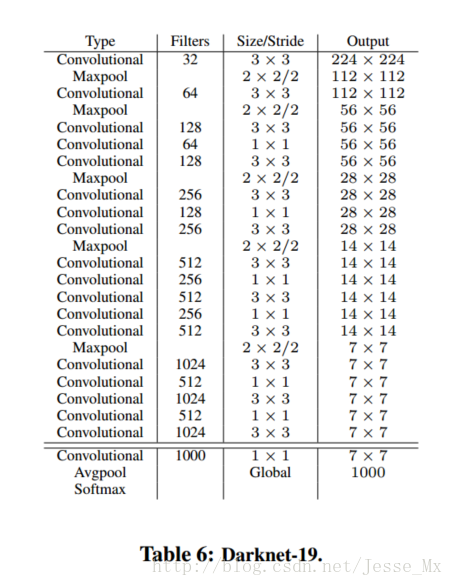
最终得出的基础模型就是Darknet-19,如下图,其包含19个卷积层、5个最大值池化层(maxpooling layers ),下图展示网络具体结构。Darknet-19运算次数为55.8亿次,imagenet图片分类top-1准确率72.9%,top-5准确率91.2%。
Training for classification
作者使用Darknet-19在标准1000类的ImageNet上训练了160次,用的随机梯度下降法,starting learning rate 为0.1,polynomial rate decay 为4,weight decay为0.0005 ,momentum 为0.9。训练的时候仍然使用了很多常见的数据扩充方法(data augmentation),包括random crops, rotations, and hue, saturation, and exposure shifts。 (这些训练参数是基于darknet框架,和caffe不尽相同)
初始的224 * 224训练后,作者把分辨率上调到了448 * 448,然后又训练了10次,学习率调整到了0.001。高分辨率下训练的分类网络在top-1准确率76.5%,top-5准确率93.3%。
Training for detection
分类网络训练完后,就该训练检测网络了,作者去掉了原网络最后一个卷积层,转而增加了三个3 * 3 * 1024的卷积层(可参考darknet中cfg文件),并且在每一个上述卷积层后面跟一个1 * 1的卷积层,输出维度是检测所需的数量。对于VOC数据集,预测5种boxes大小,每个box包含5个坐标值和20个类别,所以总共是5 * (5+20)= 125个输出维度。同时也添加了转移层(passthrough layer ),从最后那个3 * 3 * 512的卷积层连到倒数第二层,使模型有了细粒度特征。
作者的检测模型以0.001的初始学习率训练了160次,在60次和90次的时候,学习率减为原来的十分之一。其他的方面,weight decay为0.0005,momentum为0.9,依然使用了类似于Faster-RCNN和SSD的数据扩充(data augmentation)策略。
YOLOv2分类的改进(Stronger)
这一部分,作者使用联合训练方法,结合wordtree等方法,使YOLOv2的检测种类扩充到了上千种,具体内容待续。
总结和展望
作者大概说的是,之前的技术改进对检测任务很有帮助,在以后的工作中,可能会涉足弱监督方法用于图像分割。监督学习对于标记数据的要求很高,未来要考虑弱标记的技术,这将会极大扩充数据集,提升训练量。
扩展阅读:deepsystems.io:Illustration of YOLO
<机器爱学习>YOLOv2 / YOLO9000 深入理解
YOLOv2相对v1版本,在继续保持处理速度的基础上,从预测更准确(Better),速度更快(Faster),识别对象更多(Stronger)这三个方面进行了改进。其中识别更多对象也就是扩展到能够检测9000种不同对象,称之为YOLO9000。
本文讨论YOLOv2的内容,关于YOLO v1和v3的内容,请参考 YOLO v1深入理解 和 YOLO v3深入理解。下面具体看下YOLO2都做了哪些改进。
预测更准确(Better)
论文[1]中给出了下面的改进项目列表,列出各项改进对mAP的提升效果。
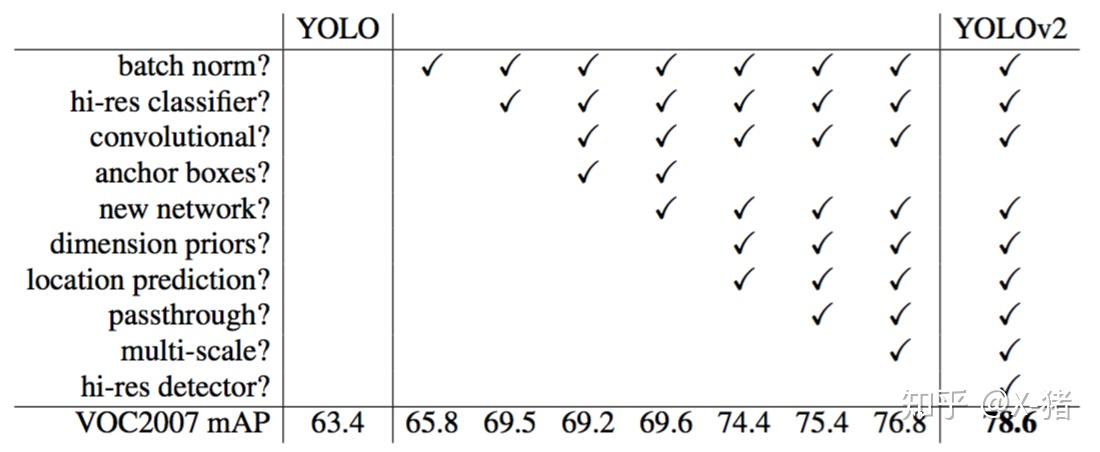 图1 YOLOv1到YOLOv2
图1 YOLOv1到YOLOv2
1)batch normalization(批归一化)
批归一化使mAP有2.4的提升。
批归一化有助于解决反向传播过程中的梯度消失和梯度爆炸问题,降低对一些超参数(比如学习率、网络参数的大小范围、激活函数的选择)的敏感性,并且每个batch分别进行归一化的时候,起到了一定的正则化效果(YOLO2不再使用dropout),从而能够获得更好的收敛速度和收敛效果。
通常,一次训练会输入一批样本(batch)进入神经网络。批规一化在神经网络的每一层,在网络(线性变换)输出后和激活函数(非线性变换)之前增加一个批归一化层(BN),BN层进行如下变换:①对该批样本的各特征量(对于中间层来说,就是每一个神经元)分别进行归一化处理,分别使每个特征的数据分布变换为均值0,方差1。从而使得每一批训练样本在每一层都有类似的分布。这一变换不需要引入额外的参数。②对上一步的输出再做一次线性变换,假设上一步的输出为Z,则Z1=γZ + β。这里γ、β是可以训练的参数。增加这一变换是因为上一步骤中强制改变了特征数据的分布,可能影响了原有数据的信息表达能力。增加的线性变换使其有机会恢复其原本的信息。
关于批规一化的更多信息可以参考 Batch Normalization原理与实战。
2)使用高分辨率图像微调分类模型
mAP提升了3.7。
图像分类的训练样本很多,而标注了边框的用于训练对象检测的样本相比而言就比较少了,因为标注边框的人工成本比较高。所以对象检测模型通常都先用图像分类样本训练卷积层,提取图像特征。但这引出的另一个问题是,图像分类样本的分辨率不是很高。所以YOLO v1使用ImageNet的图像分类样本采用 224*224 作为输入,来训练CNN卷积层。然后在训练对象检测时,检测用的图像样本采用更高分辨率的 448*448 的图像作为输入。但这样切换对模型性能有一定影响。
所以YOLO2在采用 224*224 图像进行分类模型预训练后,再采用 448*448 的高分辨率样本对分类模型进行微调(10个epoch),使网络特征逐渐适应 448*448 的分辨率。然后再使用 448*448 的检测样本进行训练,缓解了分辨率突然切换造成的影响。
3)采用先验框(Anchor Boxes)
召回率大幅提升到88%,同时mAP轻微下降了0.2。
借鉴Faster RCNN的做法,YOLO2也尝试采用先验框(anchor)。在每个grid预先设定一组不同大小和宽高比的边框,来覆盖整个图像的不同位置和多种尺度,这些先验框作为预定义的候选区在神经网络中将检测其中是否存在对象,以及微调边框的位置。
同时YOLO2移除了全连接层。另外去掉了一个池化层,使网络卷积层输出具有更高的分辨率。
之前YOLO1并没有采用先验框,并且每个grid只预测两个bounding box,整个图像98个。YOLO2如果每个grid采用9个先验框,总共有13*13*9=1521个先验框。所以,相对YOLO1的81%的召回率,YOLO2的召回率大幅提升到88%。同时mAP有0.2%的轻微下降。
不过YOLO2接着进一步对先验框进行了改良。
4)聚类提取先验框尺度
聚类提取先验框尺度,结合下面的约束预测边框的位置,使得mAP有4.8的提升。
之前先验框都是手工设定的,YOLO2尝试统计出更符合样本中对象尺寸的先验框,这样就可以减少网络微调先验框到实际位置的难度。YOLO2的做法是对训练集中标注的边框进行聚类分析,以寻找尽可能匹配样本的边框尺寸。
聚类算法最重要的是选择如何计算两个边框之间的“距离”,对于常用的欧式距离,大边框会产生更大的误差,但我们关心的是边框的IOU。所以,YOLO2在聚类时采用以下公式来计算两个边框之间的“距离”。 centroid是聚类时被选作中心的边框,box就是其它边框,d就是两者间的“距离”。IOU越大,“距离”越近。YOLO2给出的聚类分析结果如下图所示:
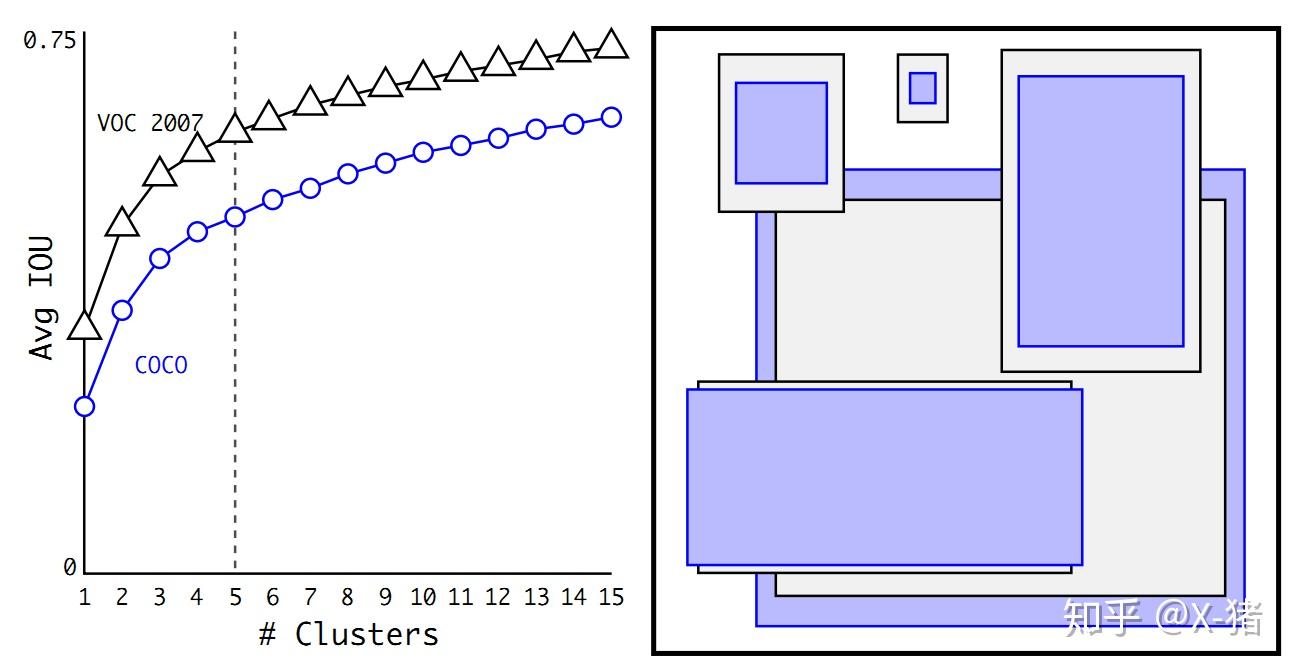 图2 边框聚类分析
图2 边框聚类分析
上图左边是选择不同的聚类k值情况下,得到的k个centroid边框,计算样本中标注的边框与各centroid的Avg IOU。显然,边框数k越多,Avg IOU越大。YOLO2选择k=5作为边框数量与IOU的折中。对比手工选择的先验框,使用5个聚类框即可达到61 Avg IOU,相当于9个手工设置的先验框60.9 Avg IOU。
上图右边显示了5种聚类得到的先验框,VOC和COCO数据集略有差异,不过都有较多的瘦高形边框。
5)约束预测边框的位置
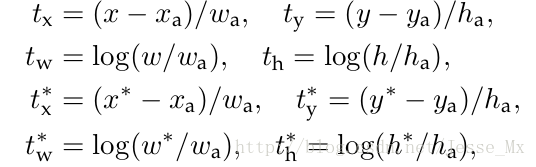
借鉴于Faster RCNN的先验框方法,在训练的早期阶段,其位置预测容易不稳定。其位置预测公式为:
其中, 是预测边框的中心,
是先验框(anchor)的中心点坐标,
是先验框(anchor)的宽和高,
是要学习的参数。 注意,YOLO论文中写的是
,根据Faster RCNN,应该是"+"。
由于 的取值没有任何约束,因此预测边框的中心可能出现在任何位置,训练早期阶段不容易稳定。YOLO调整了预测公式,将预测边框的中心约束在特定gird网格内。
其中, 是预测边框的中心和宽高。
是预测边框的置信度,YOLO1是直接预测置信度的值,这里对预测参数
进行σ变换后作为置信度的值。
是当前网格左上角到图像左上角的距离,要先将网格大小归一化,即令一个网格的宽=1,高=1。
是先验框的宽和高。 σ是sigmoid函数。
是要学习的参数,分别用于预测边框的中心和宽高,以及置信度。
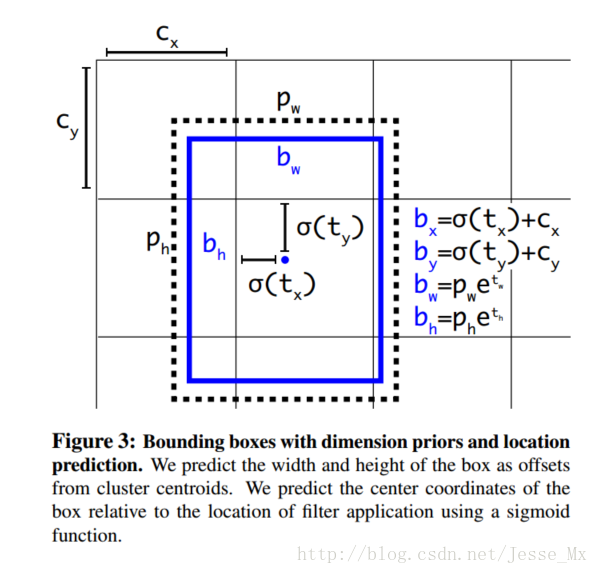
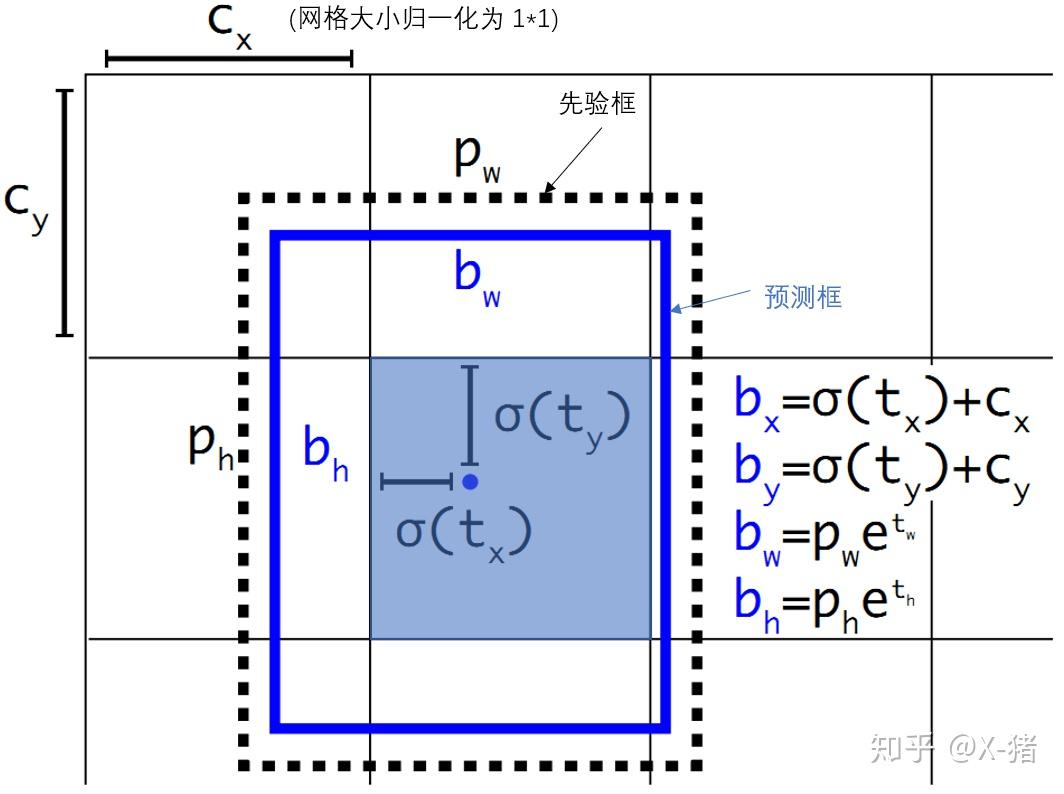 图3 边框预测
图3 边框预测
参考上图,由于σ函数将 约束在(0,1)范围内,所以根据上面的计算公式,预测边框的蓝色中心点被约束在蓝色背景的网格内。约束边框位置使得模型更容易学习,且预测更为稳定。
6)passthrough层检测细粒度特征
passthrough层检测细粒度特征使mAP提升1。
对象检测面临的一个问题是图像中对象会有大有小,输入图像经过多层网络提取特征,最后输出的特征图中(比如YOLO2中输入416*416经过卷积网络下采样最后输出是13*13),较小的对象可能特征已经不明显甚至被忽略掉了。为了更好的检测出一些比较小的对象,最后输出的特征图需要保留一些更细节的信息。
YOLO2引入一种称为passthrough层的方法在特征图中保留一些细节信息。具体来说,就是在最后一个pooling之前,特征图的大小是26*26*512,将其1拆4,直接传递(passthrough)到pooling后(并且又经过一组卷积)的特征图,两者叠加到一起作为输出的特征图。
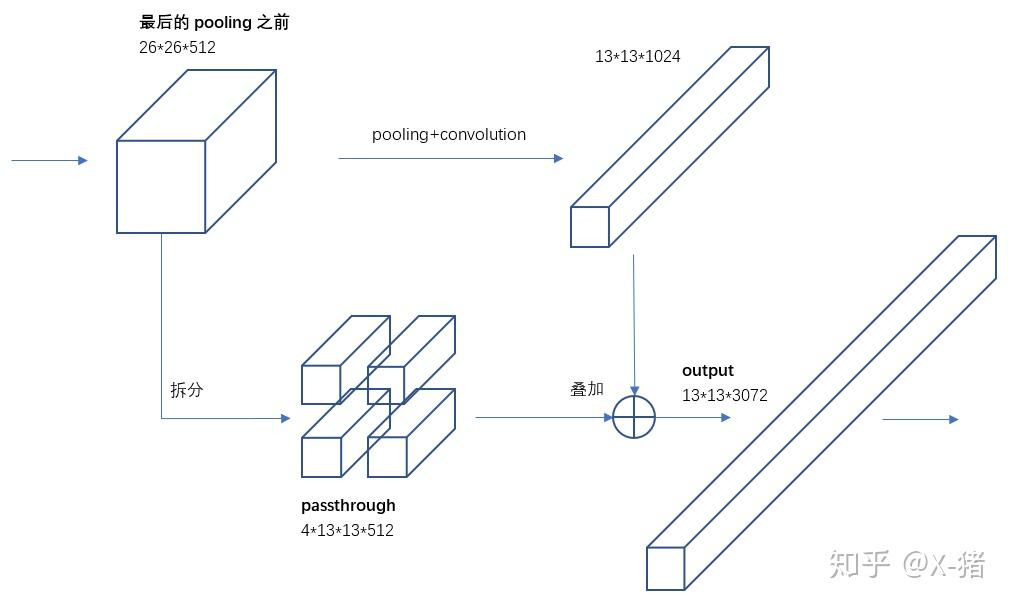 图4 passthrough
图4 passthrough
具体怎样1拆4,下面借用参考文章[3]中的一副图看的很清楚。图中示例的是1个4*4拆成4个2*2。因为深度不变,所以没有画出来。
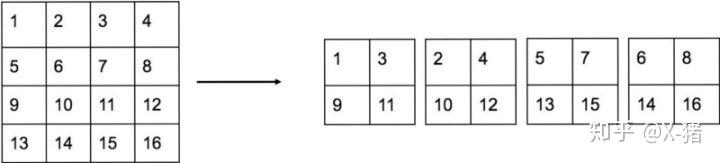 图5 passthrough 1拆4
图5 passthrough 1拆4
另外,根据YOLO2的代码,特征图先用1*1卷积从 26*26*512 降维到 26*26*64,再做1拆4并passthrough。下面图6有更详细的网络输入输出结构。
7)多尺度图像训练
多尺度图像训练对mAP有1.4的提升。
因为去掉了全连接层,YOLO2可以输入任何尺寸的图像。因为整个网络下采样倍数是32,作者采用了{320,352,...,608}等10种输入图像的尺寸,这些尺寸的输入图像对应输出的特征图宽和高是{10,11,...19}。训练时每10个batch就随机更换一种尺寸,使网络能够适应各种大小的对象检测。
8)高分辨率图像的对象检测
图1表格中最后一行有个hi-res detector,使mAP提高了1.8。因为YOLO2调整网络结构后能够支持多种尺寸的输入图像。通常是使用416*416的输入图像,如果用较高分辨率的输入图像,比如544*544,则mAP可以达到78.6,有1.8的提升。
速度更快(Faster)
为了进一步提升速度,YOLO2提出了Darknet-19(有19个卷积层和5个MaxPooling层)网络结构。DarkNet-19比VGG-16小一些,精度不弱于VGG-16,但浮点运算量减少到约1/5,以保证更快的运算速度。
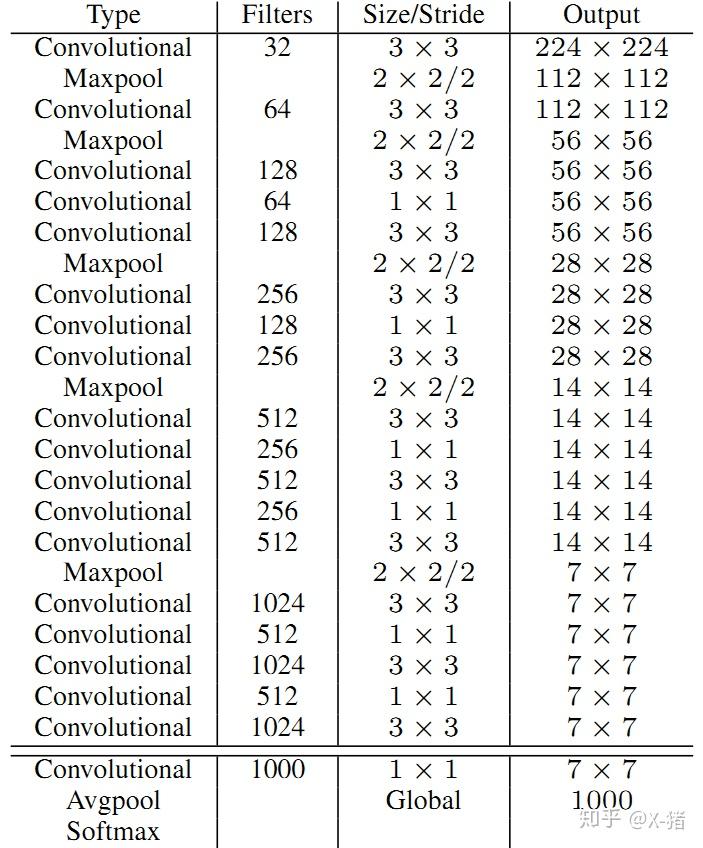 图6 Darknet-19 分类模型
图6 Darknet-19 分类模型
YOLO2的训练主要包括三个阶段。第一阶段就是先在ImageNet分类数据集上预训练Darknet-19,此时模型输入为 224*224 ,共训练160个epochs。然后第二阶段将网络的输入调整为 448*448 ,继续在ImageNet数据集上finetune分类模型,训练10个epochs,此时分类模型的top-1准确度为76.5%,而top-5准确度为93.3%。第三个阶段就是修改Darknet-19分类模型为检测模型,移除最后一个卷积层、global avgpooling层以及softmax层,并且新增了三个 3*3*1024卷积层,同时增加了一个passthrough层,最后使用 1*1 卷积层输出预测结果,输出的channels数为:num_anchors*(5+num_classes) ,和训练采用的数据集有关系。由于anchors数为5,对于VOC数据集(20种分类对象)输出的channels数就是125,最终的预测矩阵T的shape为 (batch_size, 13, 13, 125),可以先将其reshape为 (batch_size, 13, 13, 5, 25) ,其中 T[:, :, :, :, 0:4] 为边界框的位置和大小 ,T[:, :, :, :, 4] 为边界框的置信度,而 T[:, :, :, :, 5:] 为类别预测值。
对象检测模型各层的结构如下(参考文章[4]):
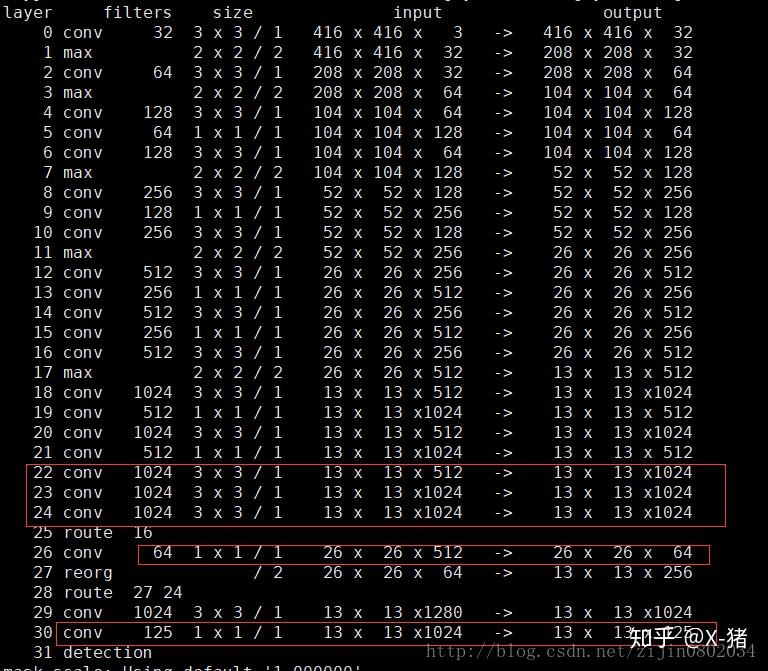 图7 Darknet-19 对象检测模型
图7 Darknet-19 对象检测模型
看一下passthrough层。图中第25层route 16,意思是来自16层的output,即26*26*512,这是passthrough层的来源(细粒度特征)。第26层1*1卷积降低通道数,从512降低到64(这一点论文在讨论passthrough的时候没有提到),输出26*26*64。第27层进行拆分(passthrough层)操作,1拆4分成13*13*256。第28层叠加27层和24层的输出,得到13*13*1280。后面再经过3*3卷积和1*1卷积,最后输出13*13*125。
YOLO2 输入->输出
综上所述,虽然YOLO2做出了一些改进,但总的来说网络结构依然很简单,就是一些卷积+pooling,从416*416*3 变换到 13*13*5*25。稍微大一点的变化是增加了batch normalization,增加了一个passthrough层,去掉了全连接层,以及采用了5个先验框。
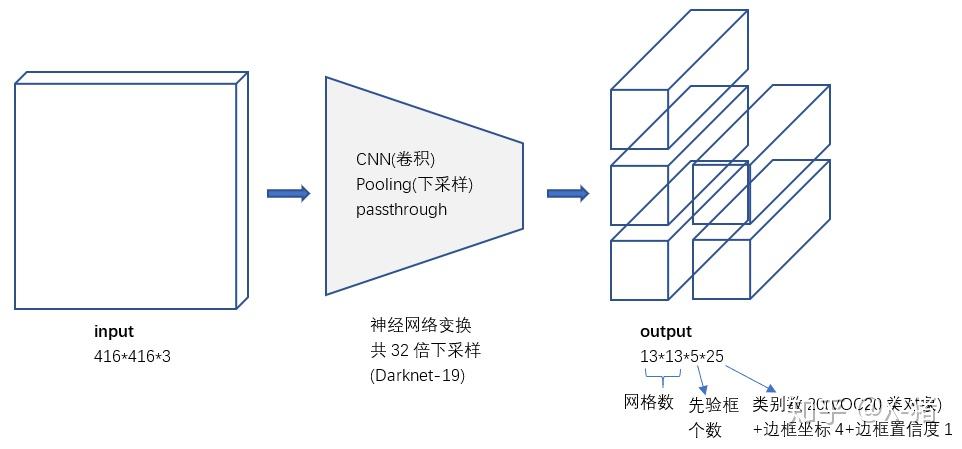 图8 YOLO2 输入 - 输出
图8 YOLO2 输入 - 输出
对比YOLO1的输出张量,YOLO2的主要变化就是会输出5个先验框,且每个先验框都会尝试预测一个对象。输出的 13*13*5*25 张量中,25维向量包含 20个对象的分类概率+4个边框坐标+1个边框置信度。
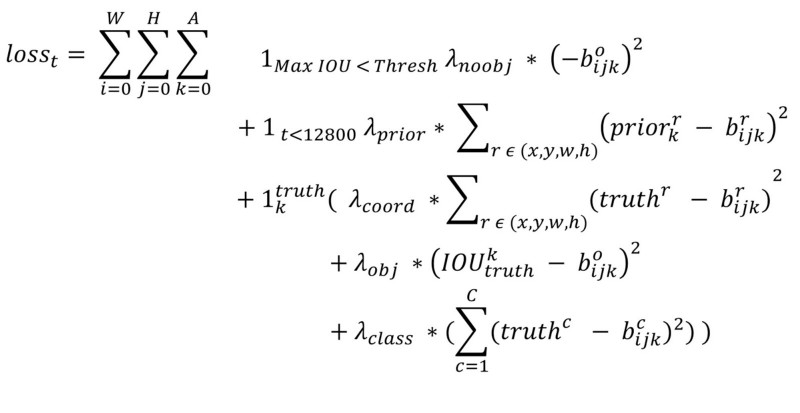
YOLO2 误差函数
误差依然包括边框位置误差、置信度误差、对象分类误差。
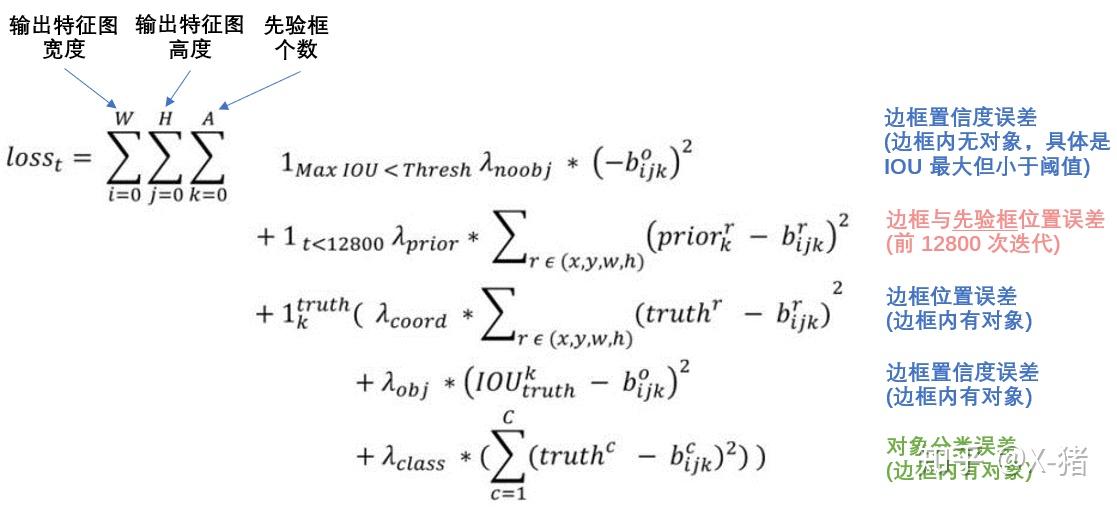 图9 YOLO2误差函数
图9 YOLO2误差函数
公式中:
意思是预测边框中,与真实对象边框IOU最大的那个,其IOU<阈值Thresh,此系数为1,即计入误差,否则为0,不计入误差。YOLO2使用Thresh=0.6。
意思是前128000次迭代计入误差。注意这里是与先验框的误差,而不是与真实对象边框的误差。可能是为了在训练早期使模型更快学会先预测先验框的位置。
意思是该边框负责预测一个真实对象(边框内有对象)。
各种 是不同类型误差的调节系数。
识别对象更多(Stronger)/ YOLO9000
VOC数据集可以检测20种对象,但实际上对象的种类非常多,只是缺少相应的用于对象检测的训练样本。YOLO2尝试利用ImageNet非常大量的分类样本,联合COCO的对象检测数据集一起训练,使得YOLO2即使没有学过很多对象的检测样本,也能检测出这些对象。
基本的思路是,如果是检测样本,训练时其Loss包括分类误差和定位误差,如果是分类样本,则Loss只包括分类误差。
1)构建WordTree
要检测更多对象,比如从原来的VOC的20种对象,扩展到ImageNet的9000种对象。简单来想的话,好像把原来输出20维的softmax改成9000维的softmax就可以了,但是,ImageNet的对象类别与COCO的对象类别不是互斥的。比如COCO对象类别有“狗”,而ImageNet细分成100多个品种的狗,狗与100多个狗的品种是包含关系,而不是互斥关系。一个Norfolk terrier同时也是dog,这样就不适合用单个softmax来做对象分类,而是要采用一种多标签分类模型。
YOLO2于是根据WordNet[5],将ImageNet和COCO中的名词对象一起构建了一个WordTree,以physical object为根节点,各名词依据相互间的关系构建树枝、树叶,节点间的连接表达了对象概念之间的蕴含关系(上位/下位关系)。
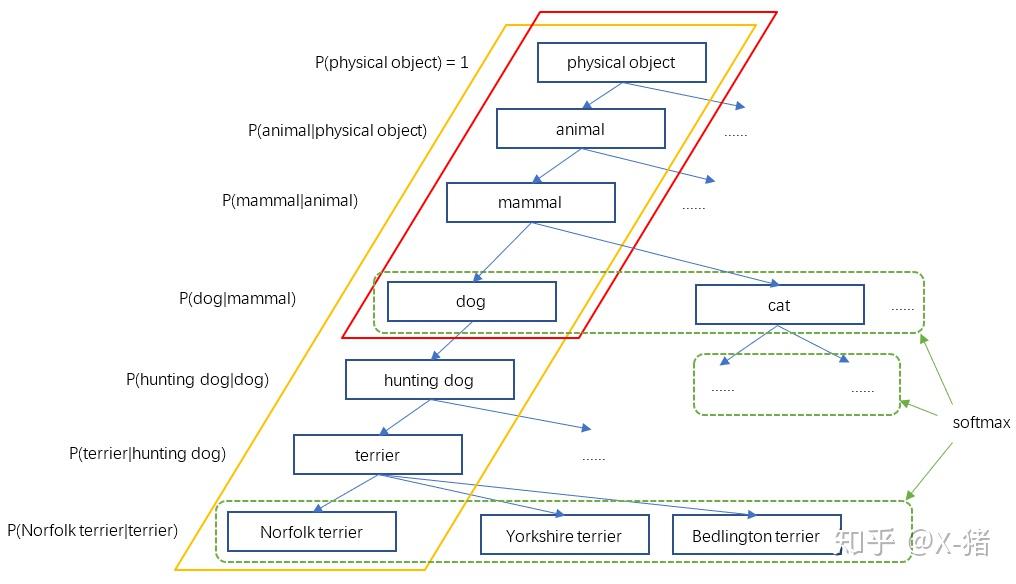 图10 WordTree
图10 WordTree
整个WordTree中的对象之间不是互斥的关系,但对于单个节点,属于它的所有子节点之间是互斥关系。比如terrier节点之下的Norfolk terrier、Yorkshire terrier、Bedlington terrier等,各品种的terrier之间是互斥的,所以计算上可以进行softmax操作。上面图10只画出了3个softmax作为示意,实际中每个节点下的所有子节点都会进行softmax。
2)WordTree的构建方法。
构建好的WordTree有9418个节点(对象类型),包括ImageNet的Top 9000个对象,COCO对象,以及ImageNet对象检测挑战数据集中的对象,以及为了添加这些对象,从WordNet路径中提取出的中间对象。
构建WordTree的步骤是:①检查每一个将用于训练和测试的ImageNet和COCO对象,在WordNet中找到对应的节点,如果该节点到WordTree根节点(physical object)的路径只有一条(大部分对象都只有一条路径),就将该路径添加到WrodTree。②经过上面操作后,剩下的是存在多条路径的对象。对每个对象,检查其额外路径长度(将其添加到已有的WordTree中所需的路径长度),选择最短的路径添加到WordTree。这样就构造好了整个WordTree。
3)WordTree如何表达对象的类别
之前对象互斥的情况下,用一个n维向量(n是预测对象的类别数)就可以表达一个对象(预测对象的那一维数值接近1,其它维数值接近0)。现在变成WordTree,如何表达一个对象呢?如果也是n维向量(这里WordTree有9418个节点(对象),即9418维向量),使预测的对象那一位为1,其它维都为0,这样的形式依然是互斥关系,这样是不合理的。合理的向量应该能够体现对象之间的蕴含关系。
比如一个样本图像,其标签是是"dog",那么显然dog节点的概率应该是1,然后,dog属于mammal,自然mammal的概率也是1,......一直沿路径向上到根节点physical object,所有经过的节点其概率都是1。参考上面图10,红色框内的节点概率都是1,其它节点概率为0。另一个样本假如标签是"Norfolk terrier",则从"Norfolk terrier"直到根节点的所有节点概率为1(图10中黄色框内的节点),其它节点概率为0。
所以,一个WordTree对应且仅对应一个对象,不过该对象节点到根节点的所有节点概率都是1,体现出对象之间的蕴含关系,而其它节点概率是0。
4)预测时如何确定一个WordTree所对应的对象
上面讲到训练时,有标签的样本对应的WordTree中,该对象节点到根节点的所有节点概率都是1,其它节点概率是0。那么用于预测时,如何根据WordTree各节点的概率值来确定其对应的对象呢?
根据训练标签的设置,其实模型学习的是各节点的条件概率。比如我们看WordTree(图10)中的一小段。假设一个样本标签是dog,那么dog=1,父节点mammal=1,同级节点cat=0,即P(dog|mammal)=1,P(cat|mammal)=0。
既然各节点预测的是条件概率,那么一个节点的绝对概率就是它到根节点路径上所有条件概率的乘积。比如
P(Norfolk terrier) = P(Norfolk terrier|terrier) * P(terrier|hunting dog) * P(hunting dog|dog) *......* P(animal|physical object) * P(physical object)
对于分类的计算,P(physical object) = 1。
不过,为了计算简便,实际中并不计算出所有节点的绝对概率。而是采用一种比较贪婪的算法。从根节点开始向下遍历,对每一个节点,在它的所有子节点中,选择概率最大的那个(一个节点下面的所有子节点是互斥的),一直向下遍历直到某个节点的子节点概率低于设定的阈值(意味着很难确定它的下一层对象到底是哪个),或达到叶子节点,那么该节点就是该WordTree对应的对象。
5)分类和检测联合训练
由于ImageNet样本比COCO多得多,所以对COCO样本会多做一些采样(oversampling),适当平衡一下样本数量,使两者样本数量比为4:1。
YOLO9000依然采用YOLO2的网络结构,不过5个先验框减少到3个先验框,以减少计算量。YOLO2的输出是13*13*5*(4+1+20),现在YOLO9000的输出是13*13*3*(4+1+9418)。假设输入是416*416*3。
由于对象分类改成WordTree的形式,相应的误差计算也需要一些调整。对一个检测样本,其分类误差只包含该标签节点以及到根节点的所有节点的误差。比如一个样本的标签是dog,那么dog往上标签都是1,但dog往下就不好设置了。因为这个dog其实必然也是某种具体的dog,假设它是一个Norfolk terrier,那么最符合实际的设置是从Norfolk terrier到根节点的标签都是1。但是因为样本没有告诉我们这是一个Norfolk terrier,只是说一个dog,那么从dog以下的标签就没法确定了。
对于分类样本,则只计算分类误差。YOLO9000总共会输出13*13*3=507个预测框(预测对象),计算它们对样本标签的预测概率,选择概率最大的那个框负责预测该样本的对象,即计算其WrodTree的误差。
另外论文中还有一句话,"We also assume that the predicted box overlaps what would be the ground truth label by at least .3 IOU and we backpropagate objectness loss based on this assumption."。感觉意思是其它那些边框,选择其中预测置信度>0.3的边框,作为分类的负样本(objectness)。即这些边框不应该有那么高的置信度来预测该样本对象。具体的就要看下代码了。
小结
总的来说,YOLO2通过一些改进明显提升了预测准确性,同时继续保持其运行速度快的优势。YOLO9000则开创性的提出联合使用分类样本和检测样本的训练方法,使对象检测能够扩展到缺乏检测样本的对象。
最后,如果你竟然坚持看到这里,觉得还有所帮助的话,请点个赞:)๑ ๑
参考
[1]YOLO9000: Better, Faster, Stronger
[4]YOLO9000: Better, Faster, Stronger
[5]WordNet
[6]YOLO v1深入理解
<机器爱学习>YOLO v3深入理解
YOLOv3没有太多的创新,主要是借鉴一些好的方案融合到YOLO里面。不过效果还是不错的,在保持速度优势的前提下,提升了预测精度,尤其是加强了对小物体的识别能力。
本文主要讲v3的改进,由于是以v1和v2为基础,关于YOLO1和YOLO2的部分析请移步YOLO v1深入理解 和 YOLOv2 / YOLO9000 深入理解。
YOLO3主要的改进有:调整了网络结构;利用多尺度特征进行对象检测;对象分类用Logistic取代了softmax。
新的网络结构Darknet-53
在基本的图像特征提取方面,YOLO3采用了称之为Darknet-53的网络结构(含有53个卷积层),它借鉴了残差网络residual network的做法,在一些层之间设置了快捷链路(shortcut connections)。
 图1 Darknet-53[1]
图1 Darknet-53[1]
上图的Darknet-53网络采用256*256*3作为输入,最左侧那一列的1、2、8等数字表示多少个重复的残差组件。每个残差组件有两个卷积层和一个快捷链路,示意图如下:
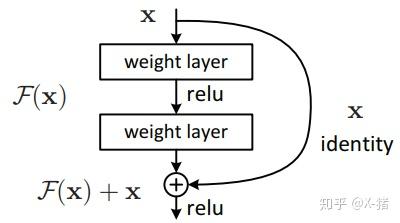 图2 一个残差组件[2]
图2 一个残差组件[2]
利用多尺度特征进行对象检测
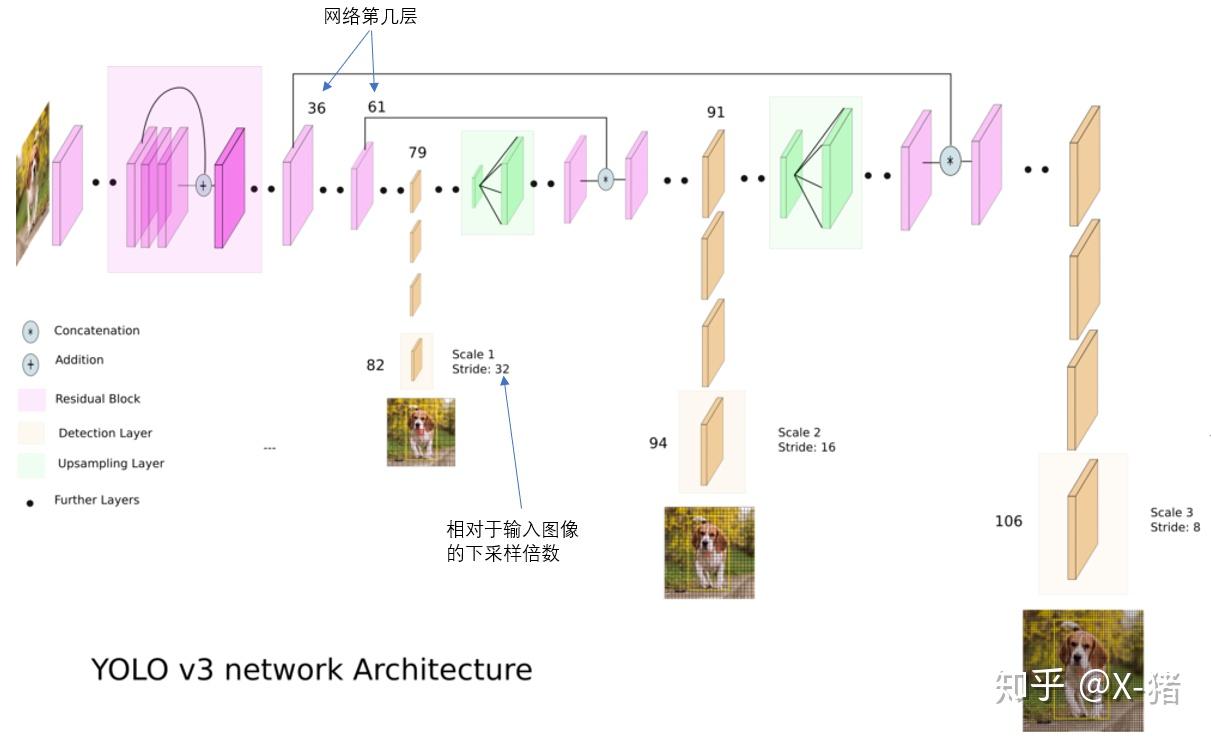 图3 YOLO3网络结构[3]
图3 YOLO3网络结构[3]
YOLO2曾采用passthrough结构来检测细粒度特征,在YOLO3更进一步采用了3个不同尺度的特征图来进行对象检测。
结合上图看,卷积网络在79层后,经过下方几个黄色的卷积层得到一种尺度的检测结果。相比输入图像,这里用于检测的特征图有32倍的下采样。比如输入是416*416的话,这里的特征图就是13*13了。由于下采样倍数高,这里特征图的感受野比较大,因此适合检测图像中尺寸比较大的对象。
为了实现细粒度的检测,第79层的特征图又开始作上采样(从79层往右开始上采样卷积),然后与第61层特征图融合(Concatenation),这样得到第91层较细粒度的特征图,同样经过几个卷积层后得到相对输入图像16倍下采样的特征图。它具有中等尺度的感受野,适合检测中等尺度的对象。
最后,第91层特征图再次上采样,并与第36层特征图融合(Concatenation),最后得到相对输入图像8倍下采样的特征图。它的感受野最小,适合检测小尺寸的对象。
9种尺度的先验框
随着输出的特征图的数量和尺度的变化,先验框的尺寸也需要相应的调整。YOLO2已经开始采用K-means聚类得到先验框的尺寸,YOLO3延续了这种方法,为每种下采样尺度设定3种先验框,总共聚类出9种尺寸的先验框。在COCO数据集这9个先验框是:(10x13),(16x30),(33x23),(30x61),(62x45),(59x119),(116x90),(156x198),(373x326)。
分配上,在最小的13*13特征图上(有最大的感受野)应用较大的先验框(116x90),(156x198),(373x326),适合检测较大的对象。中等的26*26特征图上(中等感受野)应用中等的先验框(30x61),(62x45),(59x119),适合检测中等大小的对象。较大的52*52特征图上(较小的感受野)应用较小的先验框(10x13),(16x30),(33x23),适合检测较小的对象。
 图4 特征图与先验框
图4 特征图与先验框
感受一下9种先验框的尺寸,下图中蓝色框为聚类得到的先验框。黄色框式ground truth,红框是对象中心点所在的网格。
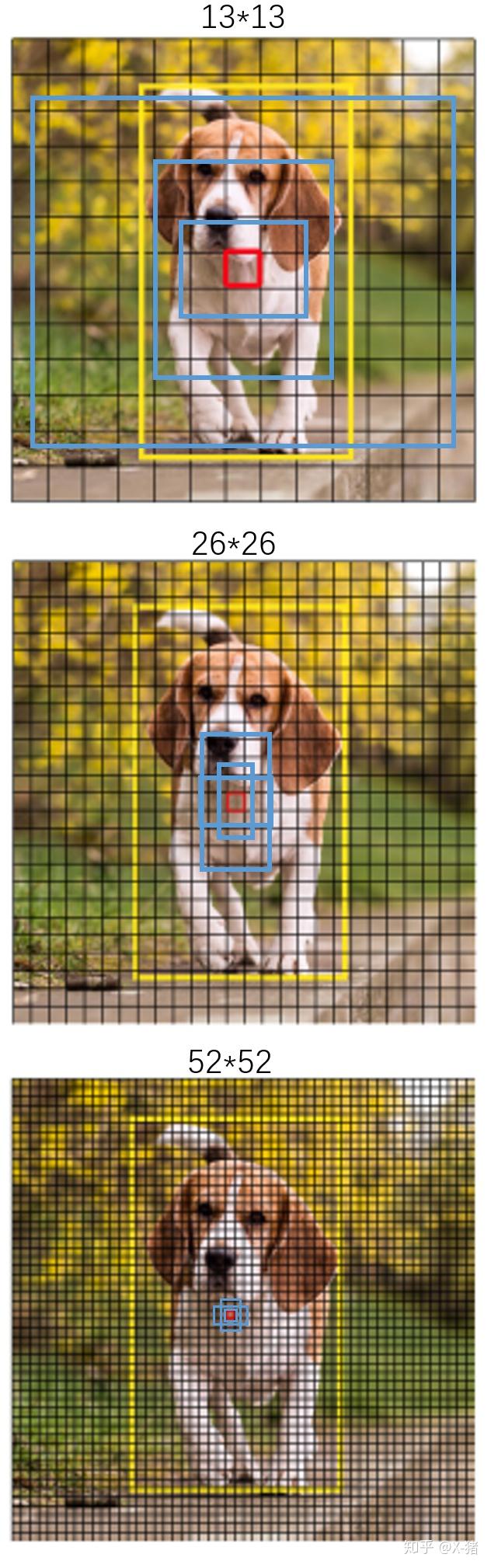 图5 9种先验框尺寸
图5 9种先验框尺寸
对象分类softmax改成logistic
预测对象类别时不使用softmax,改成使用logistic的输出进行预测。这样能够支持多标签对象(比如一个人有Woman 和 Person两个标签)。
输入映射到输出
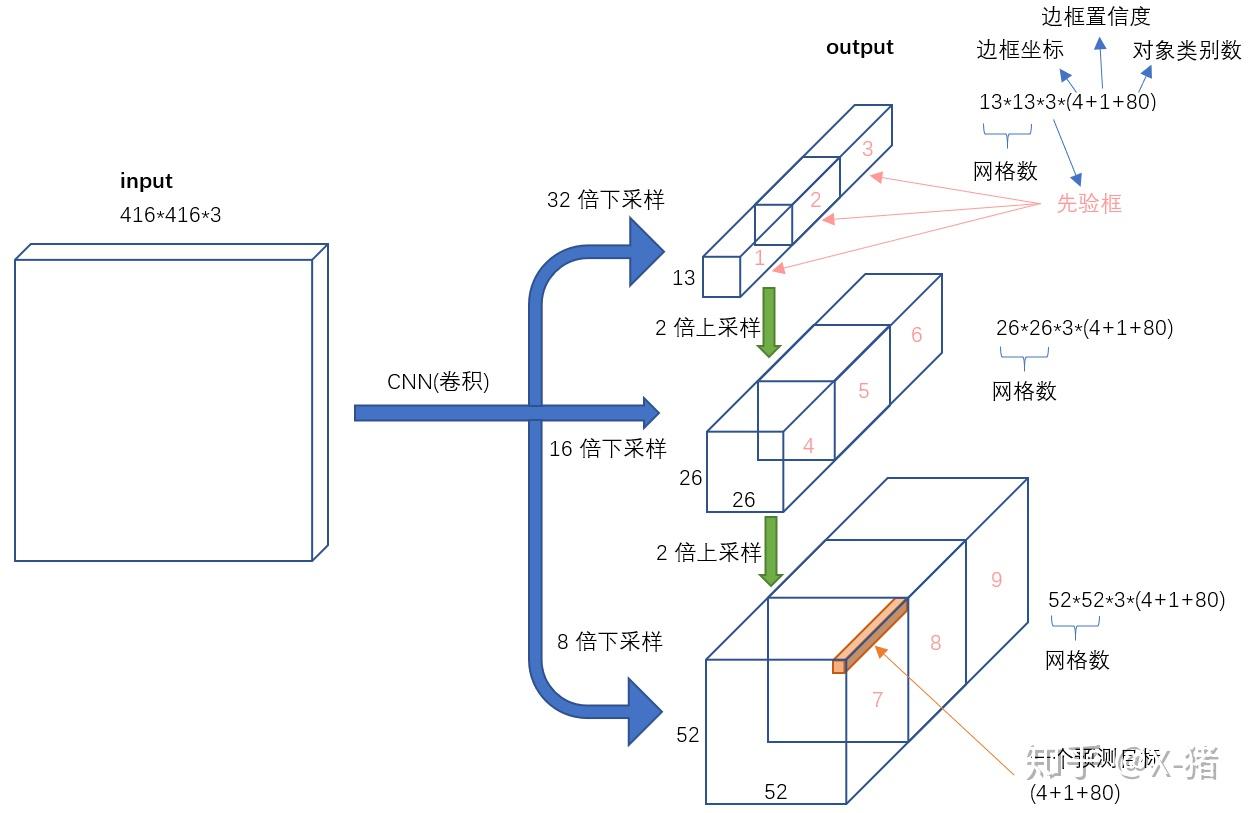 图6 输入 - 输出
图6 输入 - 输出
不考虑神经网络结构细节的话,总的来说,对于一个输入图像,YOLO3将其映射到3个尺度的输出张量,代表图像各个位置存在各种对象的概率。
我们看一下YOLO3共进行了多少个预测。对于一个416*416的输入图像,在每个尺度的特征图的每个网格设置3个先验框,总共有 13*13*3 + 26*26*3 + 52*52*3 = 10647 个预测。每一个预测是一个(4+1+80)=85维向量,这个85维向量包含边框坐标(4个数值),边框置信度(1个数值),对象类别的概率(对于COCO数据集,有80种对象)。
对比一下,YOLO2采用13*13*5 = 845个预测,YOLO3的尝试预测边框数量增加了10多倍,而且是在不同分辨率上进行,所以mAP以及对小物体的检测效果有一定的提升。
小结
YOLO3借鉴了残差网络结构,形成更深的网络层次,以及多尺度检测,提升了mAP及小物体检测效果。如果采用COCO mAP50做评估指标(不是太介意预测框的准确性的话),YOLO3的表现相当惊人,如下图所示,在精确度相当的情况下,YOLOv3的速度是其它模型的3、4倍。
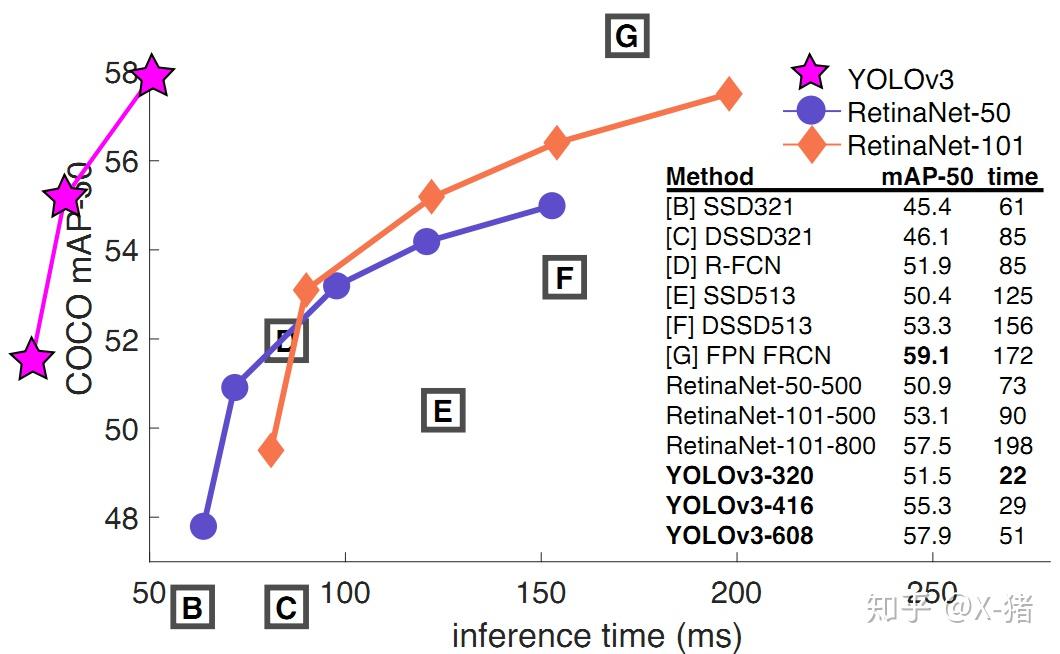 图7 YOLOv3与其它模型的性能对比[1]
图7 YOLOv3与其它模型的性能对比[1]
不过如果要求更精准的预测边框,采用COCO AP做评估标准的话,YOLO3在精确率上的表现就弱了一些。如下图所示。
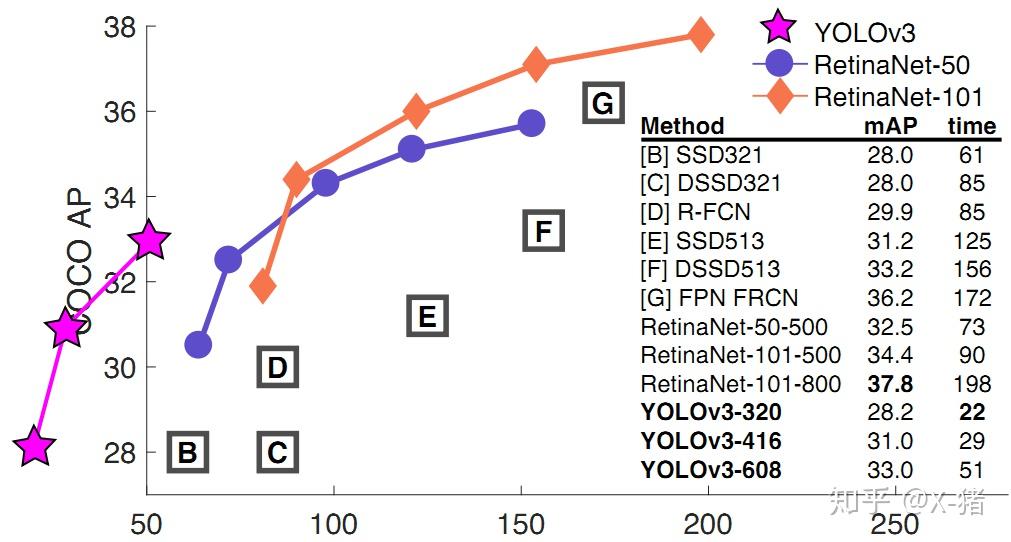 图8 YOLOv3与其它模型的性能对比[1]
图8 YOLOv3与其它模型的性能对比[1]
参考
[1]YOLOv3: An Incremental Improvement
[2]Deep Residual Learning for Image Recognition
[4]How to implement a YOLO (v3) object detector from scratch in PyTorch
目标检测|YOLOv2原理与实现(附YOLOv3)
码字不易,欢迎给个赞!
欢迎交流与转载,文章会同步发布在公众号:机器学习算法全栈工程师(Jeemy110)
前期文章:
小白将:目标检测|YOLO原理与实现zhuanlan.zhihu.com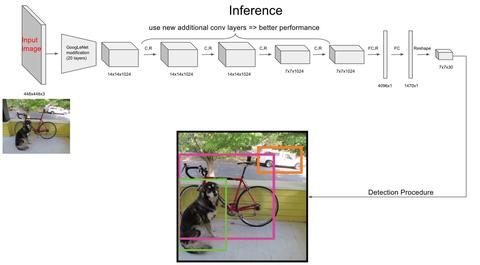 小白将:目标检测|SSD原理与实现zhuanlan.zhihu.com
小白将:目标检测|SSD原理与实现zhuanlan.zhihu.com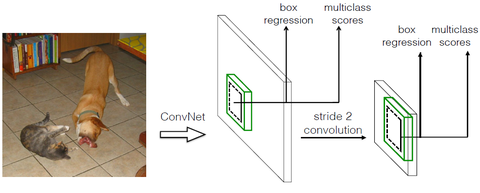 小白将:综述|基于深度学习的目标检测(一)zhuanlan.zhihu.com
小白将:综述|基于深度学习的目标检测(一)zhuanlan.zhihu.com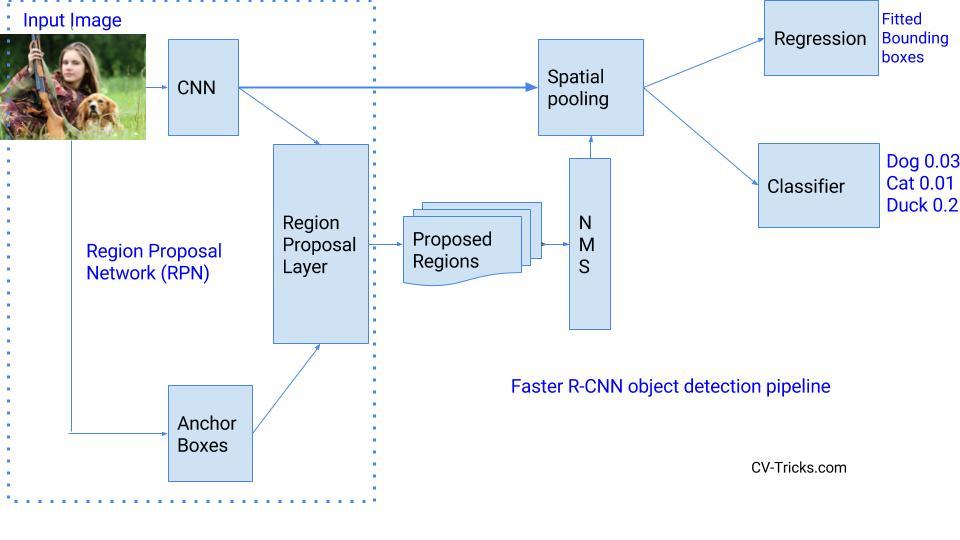
前言
在前面的一篇文章中,我们详细介绍了YOLOv1的原理以及实现过程。这篇文章接着介绍YOLOv2的原理以及实现,YOLOv2的论文全名为YOLO9000: Better, Faster, Stronger,它斩获了CVPR 2017 Best Paper Honorable Mention。在这篇文章中,作者首先在YOLOv1的基础上提出了改进的YOLOv2,然后提出了一种检测与分类联合训练方法,使用这种联合训练方法在COCO检测数据集和ImageNet分类数据集上训练出了YOLO9000模型,其可以检测超过9000多类物体。所以,这篇文章其实包含两个模型:YOLOv2和YOLO9000,不过后者是在前者基础上提出的,两者模型主体结构是一致的。YOLOv2相比YOLOv1做了很多方面的改进,这也使得YOLOv2的mAP有显著的提升,并且YOLOv2的速度依然很快,保持着自己作为one-stage方法的优势,YOLOv2和Faster R-CNN, SSD等模型的对比如图1所示。这里将首先介绍YOLOv2的改进策略,并给出YOLOv2的TensorFlow实现过程,然后介绍YOLO9000的训练方法。近期,YOLOv3也放出来了,YOLOv3也在YOLOv2的基础上做了一部分改进,我们在最后也会简单谈谈YOLOv3所做的改进工作。
 图1:YOLOv2与其它模型在VOC 2007数据集上的效果对比
图1:YOLOv2与其它模型在VOC 2007数据集上的效果对比
YOLOv2的改进策略
YOLOv1虽然检测速度很快,但是在检测精度上却不如R-CNN系检测方法,YOLOv1在物体定位方面(localization)不够准确,并且召回率(recall)较低。YOLOv2共提出了几种改进策略来提升YOLO模型的定位准确度和召回率,从而提高mAP,YOLOv2在改进中遵循一个原则:保持检测速度,这也是YOLO模型的一大优势。YOLOv2的改进策略如图2所示,可以看出,大部分的改进方法都可以比较显著提升模型的mAP。下面详细介绍各个改进策略。
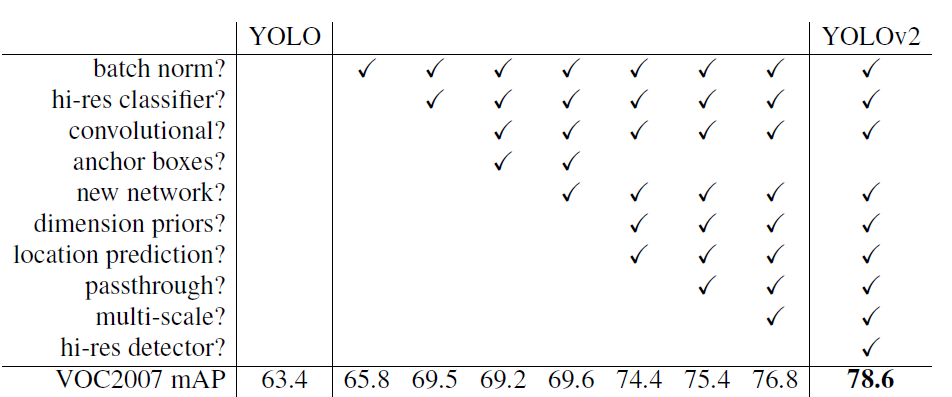 图2:YOLOv2相比YOLOv1的改进策略
图2:YOLOv2相比YOLOv1的改进策略
Batch Normalization
Batch Normalization可以提升模型收敛速度,而且可以起到一定正则化效果,降低模型的过拟合。在YOLOv2中,每个卷积层后面都添加了Batch Normalization层,并且不再使用droput。使用Batch Normalization后,YOLOv2的mAP提升了2.4%。
High Resolution Classifier
目前大部分的检测模型都会在先在ImageNet分类数据集上预训练模型的主体部分(CNN特征提取器),由于历史原因,ImageNet分类模型基本采用大小为 的图片作为输入,分辨率相对较低,不利于检测模型。所以YOLOv1在采用
分类模型预训练后,将分辨率增加至
,并使用这个高分辨率在检测数据集上finetune。但是直接切换分辨率,检测模型可能难以快速适应高分辨率。所以YOLOv2增加了在ImageNet数据集上使用
输入来finetune分类网络这一中间过程(10 epochs),这可以使得模型在检测数据集上finetune之前已经适用高分辨率输入。使用高分辨率分类器后,YOLOv2的mAP提升了约4%。
Convolutional With Anchor Boxes
在YOLOv1中,输入图片最终被划分为 网格,每个单元格预测2个边界框。YOLOv1最后采用的是全连接层直接对边界框进行预测,其中边界框的宽与高是相对整张图片大小的,而由于各个图片中存在不同尺度和长宽比(scales and ratios)的物体,YOLOv1在训练过程中学习适应不同物体的形状是比较困难的,这也导致YOLOv1在精确定位方面表现较差。YOLOv2借鉴了Faster R-CNN中RPN网络的先验框(anchor boxes,prior boxes,SSD也采用了先验框)策略。RPN对CNN特征提取器得到的特征图(feature map)进行卷积来预测每个位置的边界框以及置信度(是否含有物体),并且各个位置设置不同尺度和比例的先验框,所以RPN预测的是边界框相对于先验框的offsets值(其实是transform值,详细见Faster R_CNN论文),采用先验框使得模型更容易学习。所以YOLOv2移除了YOLOv1中的全连接层而采用了卷积和anchor boxes来预测边界框。为了使检测所用的特征图分辨率更高,移除其中的一个pool层。在检测模型中,YOLOv2不是采用
图片作为输入,而是采用
大小。因为YOLOv2模型下采样的总步长为
,对于
大小的图片,最终得到的特征图大小为
,维度是奇数,这样特征图恰好只有一个中心位置。对于一些大物体,它们中心点往往落入图片中心位置,此时使用特征图的一个中心点去预测这些物体的边界框相对容易些。所以在YOLOv2设计中要保证最终的特征图有奇数个位置。对于YOLOv1,每个cell都预测2个boxes,每个boxes包含5个值:
,前4个值是边界框位置与大小,最后一个值是置信度(confidence scores,包含两部分:含有物体的概率以及预测框与ground truth的IOU)。但是每个cell只预测一套分类概率值(class predictions,其实是置信度下的条件概率值),供2个boxes共享。YOLOv2使用了anchor boxes之后,每个位置的各个anchor box都单独预测一套分类概率值,这和SSD比较类似(但SSD没有预测置信度,而是把background作为一个类别来处理)。
使用anchor boxes之后,YOLOv2的mAP有稍微下降(这里下降的原因,我猜想是YOLOv2虽然使用了anchor boxes,但是依然采用YOLOv1的训练方法)。YOLOv1只能预测98个边界框( ),而YOLOv2使用anchor boxes之后可以预测上千个边界框(
)。所以使用anchor boxes之后,YOLOv2的召回率大大提升,由原来的81%升至88%。
Dimension Clusters
在Faster R-CNN和SSD中,先验框的维度(长和宽)都是手动设定的,带有一定的主观性。如果选取的先验框维度比较合适,那么模型更容易学习,从而做出更好的预测。因此,YOLOv2采用k-means聚类方法对训练集中的边界框做了聚类分析。因为设置先验框的主要目的是为了使得预测框与ground truth的IOU更好,所以聚类分析时选用box与聚类中心box之间的IOU值作为距离指标:
图3为在VOC和COCO数据集上的聚类分析结果,随着聚类中心数目的增加,平均IOU值(各个边界框与聚类中心的IOU的平均值)是增加的,但是综合考虑模型复杂度和召回率,作者最终选取5个聚类中心作为先验框,其相对于图片的大小如右边图所示。对于两个数据集,5个先验框的width和height如下所示(来源:YOLO源码的cfg文件):
COCO: (0.57273, 0.677385), (1.87446, 2.06253), (3.33843, 5.47434), (7.88282, 3.52778), (9.77052, 9.16828)
VOC: (1.3221, 1.73145), (3.19275, 4.00944), (5.05587, 8.09892), (9.47112, 4.84053), (11.2364, 10.0071)
但是这里先验框的大小具体指什么作者并没有说明,但肯定不是像素点,从代码实现上看,应该是相对于预测的特征图大小( )。对比两个数据集,也可以看到COCO数据集上的物体相对小点。这个策略作者并没有单独做实验,但是作者对比了采用聚类分析得到的先验框与手动设置的先验框在平均IOU上的差异,发现前者的平均IOU值更高,因此模型更容易训练学习。
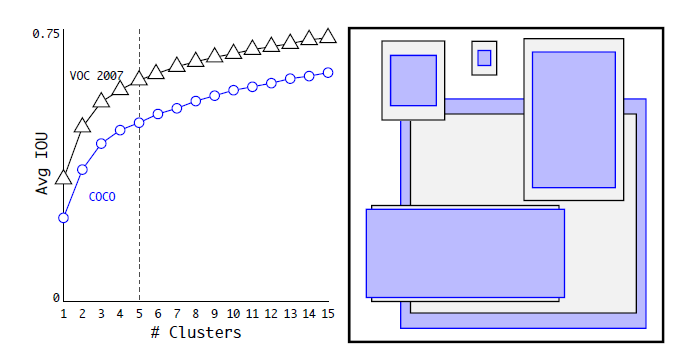 图3:数据集VOC和COCO上的边界框聚类分析结果
图3:数据集VOC和COCO上的边界框聚类分析结果
New Network: Darknet-19
YOLOv2采用了一个新的基础模型(特征提取器),称为Darknet-19,包括19个卷积层和5个maxpooling层,如图4所示。Darknet-19与VGG16模型设计原则是一致的,主要采用 卷积,采用
的maxpooling层之后,特征图维度降低2倍,而同时将特征图的channles增加两倍。与NIN(Network in Network)类似,Darknet-19最终采用global avgpooling做预测,并且在
卷积之间使用
卷积来压缩特征图channles以降低模型计算量和参数。Darknet-19每个卷积层后面同样使用了batch norm层以加快收敛速度,降低模型过拟合。在ImageNet分类数据集上,Darknet-19的top-1准确度为72.9%,top-5准确度为91.2%,但是模型参数相对小一些。使用Darknet-19之后,YOLOv2的mAP值没有显著提升,但是计算量却可以减少约33%。
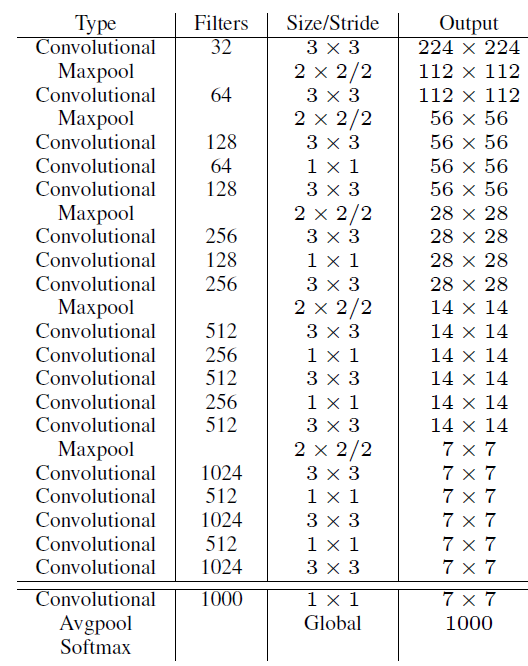 图4:Darknet-19模型结构
图4:Darknet-19模型结构
Direct location prediction
前面讲到,YOLOv2借鉴RPN网络使用anchor boxes来预测边界框相对先验框的offsets。边界框的实际中心位置 ,需要根据预测的坐标偏移值
,先验框的尺度
以及中心坐标
(特征图每个位置的中心点)来计算:
但是上面的公式是无约束的,预测的边界框很容易向任何方向偏移,如当 时边界框将向右偏移先验框的一个宽度大小,而当
时边界框将向左偏移先验框的一个宽度大小,因此每个位置预测的边界框可以落在图片任何位置,这导致模型的不稳定性,在训练时需要很长时间来预测出正确的offsets。所以,YOLOv2弃用了这种预测方式,而是沿用YOLOv1的方法,就是预测边界框中心点相对于对应cell左上角位置的相对偏移值,为了将边界框中心点约束在当前cell中,使用sigmoid函数处理偏移值,这样预测的偏移值在(0,1)范围内(每个cell的尺度看做1)。总结来看,根据边界框预测的4个offsets
,可以按如下公式计算出边界框实际位置和大小:
其中 为cell的左上角坐标,如图5所示,在计算时每个cell的尺度为1,所以当前cell的左上角坐标为
。由于sigmoid函数的处理,边界框的中心位置会约束在当前cell内部,防止偏移过多。而
和
是先验框的宽度与长度,前面说过它们的值也是相对于特征图大小的,在特征图中每个cell的长和宽均为1。这里记特征图的大小为
(在文中是
),这样我们可以将边界框相对于整张图片的位置和大小计算出来(4个值均在0和1之间):
如果再将上面的4个值分别乘以图片的宽度和长度(像素点值)就可以得到边界框的最终位置和大小了。这就是YOLOv2边界框的整个解码过程。约束了边界框的位置预测值使得模型更容易稳定训练,结合聚类分析得到先验框与这种预测方法,YOLOv2的mAP值提升了约5%。
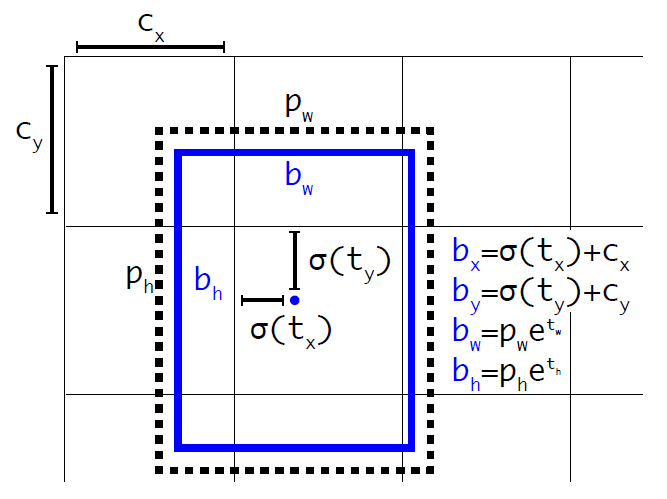 图5:边界框位置与大小的计算示例图
图5:边界框位置与大小的计算示例图
Fine-Grained Features
YOLOv2的输入图片大小为 ,经过5次maxpooling之后得到
大小的特征图,并以此特征图采用卷积做预测。
大小的特征图对检测大物体是足够了,但是对于小物体还需要更精细的特征图(Fine-Grained Features)。因此SSD使用了多尺度的特征图来分别检测不同大小的物体,前面更精细的特征图可以用来预测小物体。YOLOv2提出了一种passthrough层来利用更精细的特征图。YOLOv2所利用的Fine-Grained Features是
大小的特征图(最后一个maxpooling层的输入),对于Darknet-19模型来说就是大小为
的特征图。passthrough层与ResNet网络的shortcut类似,以前面更高分辨率的特征图为输入,然后将其连接到后面的低分辨率特征图上。前面的特征图维度是后面的特征图的2倍,passthrough层抽取前面层的每个
的局部区域,然后将其转化为channel维度,对于
的特征图,经passthrough层处理之后就变成了
的新特征图(特征图大小降低4倍,而channles增加4倍,图6为一个实例),这样就可以与后面的
特征图连接在一起形成
大小的特征图,然后在此特征图基础上卷积做预测。在YOLO的C源码中,passthrough层称为reorg layer。在TensorFlow中,可以使用tf.extract_image_patches或者tf.space_to_depth来实现passthrough层:
out = tf.extract_image_patches(in, [1, stride, stride, 1], [1, stride, stride, 1], [1,1,1,1], padding="VALID")
// or use tf.space_to_depth
out = tf.space_to_depth(in, 2)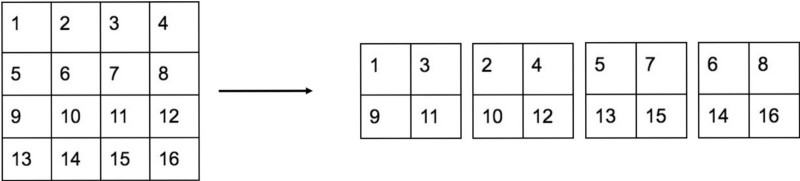 图6:passthrough层实例
图6:passthrough层实例
另外,作者在后期的实现中借鉴了ResNet网络,不是直接对高分辨特征图处理,而是增加了一个中间卷积层,先采用64个 卷积核进行卷积,然后再进行passthrough处理,这样
的特征图得到
的特征图。这算是实现上的一个小细节。使用Fine-Grained Features之后YOLOv2的性能有1%的提升。
Multi-Scale Training
由于YOLOv2模型中只有卷积层和池化层,所以YOLOv2的输入可以不限于 大小的图片。为了增强模型的鲁棒性,YOLOv2采用了多尺度输入训练策略,具体来说就是在训练过程中每间隔一定的iterations之后改变模型的输入图片大小。由于YOLOv2的下采样总步长为32,输入图片大小选择一系列为32倍数的值:
,输入图片最小为
,此时对应的特征图大小为
(不是奇数了,确实有点尴尬),而输入图片最大为
,对应的特征图大小为
。在训练过程,每隔10个iterations随机选择一种输入图片大小,然后只需要修改对最后检测层的处理就可以重新训练。
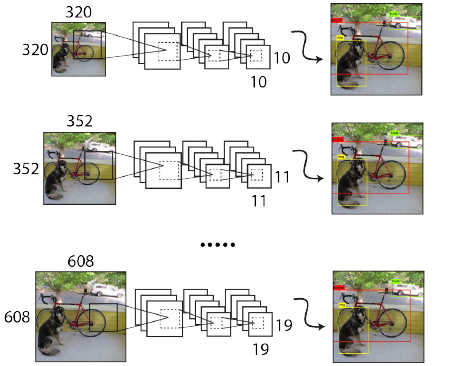 图7:Multi-Scale Training
图7:Multi-Scale Training
采用Multi-Scale Training策略,YOLOv2可以适应不同大小的图片,并且预测出很好的结果。在测试时,YOLOv2可以采用不同大小的图片作为输入,在VOC 2007数据集上的效果如下图所示。可以看到采用较小分辨率时,YOLOv2的mAP值略低,但是速度更快,而采用高分辨输入时,mAP值更高,但是速度略有下降,对于 ,mAP高达78.6%。注意,这只是测试时输入图片大小不同,而实际上用的是同一个模型(采用Multi-Scale Training训练)。
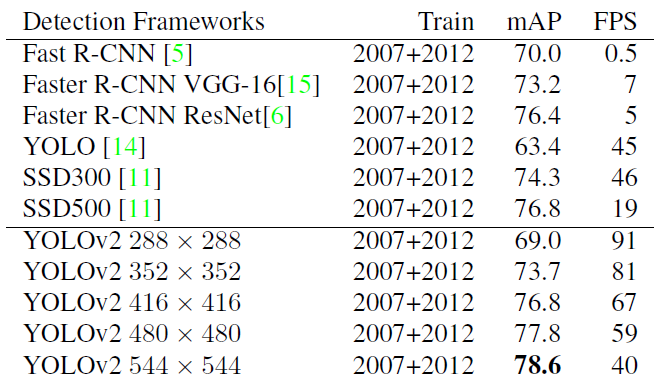 图8:YOLOv2在VOC 2007数据集上的性能对比
图8:YOLOv2在VOC 2007数据集上的性能对比
总结来看,虽然YOLOv2做了很多改进,但是大部分都是借鉴其它论文的一些技巧,如Faster R-CNN的anchor boxes,YOLOv2采用anchor boxes和卷积做预测,这基本上与SSD模型(单尺度特征图的SSD)非常类似了,而且SSD也是借鉴了Faster R-CNN的RPN网络。从某种意义上来说,YOLOv2和SSD这两个one-stage模型与RPN网络本质上无异,只不过RPN不做类别的预测,只是简单地区分物体与背景。在two-stage方法中,RPN起到的作用是给出region proposals,其实就是作出粗糙的检测,所以另外增加了一个stage,即采用R-CNN网络来进一步提升检测的准确度(包括给出类别预测)。而对于one-stage方法,它们想要一步到位,直接采用“RPN”网络作出精确的预测,要因此要在网络设计上做很多的tricks。YOLOv2的一大创新是采用Multi-Scale Training策略,这样同一个模型其实就可以适应多种大小的图片了。
YOLOv2的训练
YOLOv2的训练主要包括三个阶段。第一阶段就是先在ImageNet分类数据集上预训练Darknet-19,此时模型输入为 ,共训练160个epochs。然后第二阶段将网络的输入调整为
,继续在ImageNet数据集上finetune分类模型,训练10个epochs,此时分类模型的top-1准确度为76.5%,而top-5准确度为93.3%。第三个阶段就是修改Darknet-19分类模型为检测模型,并在检测数据集上继续finetune网络。网络修改包括(网路结构可视化):移除最后一个卷积层、global avgpooling层以及softmax层,并且新增了三个
卷积层,同时增加了一个passthrough层,最后使用
卷积层输出预测结果,输出的channels数为:
,和训练采用的数据集有关系。由于anchors数为5,对于VOC数据集输出的channels数就是125,而对于COCO数据集则为425。这里以VOC数据集为例,最终的预测矩阵为
(shape为
),可以先将其reshape为
,其中
为边界框的位置和大小
,
为边界框的置信度,而
为类别预测值。
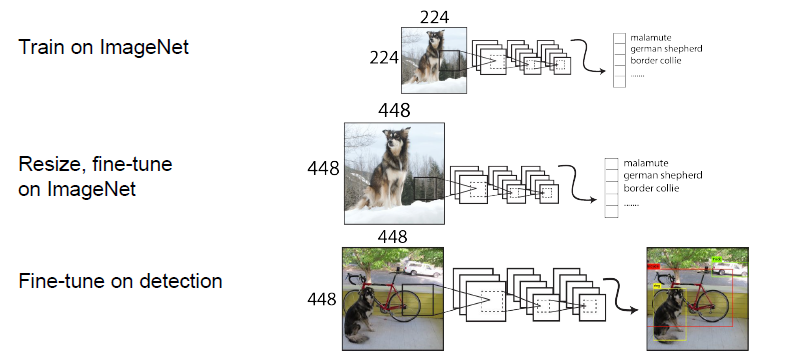 图9:YOLOv2训练的三个阶段
图9:YOLOv2训练的三个阶段 图10:YOLOv2结构示意图
图10:YOLOv2结构示意图
YOLOv2的网络结构以及训练参数我们都知道了,但是貌似少了点东西。仔细一想,原来作者并没有给出YOLOv2的训练过程的两个最重要方面,即先验框匹配(样本选择)以及训练的损失函数,难怪Ng说YOLO论文很难懂,没有这两方面的说明我们确实不知道YOLOv2到底是怎么训练起来的。不过默认按照YOLOv1的处理方式也是可以处理,我看了YOLO在TensorFlow上的实现darkflow(见yolov2/train.py),发现它就是如此处理的:和YOLOv1一样,对于训练图片中的ground truth,若其中心点落在某个cell内,那么该cell内的5个先验框所对应的边界框负责预测它,具体是哪个边界框预测它,需要在训练中确定,即由那个与ground truth的IOU最大的边界框预测它,而剩余的4个边界框不与该ground truth匹配。YOLOv2同样需要假定每个cell至多含有一个grounth truth,而在实际上基本不会出现多于1个的情况。与ground truth匹配的先验框计算坐标误差、置信度误差(此时target为1)以及分类误差,而其它的边界框只计算置信度误差(此时target为0)。YOLOv2和YOLOv1的损失函数一样,为均方差函数。
但是我看了YOLOv2的源码(训练样本处理与loss计算都包含在文件region_layer.c中,YOLO源码没有任何注释,反正我看了是直摇头),并且参考国外的blog以及allanzelener/YAD2K(Ng深度学习教程所参考的那个Keras实现)上的实现,发现YOLOv2的处理比原来的v1版本更加复杂。先给出loss计算公式:
我们来一点点解释,首先 分别指的是特征图(
)的宽与高,而
指的是先验框数目(这里是5),各个
值是各个loss部分的权重系数。第一项loss是计算background的置信度误差,但是哪些预测框来预测背景呢,需要先计算各个预测框和所有ground truth的IOU值,并且取最大值Max_IOU,如果该值小于一定的阈值(YOLOv2使用的是0.6),那么这个预测框就标记为background,需要计算noobj的置信度误差。第二项是计算先验框与预测宽的坐标误差,但是只在前12800个iterations间计算,我觉得这项应该是在训练前期使预测框快速学习到先验框的形状。第三大项计算与某个ground truth匹配的预测框各部分loss值,包括坐标误差、置信度误差以及分类误差。先说一下匹配原则,对于某个ground truth,首先要确定其中心点要落在哪个cell上,然后计算这个cell的5个先验框与ground truth的IOU值(YOLOv2中bias_match=1),计算IOU值时不考虑坐标,只考虑形状,所以先将先验框与ground truth的中心点都偏移到同一位置(原点),然后计算出对应的IOU值,IOU值最大的那个先验框与ground truth匹配,对应的预测框用来预测这个ground truth。在计算obj置信度时,target=1,但与YOLOv1一样而增加了一个控制参数rescore,当其为1时,target取预测框与ground truth的真实IOU值(cfg文件中默认采用这种方式)。对于那些没有与ground truth匹配的先验框(与预测框对应),除去那些Max_IOU低于阈值的,其它的就全部忽略,不计算任何误差。这点在YOLOv3论文中也有相关说明:YOLO中一个ground truth只会与一个先验框匹配(IOU值最好的),对于那些IOU值超过一定阈值的先验框,其预测结果就忽略了。这和SSD与RPN网络的处理方式有很大不同,因为它们可以将一个ground truth分配给多个先验框。尽管YOLOv2和YOLOv1计算loss处理上有不同,但都是采用均方差来计算loss。另外需要注意的一点是,在计算boxes的
和
误差时,YOLOv1中采用的是平方根以降低boxes的大小对误差的影响,而YOLOv2是直接计算,但是根据ground truth的大小对权重系数进行修正:l.coord_scale * (2 - truth.w*truth.h)(这里w和h都归一化到(0,1)),这样对于尺度较小的boxes其权重系数会更大一些,可以放大误差,起到和YOLOv1计算平方根相似的效果(参考YOLO v2 损失函数源码分析)。
// box误差函数,计算梯度
float delta_region_box(box truth, float *x, float *biases, int n, int index, int i, int j, int w, int h, float *delta, float scale, int stride)
{
box pred = get_region_box(x, biases, n, index, i, j, w, h, stride);
float iou = box_iou(pred, truth);
// 计算ground truth的offsets值
float tx = (truth.x*w - i);
float ty = (truth.y*h - j);
float tw = log(truth.w*w / biases[2*n]);
float th = log(truth.h*h / biases[2*n + 1]);
delta[index + 0*stride] = scale * (tx - x[index + 0*stride]);
delta[index + 1*stride] = scale * (ty - x[index + 1*stride]);
delta[index + 2*stride] = scale * (tw - x[index + 2*stride]);
delta[index + 3*stride] = scale * (th - x[index + 3*stride]);
return iou;
}最终的YOLOv2模型在速度上比YOLOv1还快(采用了计算量更少的Darknet-19模型),而且模型的准确度比YOLOv1有显著提升,详情见paper。
YOLOv2在TensorFlow上实现
这里参考YOLOv2在Keras上的复现(见yhcc/yolo2),使用TensorFlow实现YOLOv2在COCO数据集上的test过程。首先是定义YOLOv2的主体网络结构Darknet-19:
def darknet(images, n_last_channels=425):
"""Darknet19 for YOLOv2"""
net = conv2d(images, 32, 3, 1, name="conv1")
net = maxpool(net, name="pool1")
net = conv2d(net, 64, 3, 1, name="conv2")
net = maxpool(net, name="pool2")
net = conv2d(net, 128, 3, 1, name="conv3_1")
net = conv2d(net, 64, 1, name="conv3_2")
net = conv2d(net, 128, 3, 1, name="conv3_3")
net = maxpool(net, name="pool3")
net = conv2d(net, 256, 3, 1, name="conv4_1")
net = conv2d(net, 128, 1, name="conv4_2")
net = conv2d(net, 256, 3, 1, name="conv4_3")
net = maxpool(net, name="pool4")
net = conv2d(net, 512, 3, 1, name="conv5_1")
net = conv2d(net, 256, 1, name="conv5_2")
net = conv2d(net, 512, 3, 1, name="conv5_3")
net = conv2d(net, 256, 1, name="conv5_4")
net = conv2d(net, 512, 3, 1, name="conv5_5")
shortcut = net
net = maxpool(net, name="pool5")
net = conv2d(net, 1024, 3, 1, name="conv6_1")
net = conv2d(net, 512, 1, name="conv6_2")
net = conv2d(net, 1024, 3, 1, name="conv6_3")
net = conv2d(net, 512, 1, name="conv6_4")
net = conv2d(net, 1024, 3, 1, name="conv6_5")
# ---------
net = conv2d(net, 1024, 3, 1, name="conv7_1")
net = conv2d(net, 1024, 3, 1, name="conv7_2")
# shortcut
shortcut = conv2d(shortcut, 64, 1, name="conv_shortcut")
shortcut = reorg(shortcut, 2)
net = tf.concat([shortcut, net], axis=-1)
net = conv2d(net, 1024, 3, 1, name="conv8")
# detection layer
net = conv2d(net, n_last_channels, 1, batch_normalize=0,
activation=None, use_bias=True, name="conv_dec")
return net然后实现对Darknet-19模型输出的解码:
def decode(detection_feat, feat_sizes=(13, 13), num_classes=80,
anchors=None):
"""decode from the detection feature"""
H, W = feat_sizes
num_anchors = len(anchors)
detetion_results = tf.reshape(detection_feat, [-1, H * W, num_anchors,
num_classes + 5])
bbox_xy = tf.nn.sigmoid(detetion_results[:, :, :, 0:2])
bbox_wh = tf.exp(detetion_results[:, :, :, 2:4])
obj_probs = tf.nn.sigmoid(detetion_results[:, :, :, 4])
class_probs = tf.nn.softmax(detetion_results[:, :, :, 5:])
anchors = tf.constant(anchors, dtype=tf.float32)
height_ind = tf.range(H, dtype=tf.float32)
width_ind = tf.range(W, dtype=tf.float32)
x_offset, y_offset = tf.meshgrid(height_ind, width_ind)
x_offset = tf.reshape(x_offset, [1, -1, 1])
y_offset = tf.reshape(y_offset, [1, -1, 1])
# decode
bbox_x = (bbox_xy[:, :, :, 0] + x_offset) / W
bbox_y = (bbox_xy[:, :, :, 1] + y_offset) / H
bbox_w = bbox_wh[:, :, :, 0] * anchors[:, 0] / W * 0.5
bbox_h = bbox_wh[:, :, :, 1] * anchors[:, 1] / H * 0.5
bboxes = tf.stack([bbox_x - bbox_w, bbox_y - bbox_h,
bbox_x + bbox_w, bbox_y + bbox_h], axis=3)
return bboxes, obj_probs, class_probs我将YOLOv2的官方训练权重文件转换了TensorFlow的checkpoint文件(下载链接),具体的测试demo都放在我的GitHub上了,感兴趣的可以去下载测试一下,至于train的实现就自己折腾吧,相对会棘手点。
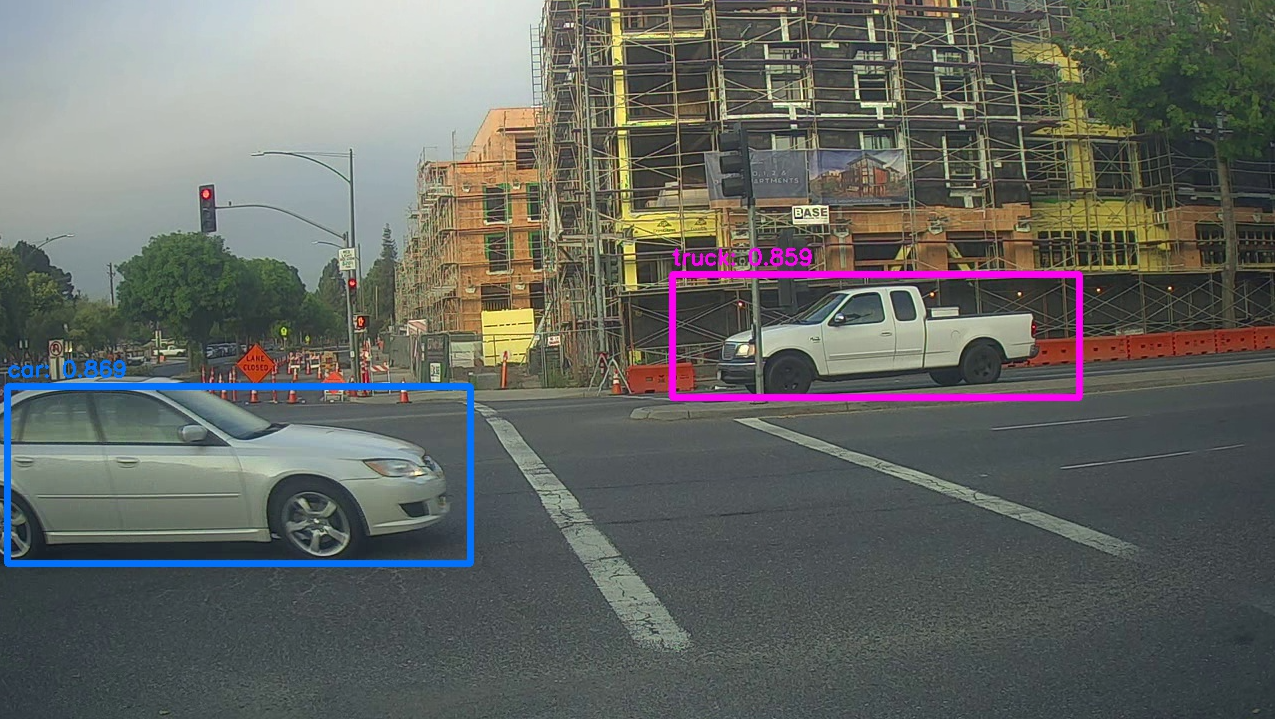 图11:YOLOv2在自然图片上的测试
图11:YOLOv2在自然图片上的测试
YOLO9000
YOLO9000是在YOLOv2的基础上提出的一种可以检测超过9000个类别的模型,其主要贡献点在于提出了一种分类和检测的联合训练策略。众多周知,检测数据集的标注要比分类数据集打标签繁琐的多,所以ImageNet分类数据集比VOC等检测数据集高出几个数量级。在YOLO中,边界框的预测其实并不依赖于物体的标签,所以YOLO可以实现在分类和检测数据集上的联合训练。对于检测数据集,可以用来学习预测物体的边界框、置信度以及为物体分类,而对于分类数据集可以仅用来学习分类,但是其可以大大扩充模型所能检测的物体种类。
作者选择在COCO和ImageNet数据集上进行联合训练,但是遇到的第一问题是两者的类别并不是完全互斥的,比如"Norfolk terrier"明显属于"dog",所以作者提出了一种层级分类方法(Hierarchical classification),主要思路是根据各个类别之间的从属关系(根据WordNet)建立一种树结构WordTree,结合COCO和ImageNet建立的WordTree如下图所示:
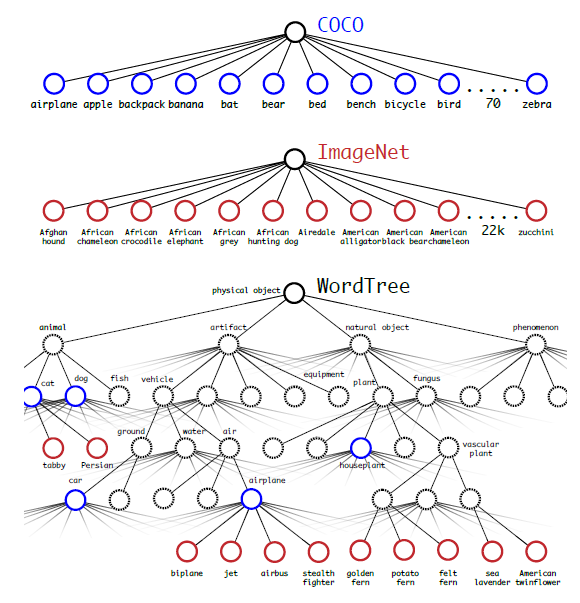 图12:基于COCO和ImageNet数据集建立的WordTree
图12:基于COCO和ImageNet数据集建立的WordTree
WordTree中的根节点为"physical object",每个节点的子节点都属于同一子类,可以对它们进行softmax处理。在给出某个类别的预测概率时,需要找到其所在的位置,遍历这个path,然后计算path上各个节点的概率之积。
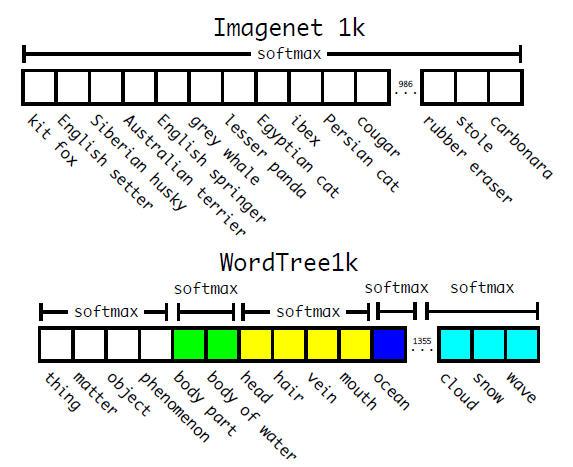 图13:ImageNet与WordTree预测的对比
图13:ImageNet与WordTree预测的对比
在训练时,如果是检测样本,按照YOLOv2的loss计算误差,而对于分类样本,只计算分类误差。在预测时,YOLOv2给出的置信度就是 ,同时会给出边界框位置以及一个树状概率图。在这个概率图中找到概率最高的路径,当达到某一个阈值时停止,就用当前节点表示预测的类别。
通过联合训练策略,YOLO9000可以快速检测出超过9000个类别的物体,总体mAP值为19,7%。我觉得这是作者在这篇论文作出的最大的贡献,因为YOLOv2的改进策略亮点并不是很突出,但是YOLO9000算是开创之举。
YOLOv3
近期,YOLOv3发布了,但是正如作者所说,这仅仅是他们近一年的一个工作报告(TECH REPORT),不算是一个完整的paper,因为他们实际上是把其它论文的一些工作在YOLO上尝试了一下。相比YOLOv2,我觉得YOLOv3最大的变化包括两点:使用残差模型和采用FPN架构。YOLOv3的特征提取器是一个残差模型,因为包含53个卷积层,所以称为Darknet-53,从网络结构上看,相比Darknet-19网络使用了残差单元,所以可以构建得更深。另外一个点是采用FPN架构(Feature Pyramid Networks for Object Detection)来实现多尺度检测。YOLOv3采用了3个尺度的特征图(当输入为 时):
,
,
,VOC数据集上的YOLOv3网络结构如图15所示,其中红色部分为各个尺度特征图的检测结果。YOLOv3每个位置使用3个先验框,所以使用k-means得到9个先验框,并将其划分到3个尺度特征图上,尺度更大的特征图使用更小的先验框,和SSD类似。
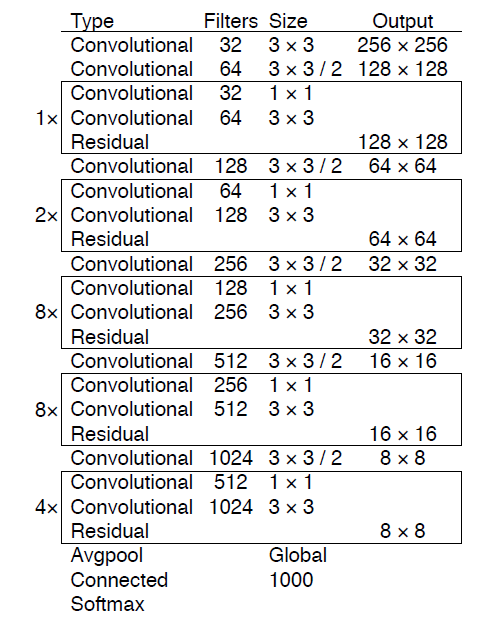 图14:YOLOv3所用的Darknet-53模型
图14:YOLOv3所用的Darknet-53模型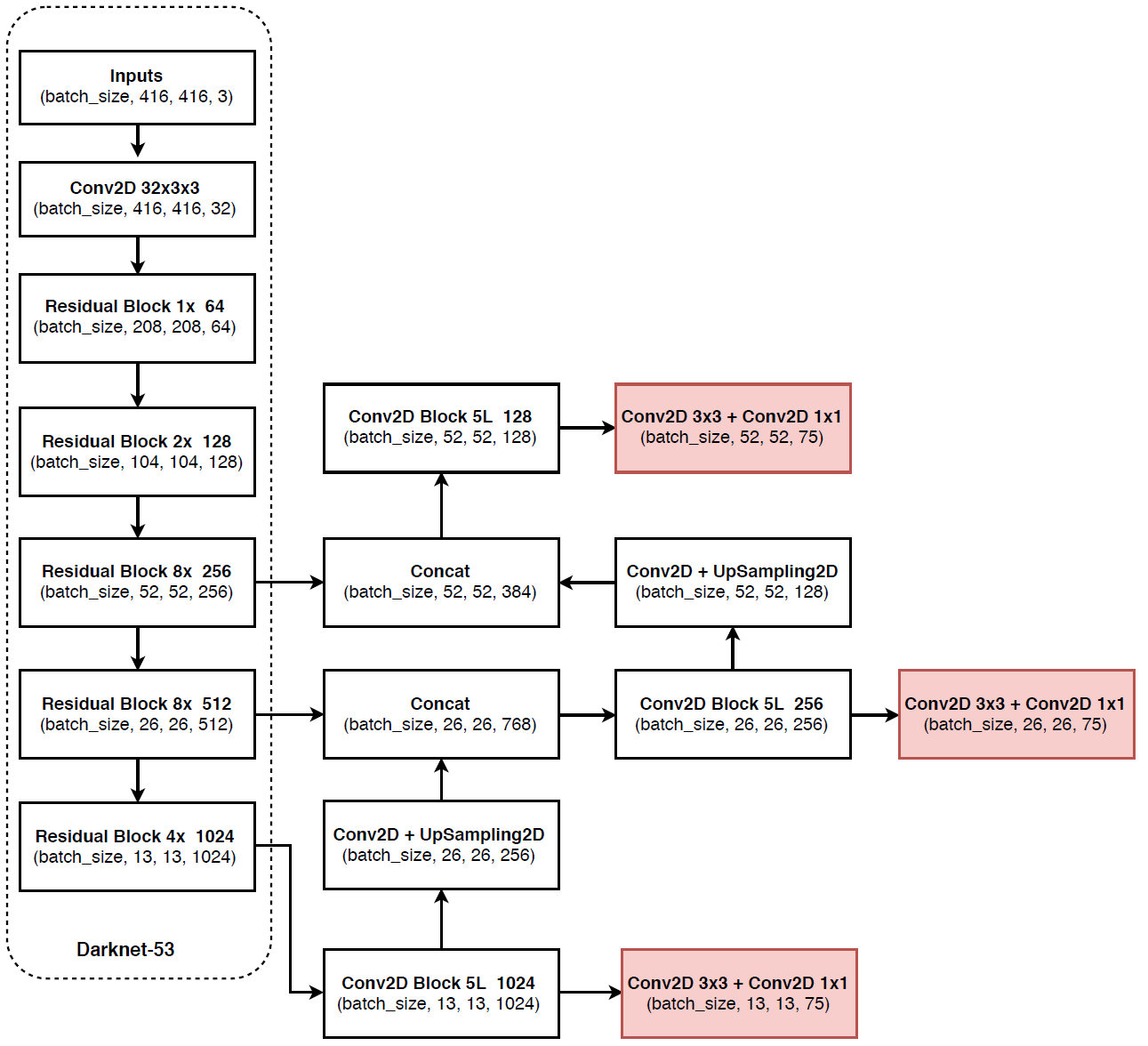 图15 YOLOv3网络结构示意图(VOC数据集)
图15 YOLOv3网络结构示意图(VOC数据集)
YOLOv3与其它检测模型的对比如下图所示,可以看到在速度上YOLOv3完胜其它方法,虽然AP值并不是最好的(如果比较AP-0.5,YOLOv3优势更明显)。
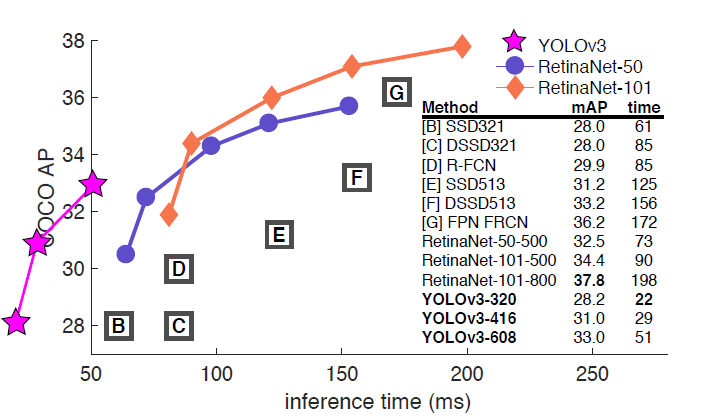 图16:YOLOv3在COCO测试集与其它检测算法对比图
图16:YOLOv3在COCO测试集与其它检测算法对比图
小结
从YOLO的三代变革中可以看到,在目标检测领域比较好的策略包含:设置先验框,采用全卷积做预测,采用残差网络,采用多尺度特征图做预测。期待未来有更好的策略出现。本人水平有限,文中难免出现错误,欢迎指正!
参考
- Darknet官网.
- thtrieu/darkflow.
- You Only Look Once: Unified, Real-Time Object Detection.
- YOLO9000: Better, Faster, Stronger.
- YOLOv3: An Incremental Improvement.
- yhcc/yolo2.
- pytorch-yolo2.
- Training Object Detection (YOLOv2) from scratch using Cyclic Learning Rates.
- allanzelener/YAD2K.
- marvis/pytorch-yolo3.
码字不易,欢迎给个赞!
欢迎交流与转载,文章会同步发布在公众号:机器学习算法全栈工程师(Jeemy110)