【公开课】斯坦福李飞飞教授最新cs231n计算机视觉经典课程
视频选集
- P1【01】1 课程介绍-计算机视觉概述
- P2【02】1.1 课程介绍-历史背景
- P3【03】1.2 课程介绍-课程后勤
- P4【04】2 图像分类-数据驱动方法
- P5【05】2.1 图像分类-K最近邻算法
- P6【06】2.2 图像分类-线性分类1
- P8【08】4 介绍神经网络-反向传播
- P9【09】4.1 介绍神经网络-神经网络
- P10【10】5 卷积神经网络历史
- P11【11】5.1 卷积神经网络-卷积和池化
- P12【12】5.2 卷积神经网络-视觉之外的卷积神经网络
- P13【13】6 训练神经网络(上)-激活函数
- P14【14】6.1 训练神经网络(上)-批量归一化
- P15【15】7 训练神经网络(下)-更好地优化
- P16【16】7.1 训练神经网络(下)-正则化
- P17【17】7.2 训练神经网络(下)-迁移学习
- P18【18】8 深度学习软件
- P19【19】9 CNN框架
- P20【20】10 循环神经网络1
- P21【21】10.1 循环神经网络2
- P22【22】10.2 循环神经网络3
- P23【23】11 识别和分割1
- P24【24】11.1 识别和分割2
- P25【25】11.2 图像目标检测和图像分割
- P26【26】12 可视化和理解1
- P27【27】12.1 可视化和理解2
- P28【28】13 生成模型1
- P29【29】13.1 生成模型2
- P30【30】13.2 生成模型3
- P31【31】14 深度增强学习1
- P32【32】14.1 深度增强学习2
- P33【33】15 深度学习的方法及硬件
- P34【33】15.1 对抗样本和对抗训练
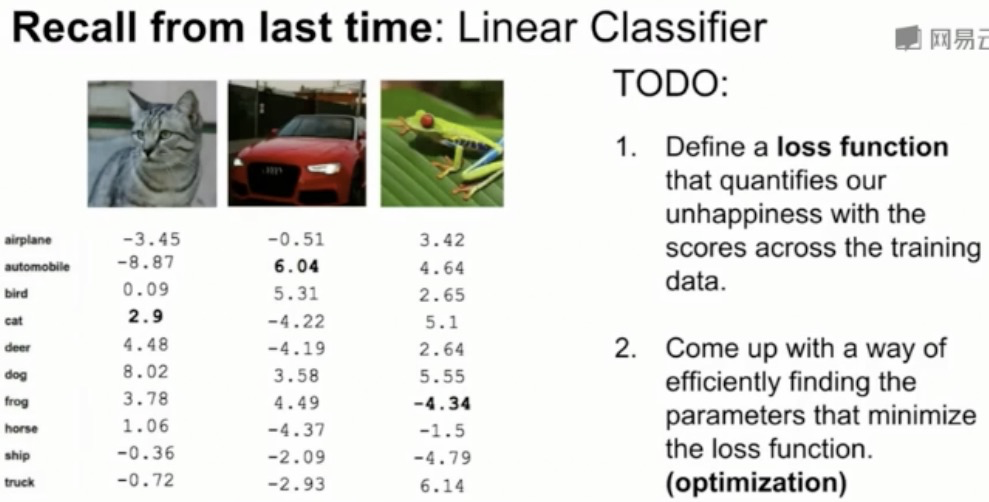
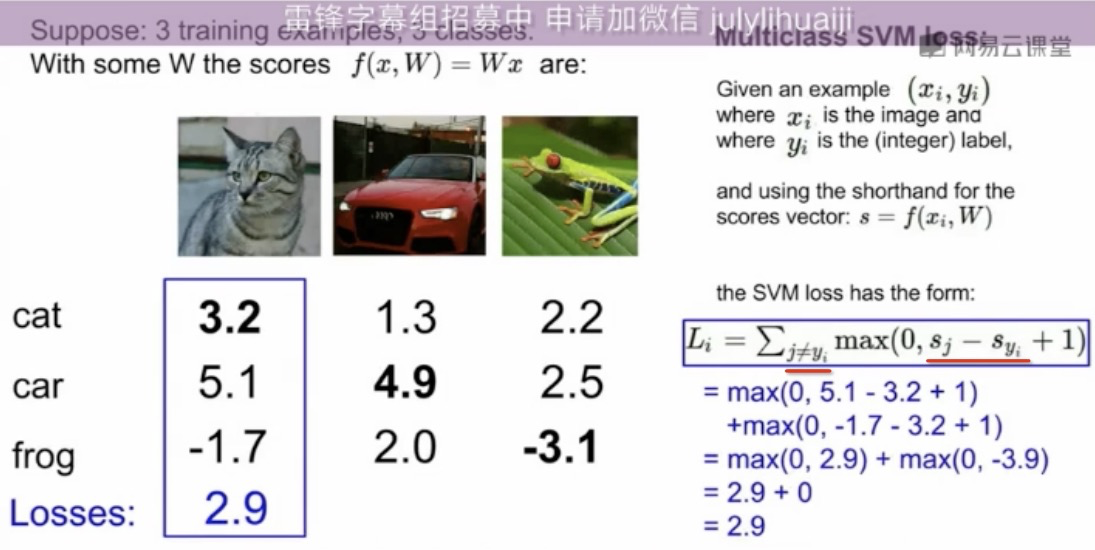
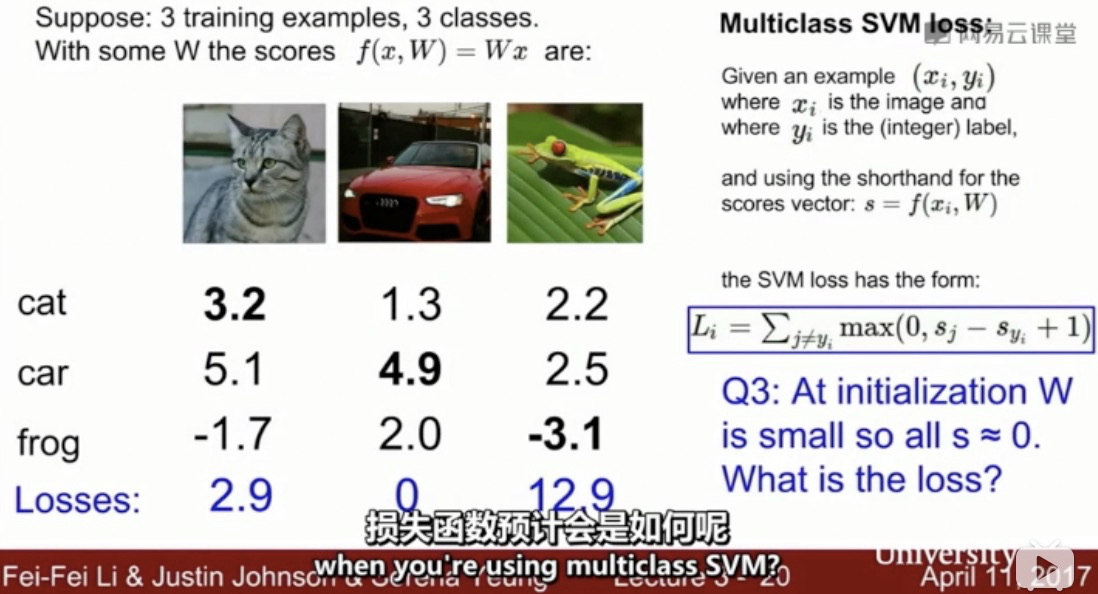
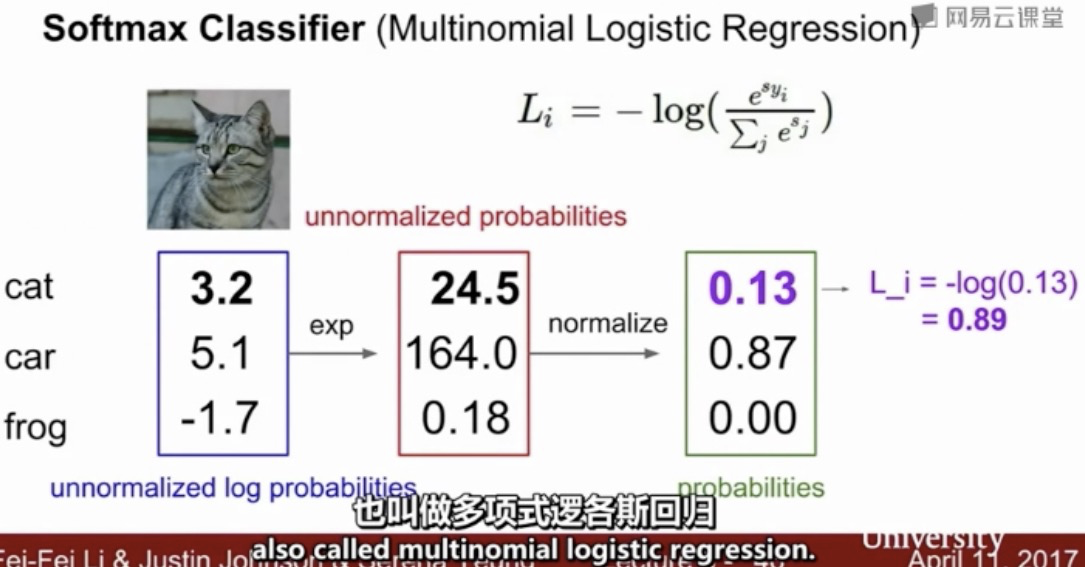
初始Loss:C-1
0>= s_j - s_yj +1 => s_j<= s_yj-1 ,有一个安全间隔,s_j(错误分类)只要比 s_yj 少1 就好了,一定要至少少1,再少太多就不关心了;
--> 取参数 delta ,只要fitted curve 在 点的 delta-TR 邻域内;—— delta 可以根据点集密度 Bayesian 调整 ——
- 在TR邻域内采样(均匀采样?采多少比例?)——如何评价邻域的覆盖度好坏?
- 只要deviation 在delta 以内,就算 fit 住?
点稀的地方应 min 波动 --> 兼顾 全局 & 局部
先高阶多项式,然后再根据样本点局部加权插值调整?
先找样本点的“闭包”?
partially-observable LS?
需要在多大的范围内 采样 和 fit ?——离所有样本点(+ TR 采样点)都要比较“近”,max deviation 需要contrained 住
样本少 + 模型容量大,才容易过拟合
statistically fit v.s. 样本点 fit
样本点 fit v.s. 置信度/区间?
如何刻画一条曲线的“波动/平滑程度”?
样本点少,根本不足以判断是一次还是二次还是三次,能用一次 fit 就用一次 fit,因为二次的局部就是一次
“simple” —— 二次、三次也可以很 simple ....,不一定次数高就比次数低复杂... —— 比如可以拿一个二次或三次的局部(近似线性)...
所以问题的关键是:在样本所在的前后一段区间范围内,曲线不能波动太大... 要“平稳”
平稳——cconvex hull 面积(体积)要小?
平稳——当新增加样本点之后,模型不能变化太大?
拟合曲线上新取点,离群度低—— loss 函数 边际增加小
--> 以现有样本点“似然”,新样本点呈 Gaussian 状分布?
——点稀的地方,过拟合的曲线变异更大!!——点稀的地方,应该更“保守”——更从“局部”考虑;——loss 不应该用 1/N 平均加权,mixture Gaussian 密度更小的地方,更应该和附近的已知样本点保持平滑 ——越稀越平滑 —— mixture Gaussian 密度更小的地方,直接局部插值——增加(从已知样本点插值得到的新)样本点;反倒是 mixture Gaussian 密度更大的地方(已知样本点的地方),需要 loose fit tolerance ...
1/N loss function 加权系数,应该与样本点的密度成反比
连续 n 次 v.s. 离散(分段线性),哪种方式更可取?分几段?数值问题了...
二次还是三次,和一般的 lambda * 0/1/2 范数,还不一样 ...

Fancier?
stochastic depth?
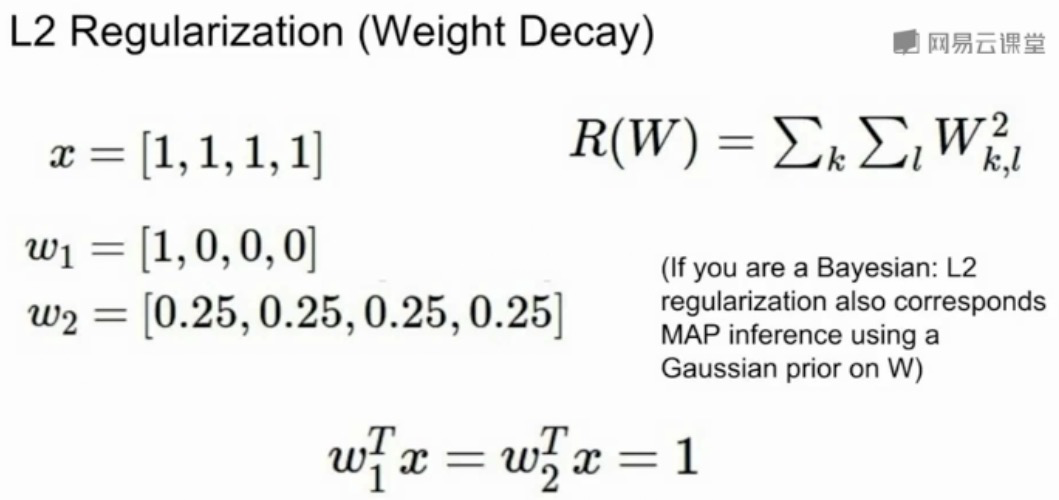
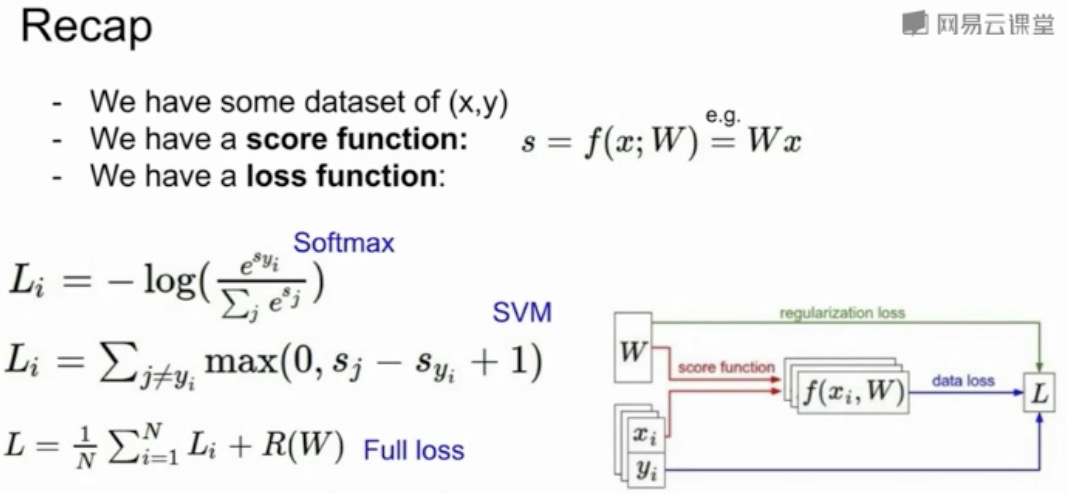
L2 正则对应 Gaussian prior 的MAP推断
P6:
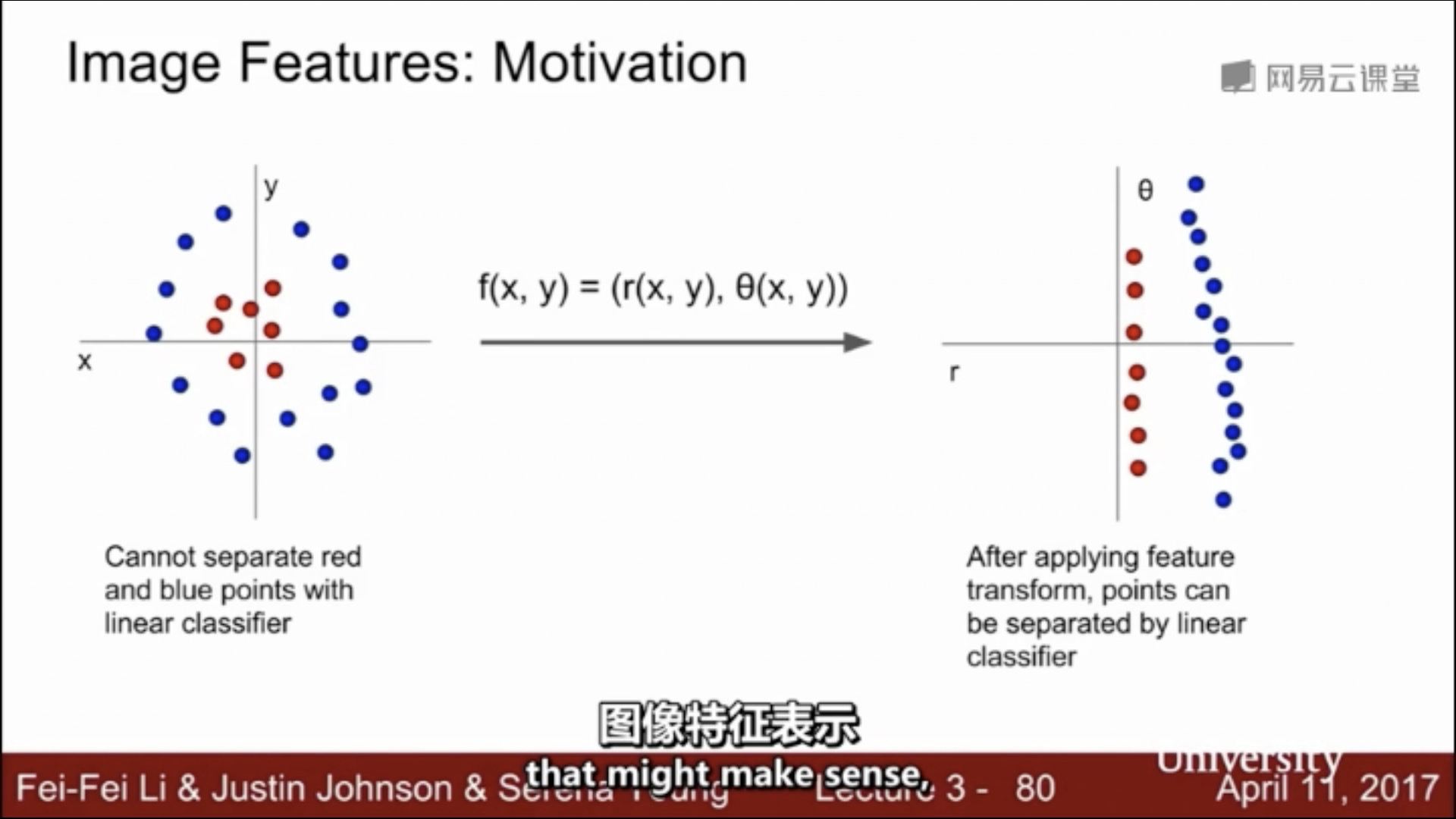
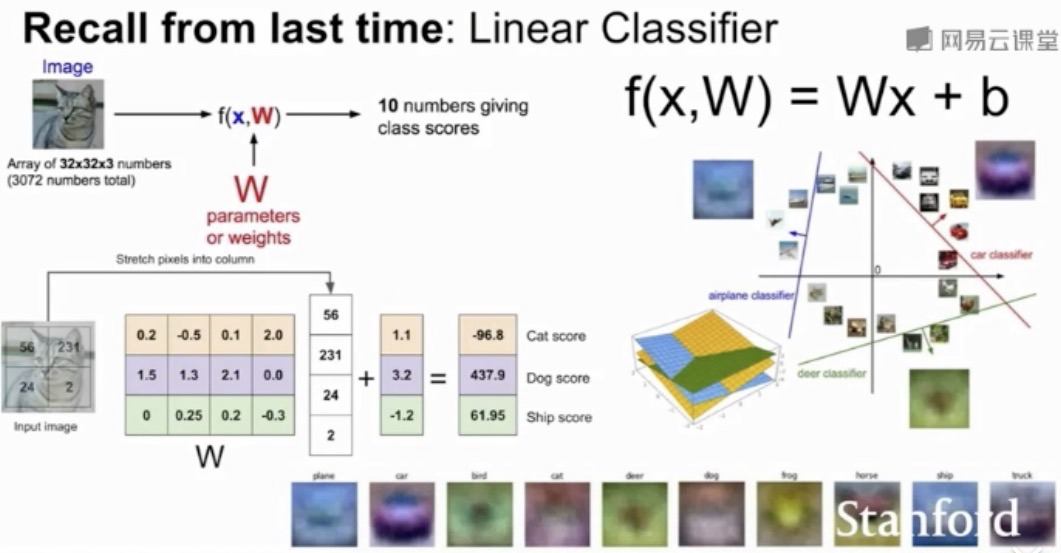
核心:非线性特征变换 + 线性分类器?
--> 非线性分类器?
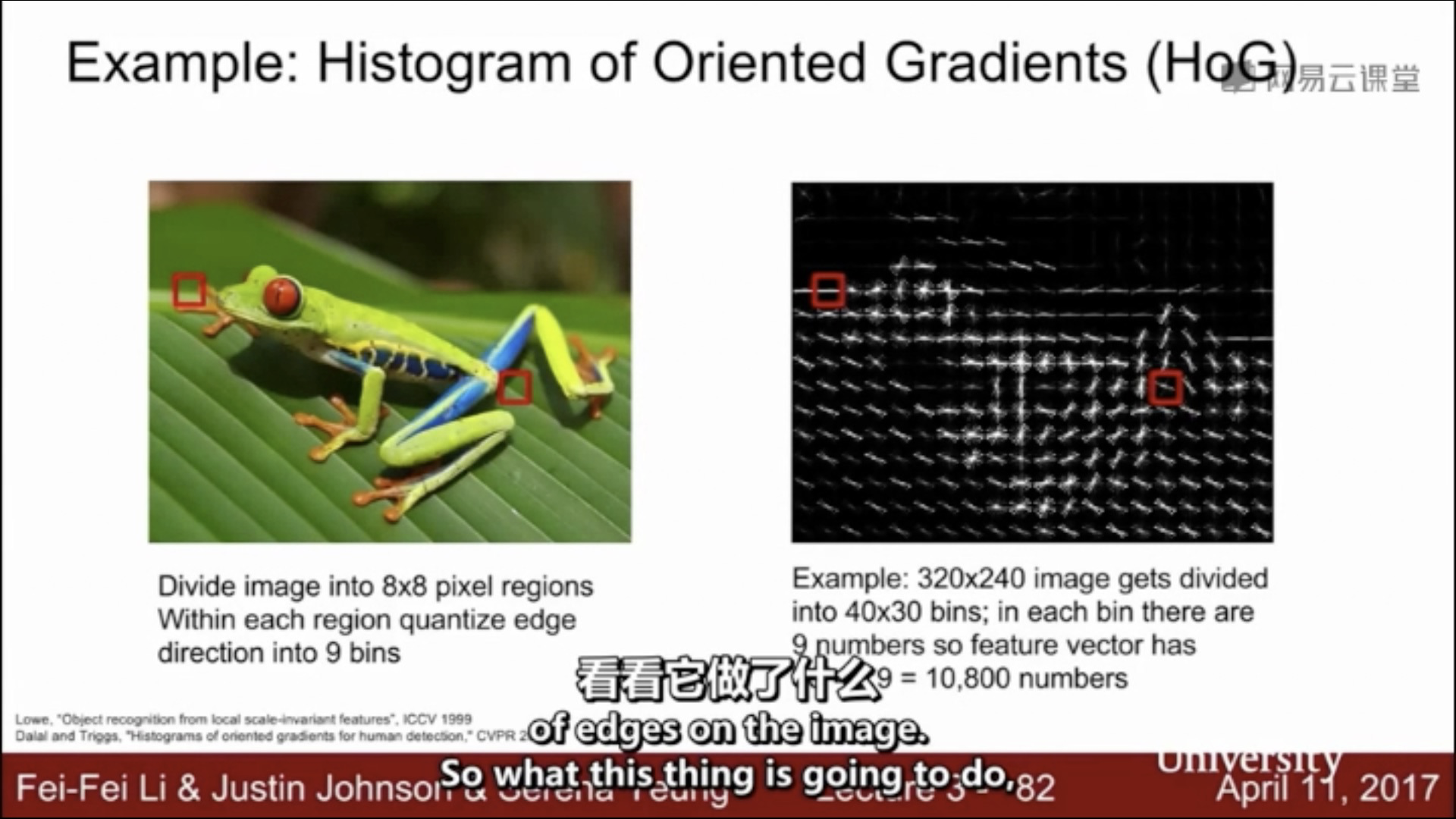
--> HoG 旁路 + CNN DL?
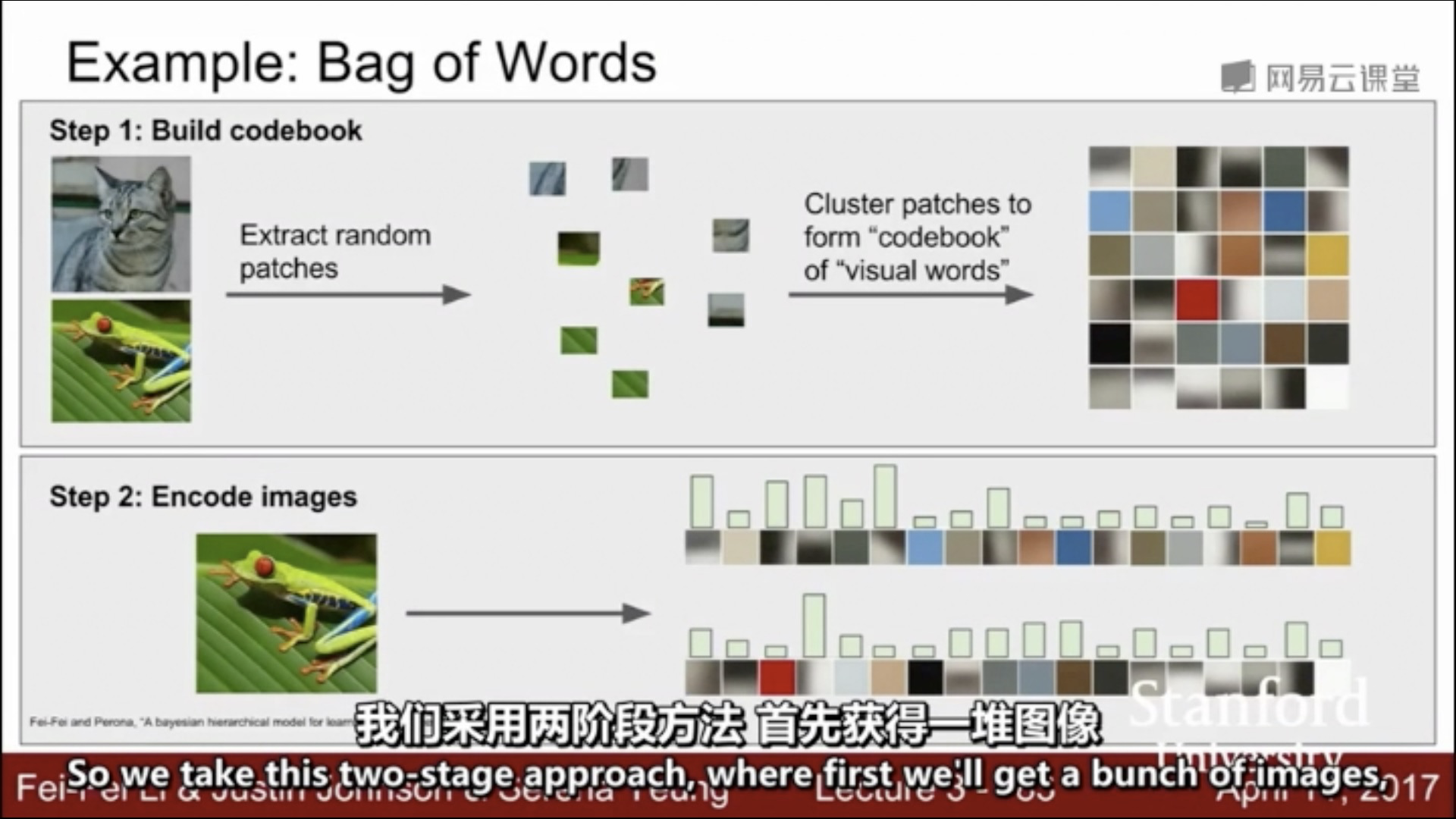
two-stage -> end-to-end
模型(连续地)选 vocab
-->
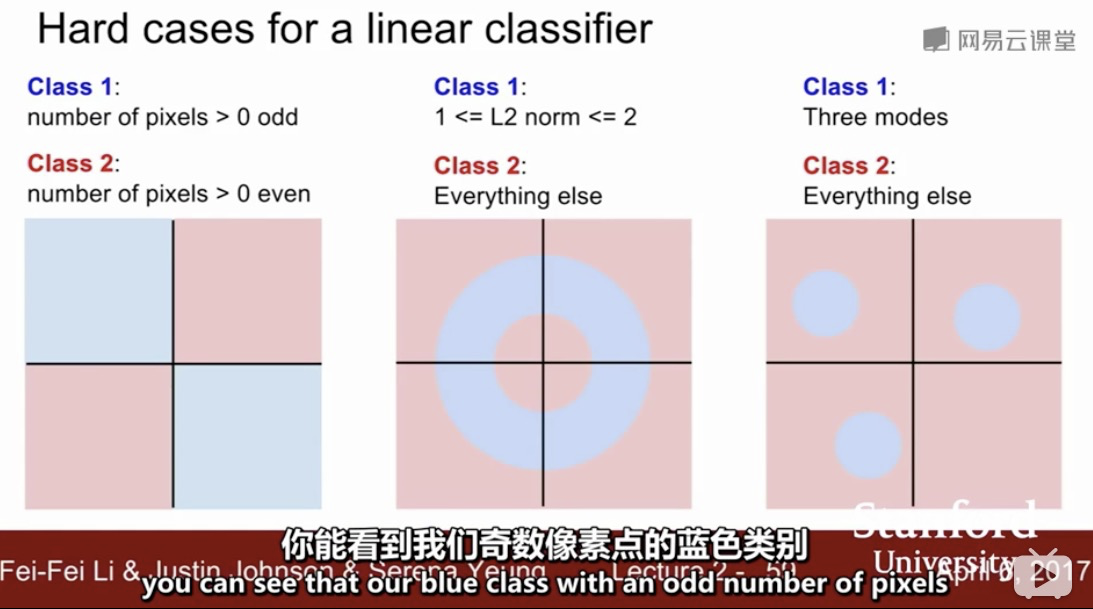
线性不可分:一个超平面不可分,多个超平面也不可分 ... 上图中间case 是 无穷超平面不可分。。。进一步将 线性不可分 的概念精细化
-->
线性不可分:一定是一个 “低维流形”上的概念;因为只要升维(比如最严重的情形 data leakage:直接加入 label 维,则一定可分~)——这不是我们想要的,我们想要的是“Bayesian 常识”层面的升维;比如经典的平面上“新月形”两类不可分,但升至三维即可分的例子——实际上是 data leakage 了 ... 但这个 data leakage 可以通过某种 “平滑/常识”(高维曲线嵌入低维流形形成数据集--我们要做的是从这个低维数据集去推断最可能的高维曲线,满足一定的目标指标最小化--> 逆流形学习??)这才是真正的“学习”,而不是简单的分类;
但实际上正常一般的机器学习模型就是在干类似的事情?怎么来定义和衡量这个“目标指标”?--参考“流形学习”的内容
- 高维(可分):正类、负类、超平面 S —— 未知,需要推断
- 低维(不可分):正类、负类、超平面在低维的投影 P —— 未知(P亦未知),P和S有投影关系:在这个投影关系上下手做文章?
- P不唯一,在升维的这个维度上,截距不同则不同,需要“中心化”——升维不止一个维度
CTR预估,CoEC 的原理其实有点类似;但只是 sparse (rating) click matrix 上的 look alike;—— 对应到一般的ML分类/回归问题上呢?怎么定义“常识”并incorporate 进来?
特征工程只是在低维流形上对现有维度特征各种组合...是假“升维”,不太可能预测到真“升维”?... —— 真升维应该从 label 入手(比如现有特征多和 CoEC 这种特征做交叉组合...)... 可以发展一套系统化地升维的办法论...
embedding,模型角度是升维,先降维至dense 向量空间,再喂入分类模型 --> 这两个阶段 end to end 一起训练。。。其实是 encoder-decoder 架构 ... 那 wide 部分相当于是 U-net 或 dense-net 的直连?可以系统化地搞,连各种 high way,效果说不定好 ... 就是高层能直接见到底层的特征~AutoML了... 上界在哪?
CoEC 也有一个很隐晦的 data leakage 的问题——样本是有时间点的,也应该滚动地给,应该会有提升~
多分类,Hauffmann 树可能有帮助,一层一层选(这里的层可以是商品类目、可以召回的通路 ... 等等)
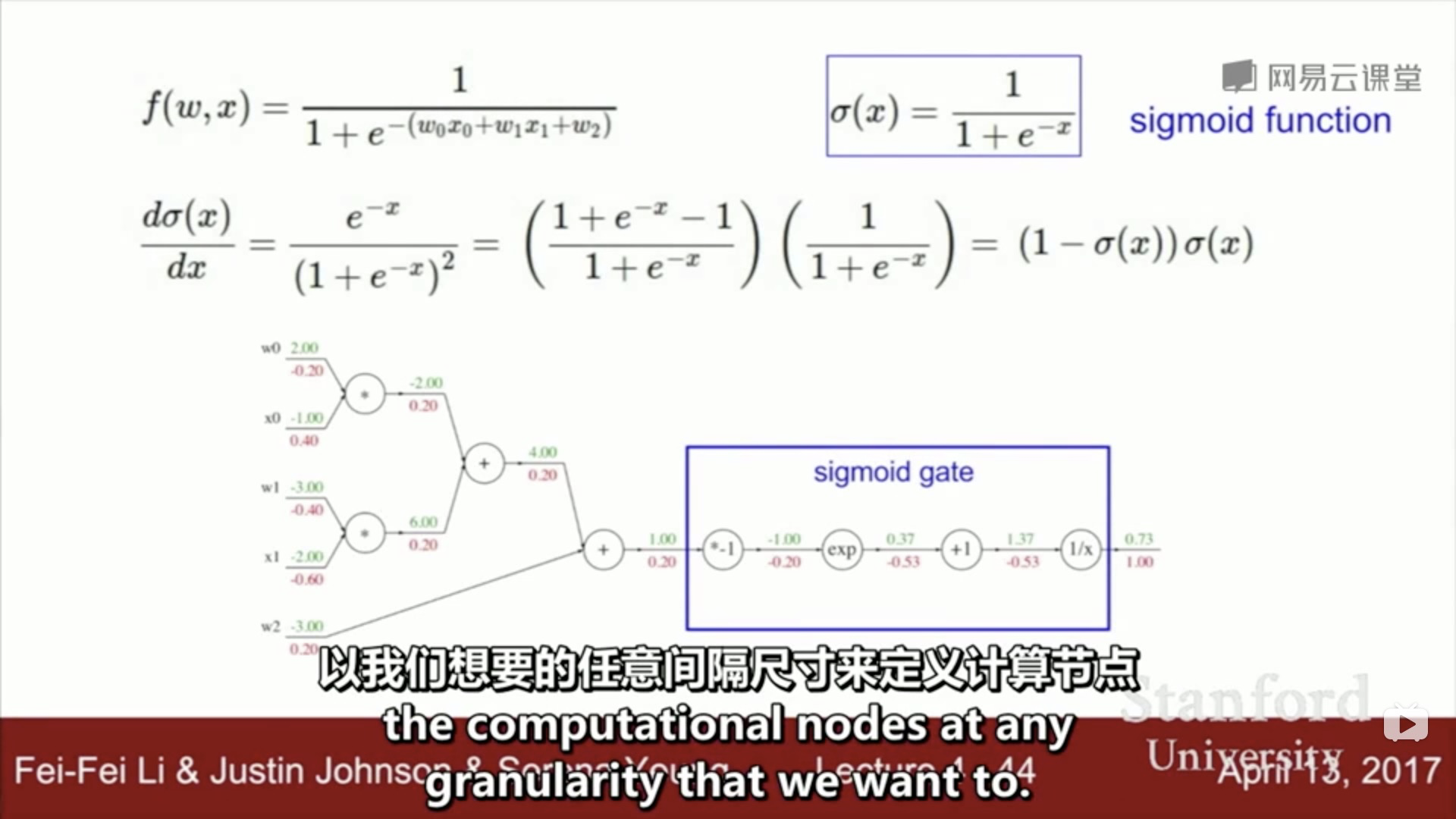
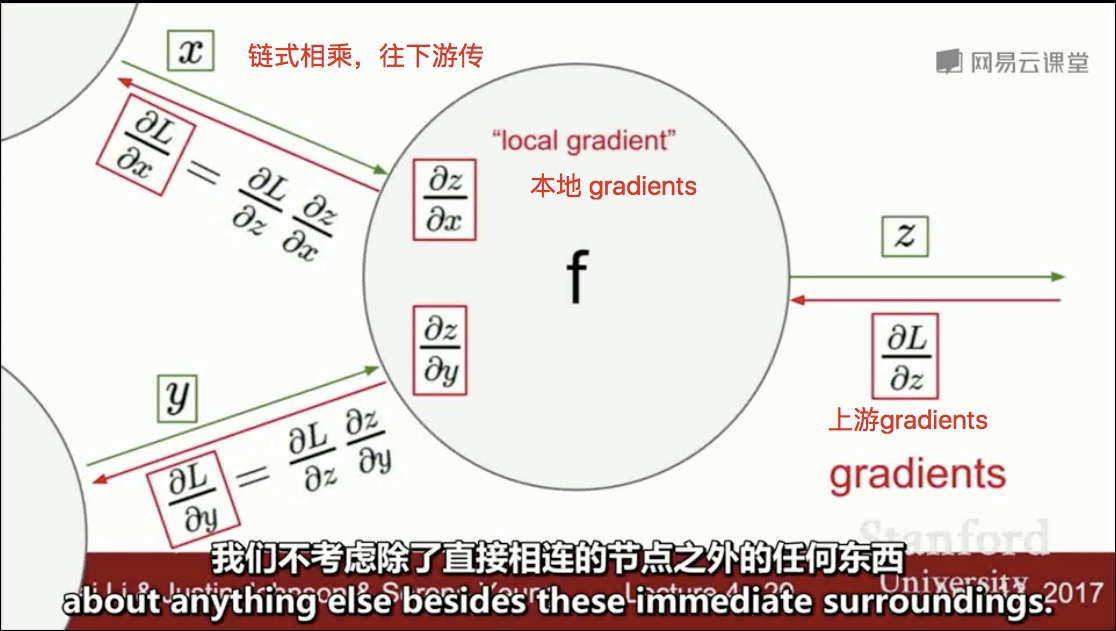
BP链氏求导法则:
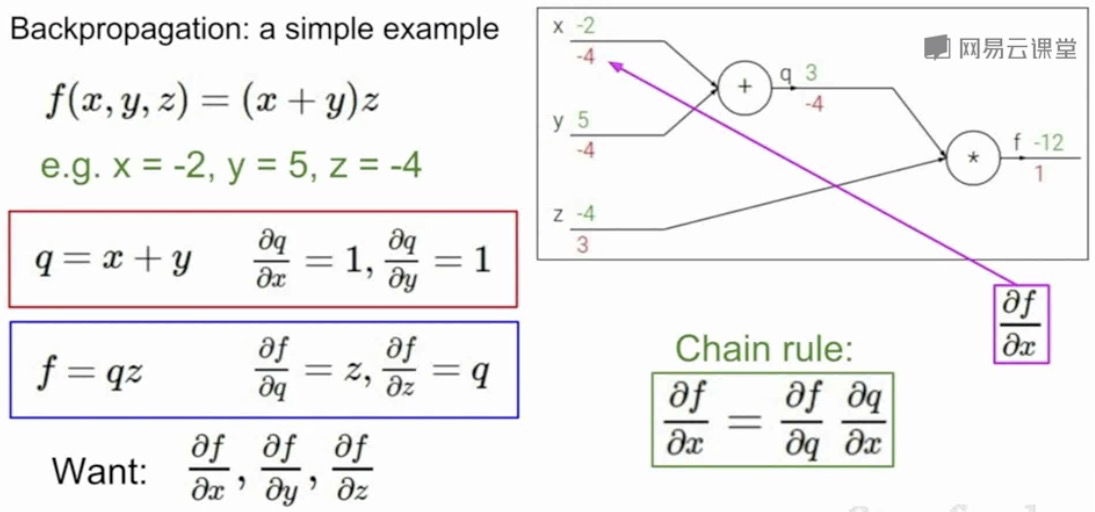
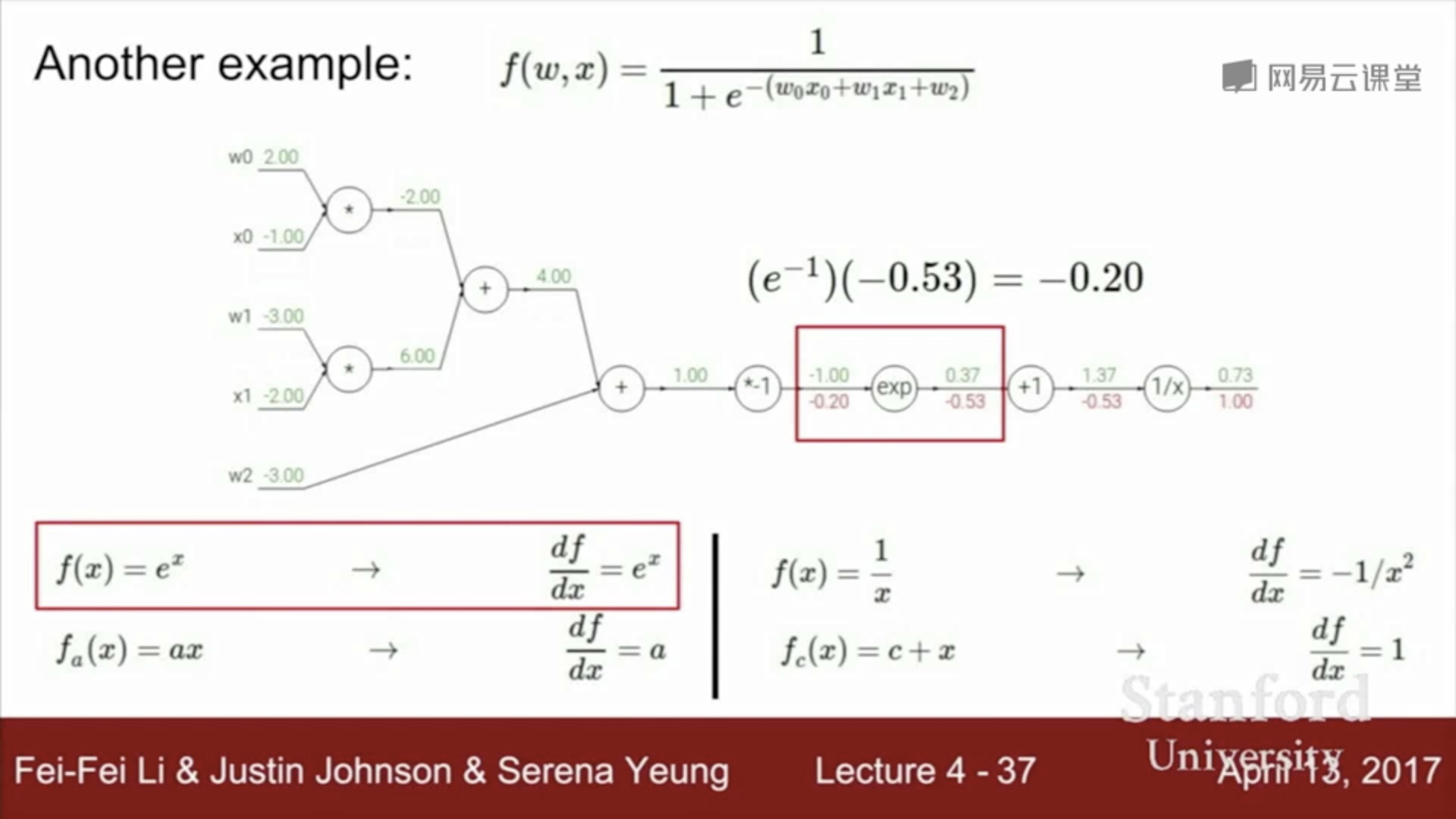
-->上图像AST一样拆得太细了,能否做相应的组合,合并一些简短的公式“模板”,推导出解析表达式,减小中间内存占用?