记得把这几点描述好咯:代码实现过程 + 项目文件结构截图 + 演示效果
1.准备工作
1.1 训练集和测试集准备
- 先将数据集手动划分成训练集和测试集,并分好类,比如第一类就放在文件夹名为
0的文件夹下,第二类就是1,如此类推。
当前程序只能处理10类以下车标,因为当前程序逻辑不支持10以上的数字识别(具体可以仔细看下代码)
所有训练集的图片放在train文件夹中,测试集放在test文件夹下。最终的文件树如下:
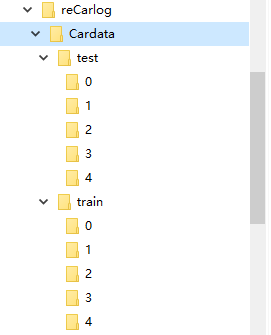
reCarlog是工程名,即Cardata和main.cpp同目录。- 测试集的类别数字和训练集的要一一对应。因为程序将要用它们作为分类依据。
- 在
main.cpp目录下准备两个文件,trainpath.txt和testpath.txt,用以保存所有训练集和测试集图片的路径。程序需要这两个文件来读取训练集和测试集的图片。举例如下(trainpath.txt)
./Cardata/train/0/train_citroen1.jpg
./Cardata/train/0/train_citroen10.jpg
./Cardata/train/0/train_citroen100.jpg
./Cardata/train/0/train_citroen101.jpg
建议使用相对路径。
这样,当我们读取一张图片的时候,可以利用图片的路径名称,通过split调用确定该车标的类别(使用切分字符'/',第4个值即类别(0,1,2,3,4...))
2.实现步骤
2.1 代码概览
代码很简单,就一个main.cpp文件。大致分为以下3块
- 全局变量:比如整理好的数据集,标签集,HOG特征向量
- 全局函数:模块划分,使得
main函数不显得臃肿。 - 自定义网络类:
myNeraulNetwork用于搭建简单BP网络和训练预测
2.2 运行流程
分3步:
- 训练集装载
- 定义网络+训练网络
- 测试网络
2.2.1 训练集装载
全局变量设定:
#define N_SAMPLE 1000
#define F_NUM 1764
#define CLASSNUM 5
float Data[N_SAMPLE][F_NUM]; // 数据存放
float Label[N_SAMPLE][CLASSNUM] // 标签存放
训练网络输入是两个二维矩阵,第一个矩阵是数据矩阵(第一维是样本个数N_SAMPLE,第二维是每个样本的特征向量是,宽度为F_NUM),第二个矩阵是标签矩阵,对应每个样本,都有一个类别标签,如果是第一类,则它的标签向量为1,0,0,0,0(本例是5维)。
这里主要提一下数据矩阵的第二维是怎么确定的。
每个样本的特征向量即每张图片的HOG特征。HOG特征是一个一维向量。
HOG特征维度确定
对于一张图片,使用一个滑动窗口以一定的步进滑动,分别获取每个窗口的特征值,是一般的人工图像特征提取方式。简单说下HOG特征的提取。
假设一张图片的维度是img_size=64x64,我们使用的滑动窗口大小为block_size=16x16,滑动步进stride=8x8,那么对一个这样的图像,能得到(64-8)/8 x (64-8)/8=7x7=49个窗口,对于每个窗口block,HOG特征细分为胞元cell_size=8x8。于是一个block就有2x2=4个胞元,每个胞元默认有9个特征值,所以在上述参数的情况下,HOG特征的维度为49x4x9=1764,这也是本工程的默认参数。
opencv自带HOG特征提取,
img_size、block_size、stride和cell_size都需要自行设定,因此需要事先计算好特征维度,才能确定数据矩阵第二维的宽度。
装载过程
read trainpath.txt; // 读取路径文件
for each trainImg in trainpath.txt :
getHOG(trainImg) // 获取HOG特征
getLabel according to its path
put its hog into Data[][]
put its label into Label[][]
2.2.2 定义网络+训练网络
对opencv自带网络类进行了简单的封装,如下:
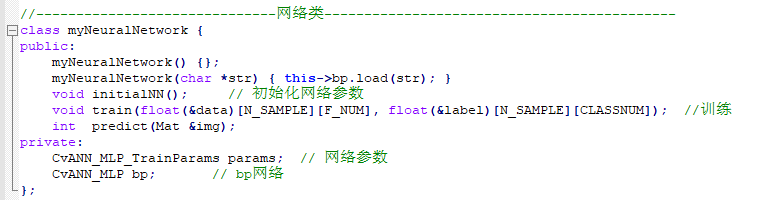
定义和使用代码里说的很清楚了,这里再提下两个构造函数:
带参数的构造函数使用网络参数文件名作为参数。可以直接使用训练好的网络参数文件直接初始化网络,而不需要initialNN。
2.2.3 测试网络
读取测试文件,输入网络,获得输出。
输入为每次一个图片,所以输入的二维矩阵为
test[1][F_NUM]。myNerualNetwork().predict(img)获得一个预测值,可以跟实际值(分析文件路径名获得)做对比,得到分类正确率。
3.其他注意事项
- 使用宏定义来进行训练or测试
- Opencv的安装配置查看教程
- 还有其他问题可直接私戳
4.运行效果
 基于Opencv自带BP网络的车标简易识别
基于Opencv自带BP网络的车标简易识别
注:本文著作权归作者,由demo大师代发,拒绝转载,转载需要作者授权