1、在Unity中使用A*寻路方法步骤(这里暂不对A*算法进行讲解)
(1)导入A*寻路插件(该插件需要在较高版本使用【例如2017,5.6无法使用】)—搭建场景—场景中设置两个层级,地面(Ground)和障碍物(Obstacle)且分别为地面和障碍物设置对应的层—设置两个标签,地面(Ground)和障碍物(Obstacle)且分别为地面和障碍物设置对应的标签
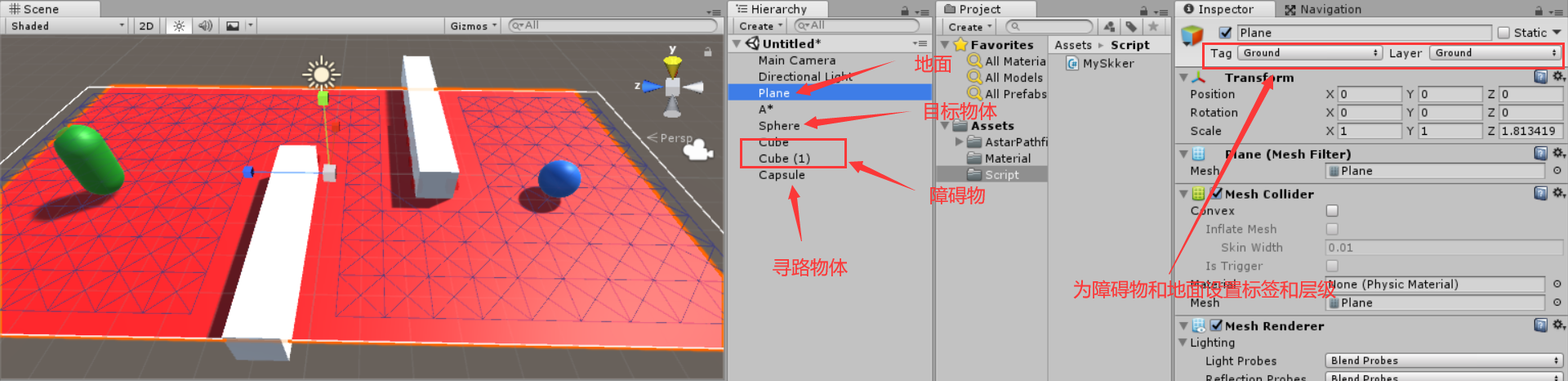
(2)创建一个空物体命名为“A*”,为其添加Astar Path组件(组件库中搜Pathfinder组件或【Components–>Pathfinding–>Pathfinder】),用于设置寻路参数
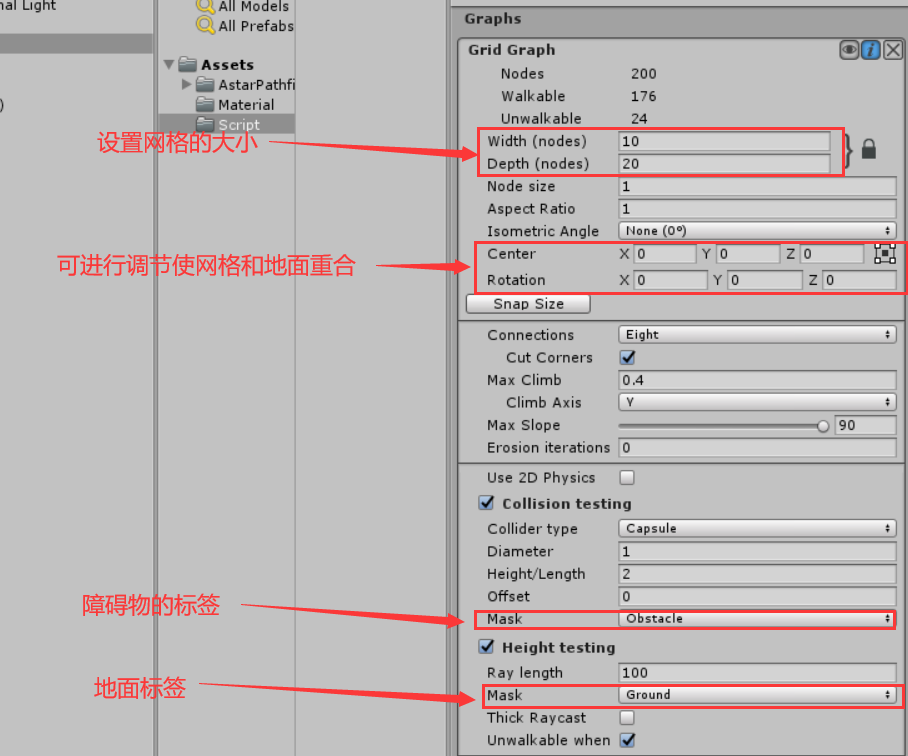
(3)在Astar Path组件的Graphs选项中选择Grid Graph—在面板中对各种参数进行详细设置—点击Scan可查看场景中形成的网格
(4)为寻路物体添加Seeker脚本—创建C#脚本,编译代码,并挂载到寻路物体上
using System.Collections; using System.Collections.Generic; using UnityEngine; using Pathfinding;//需要引入Pathfinding public class MySkker : MonoBehaviour { public GameObject target; //目标物 private Seeker seeker1; private Path path1; //路径 private float nextwaypointDistance=1; //距离下一个点的距离 private int currentwaypoint = 0; //当前路点 public float speed = 100; public float rotspeed = 60; //旋转速度 // Use this for initialization void Start () { seeker1 = this.GetComponent<Seeker>(); seeker1.pathCallback += OnpathCompeleter; seeker1.StartPath(transform.position,target.transform.position); } // Update is called once per frame void Update () { if (path1==null) { print("为空了"); return; } if (currentwaypoint>=path1.vectorPath.Count) { return; } Vector3 dir = (path1.vectorPath[currentwaypoint] - transform.position).normalized; dir *= speed * Time.deltaTime; transform.Translate(dir,Space.World); Quaternion targetrotation = Quaternion.LookRotation(dir); transform.rotation = Quaternion.Slerp(transform.rotation,targetrotation,Time.deltaTime*rotspeed); if (Vector3.Distance(transform.position,path1.vectorPath[currentwaypoint]) < nextwaypointDistance){ currentwaypoint++; return; } } private void OnpathCompeleter(Path p) { if (!p.error) { path1=p; currentwaypoint = 0; } } }