在用opencv编程时,经常需要可视化地查看某个矩阵在运算过程中的状态如何,而opencv中的imshow函数只能以灰度显示单通道uchar或float类型的图像,其可视化效果不尽人意,为此,我写了一个矩阵可视化工具包,其中包含了一个类似于matlab中的imagesc的函数,能够以不同的颜色显示矩阵中不同大小的值,这个函数在查看矩阵时非常方便,这里贡大家参考。
VisualizationTool.h
 View Code
View Code

//http://www.cnblogs.com/easymind223 #pragma once #ifndef _VISUALIZATION_TOOL_H_ #define _VISUALIZATION_TOOL_H_ #include "opencv2/opencv.hpp" #define HIST_TYPE_MIX 0 #define HIST_TYPE_CONTOUR 1 namespace VisualizationTool { //深度显示单通道uchar,float, int类型图像, void imageSC(std::string windowName, const cv::Mat imgC1); //以柱状图显示数组,array必须为 CV_32F,CV_32S,CV_8U中的一种,且rows == 1 void ShowArrayHistogram(std::string title, cv::Mat array, cv::Size size = cv::Size(400,400)); //显示一幅图像的直方图,histType为显示方式,HIST_TYPE_MIX表示三通道混合显示,HIST_TYPE_CONTOUR表示以轮廓显示 void showImageHistogram(const std::string windowName, const cv::Mat src, const cv::Mat mask = cv::Mat(), int histType = HIST_TYPE_MIX, cv::Size windowSize = cv::Size(256, 200)); //显示一幅图像的颜色分布图 void showImageColorDistribution(const std::string windowName, const cv::Mat src_3u, int nBins = 32, const cv::Mat mask = cv::Mat(), cv::Size windowSize = cv::Size(256, 200)); } #endif
VisualizationTool.cpp
View Code
#include "stdafx.h" #include "VisualizationTool.h" namespace VisualizationTool { void imageSC(std::string windowName, const cv::Mat imgC1) { assert(imgC1.channels() == 1 && !imgC1.empty()); //get min max value of the mat double minPixelValue, maxPixelValue; cv::minMaxIdx(imgC1, &minPixelValue, &maxPixelValue); double valueRange = maxPixelValue - minPixelValue; //init color table const int minSaturation = 20; const int colorTableLength = (255 - minSaturation) * 4; // r -> g -> b cv::Scalar colorTable[colorTableLength]; int i,j; for (i = 0, j = minSaturation; i < colorTableLength / 4; i++, j++) colorTable[i] = CV_RGB(255, j, minSaturation); for (i = colorTableLength / 4, j=1; i < colorTableLength / 2; i++, j++) colorTable[i] = CV_RGB(255 - j, 255, minSaturation); for (i = colorTableLength/2, j=minSaturation; i < colorTableLength/4*3; i++, j++) colorTable[i] = CV_RGB(minSaturation, 255, j); for (i = colorTableLength/4*3, j=1; i < colorTableLength; i++, j++) colorTable[i] = CV_RGB(minSaturation, 255 - j, 255); //draw color table const int margin = 20; const int tableHeight = 300;; const int tableWidth = 150; const int barWidth = 30; const int barHeight = tableHeight - margin * 2; float scale = (float)barHeight / colorTableLength; int imageHeight = cv::max(imgC1.rows, tableHeight); int imageWidth = imgC1.cols + tableWidth; cv::Mat img3u( imageHeight, imageWidth, CV_8UC3, cv::Scalar::all(0)); for (int i=0; i<barHeight; i++) { cv::Point pt1(imgC1.cols + margin, margin + i); cv::Point pt2(imgC1.cols + margin + barWidth, margin + i); cv::line(img3u, pt1, pt2, colorTable[cvRound(i/scale)], 1); } //illustration for (int i=0; i<5; i++) { float value = minPixelValue + i / 4.0 * valueRange; std::stringstream s; s<<value; int bx = imgC1.cols + margin + barWidth; int by = tableHeight - margin - barHeight / 4 * i ; cv::line(img3u, cv::Point(bx+5, by), cv::Point(bx+10, by), cvScalarAll(255), 2); cv::putText(img3u, s.str(), cv::Point(bx + 20, by + 8), CV_FONT_HERSHEY_SIMPLEX, 0.6, cvScalarAll(255), 1); } //show image cv::Mat tim(imgC1.size(), CV_32F); imgC1.convertTo(tim, CV_32F); for (int y = 0; y < imgC1.rows; y++) { const float* srcData = tim.ptr<float>(y); cv::Vec3b* dstData = img3u.ptr<cv::Vec3b>(y); for (int x = 0; x<imgC1.cols; x++) { double pixel = (srcData[x] - minPixelValue) / valueRange; cv::Scalar color = colorTable[cvRound(pixel * (colorTableLength-1))]; dstData[x] =cv::Vec3b(color.val[2], color.val[1], color.val[0]); } } cv::imshow(windowName, img3u); } void ShowArrayHistogram(std::string title, cv::Mat hist, cv::Size size) { CV_Assert(hist.rows == 1); cv::Mat imHist = cv::Mat::zeros(size, CV_8UC3); int nBins = hist.rows*hist.cols; double min, max; cv::minMaxLoc(hist, &min, &max); double bin_width=(double)size.width/nBins; double bin_unith=(double)size.height/max; if(hist.type() == CV_32F) { float * ptr = hist.ptr<float>(0); for(int i=0;i<nBins;i++) { cv::Point p0=cv::Point(i*bin_width,size.height); cv::Point p1=cv::Point((i+1)*bin_width,size.height-ptr[i]*bin_unith); cv::rectangle(imHist, p0, p1, cv::Scalar::all(255), -1, 0, 0); } } if(hist.type() == CV_32S) { int* ptr = hist.ptr<int>(0); for(int i=0;i<nBins;i++) { cv::Point p0=cv::Point(i*bin_width,size.height); cv::Point p1=cv::Point((i+1)*bin_width,size.height-ptr[i]*bin_unith); cv::rectangle(imHist, p0, p1, cv::Scalar::all(255), -1, 0, 0); } } if(hist.type() == CV_8U) { uchar* ptr = hist.ptr<uchar>(0); for(int i=0;i<nBins;i++) { cv::Point p0=cv::Point(i*bin_width,size.height); cv::Point p1=cv::Point((i+1)*bin_width,size.height-ptr[i]*bin_unith); cv::rectangle(imHist, p0, p1, cv::Scalar::all(255), -1, 0, 0); } } cv::namedWindow(title); cv::imshow(title, imHist); } void showImageHistogram(const std::string windowName, const cv::Mat src, const cv::Mat mask, int histType, cv::Size windowSize) { CV_Assert(!src.empty()); if (!mask.empty()) { CV_Assert(mask.type() == CV_8U && src.size() == mask.size()); } cv::Mat src_3u; if(src.channels()==1) cv::cvtColor(src, src_3u, CV_GRAY2RGB); else src_3u = src; //shrink the src to save time float th_maxSide = 300.0; int maxSide = cv::max(src_3u.cols , src_3u.rows); cv::Mat zoom_3u, zoomMask_1u; if (maxSide > th_maxSide) { float scale = maxSide / th_maxSide; zoom_3u.create(src_3u.rows / scale, src_3u.cols / scale, CV_8UC3); cv::resize(src_3u, zoom_3u, zoom_3u.size(), 0, 0, cv::INTER_LANCZOS4 ); if(!mask.empty()) { zoomMask_1u.create(mask.rows / scale, mask.cols / scale, CV_8U); cv::resize(mask, zoomMask_1u, zoomMask_1u.size(), 0, 0, cv::INTER_LANCZOS4 ); } } else { zoom_3u = src_3u; if(!mask.empty()) zoomMask_1u = mask; } std::vector<cv::Mat> rgb_planes; cv::split(zoom_3u, rgb_planes ); int nBins = 255; /// 设定取值范围 ( R,G,B) ) float range[] = { 0, 256 } ; const float* histRange = { range }; bool uniform = true; bool accumulate = false; cv::Mat r_hist, g_hist, b_hist; /// 计算直方图: cv::calcHist( &rgb_planes[0], 1, 0, zoomMask_1u, r_hist, 1, &nBins, &histRange, uniform, accumulate ); cv::calcHist( &rgb_planes[1], 1, 0, zoomMask_1u, g_hist, 1, &nBins, &histRange, uniform, accumulate ); cv::calcHist( &rgb_planes[2], 1, 0, zoomMask_1u, b_hist, 1, &nBins, &histRange, uniform, accumulate ); // 创建直方图画布 int canvasWidth = windowSize.width; int canvasHeight = windowSize.height; int binWidth = cvRound( (double) canvasWidth / nBins ); cv::Mat histImage(canvasHeight, canvasWidth, CV_8UC3, cv::Scalar( 0,0,0) ); /// 将直方图归一化到范围 [ 0, histImage.rows ] cv::normalize(r_hist, r_hist, 0, histImage.rows, cv::NORM_MINMAX, -1, cv::Mat() ); cv::normalize(g_hist, g_hist, 0, histImage.rows, cv::NORM_MINMAX, -1, cv::Mat() ); cv::normalize(b_hist, b_hist, 0, histImage.rows, cv::NORM_MINMAX, -1, cv::Mat() ); /// 在直方图画布上画出直方图 if (histType == HIST_TYPE_CONTOUR) { for( int i = 1; i < nBins; i++ ) { cv::line( histImage, cv::Point( binWidth*(i-1), canvasHeight - cvRound(r_hist.at<float>(i-1)) ) , cv::Point( binWidth*(i), canvasHeight - cvRound(r_hist.at<float>(i)) ), cv::Scalar(255, 0, 0), 2, 8, 0 ); cv::line( histImage, cv::Point( binWidth*(i-1), canvasHeight - cvRound(g_hist.at<float>(i-1)) ) , cv::Point( binWidth*(i), canvasHeight - cvRound(g_hist.at<float>(i)) ), cv::Scalar( 0, 255, 0), 2, 8, 0 ); cv::line( histImage, cv::Point( binWidth*(i-1), canvasHeight - cvRound(b_hist.at<float>(i-1)) ) , cv::Point( binWidth*(i), canvasHeight - cvRound(b_hist.at<float>(i)) ), cv::Scalar( 0, 0, 255), 2, 8, 0 ); } } else if (histType == HIST_TYPE_MIX) { for (int iBin=0; iBin<nBins; iBin++) { for (int iValue=1; iValue < r_hist.at<float>(iBin); iValue++) { for (int j=0; j<binWidth; j++) { cv::Vec3b& pixel = histImage.at<cv::Vec3b>(canvasHeight - iValue, iBin * binWidth + j); pixel.val[0] = 255; } } for (int iValue=1; iValue < g_hist.at<float>(iBin); iValue++) { for (int j=0; j<binWidth; j++) { cv::Vec3b& pixel = histImage.at<cv::Vec3b>(canvasHeight - iValue, iBin * binWidth + j); pixel.val[1] = 255; } } for (int iValue=1; iValue < b_hist.at<float>(iBin); iValue++) { for (int j=0; j<binWidth; j++) { cv::Vec3b& pixel = histImage.at<cv::Vec3b>(canvasHeight - iValue, iBin * binWidth + j); pixel.val[2] = 255; } } } } cv::imshow(windowName, histImage ); } bool histCompare(std::pair<cv::Scalar,int> v1, std::pair<cv::Scalar,int> v2) { return v1.second < v2.second; } int countValueAppearTimes(const cv::Mat srcC1, double value) { CV_Assert(!srcC1.empty() && srcC1.channels()==1); cv::Mat r = srcC1 - value; int times = cv::countNonZero(r); return srcC1.cols * srcC1.rows - times; } void showImageColorDistribution(const std::string windowName, const cv::Mat src_3u, int nBins, const cv::Mat mask, cv::Size windowSize) { CV_Assert(!src_3u.empty() ); if (!mask.empty()) { CV_Assert(mask.type() == CV_8U && src_3u.size() == mask.size()); } //shrink the src to save time float th_maxSide = 300.0; int maxSide = cv::max(src_3u.cols , src_3u.rows); cv::Mat zoom_3u, zoomMask_1u; if (maxSide > th_maxSide) { float scale = maxSide / th_maxSide; zoom_3u.create(src_3u.rows / scale, src_3u.cols / scale, CV_8UC3); cv::resize(src_3u, zoom_3u, zoom_3u.size(), 0, 0, cv::INTER_LANCZOS4 ); if(!mask.empty()) { zoomMask_1u.create(mask.rows / scale, mask.cols / scale, CV_8U); cv::resize(mask, zoomMask_1u, zoomMask_1u.size(), 0, 0, cv::INTER_LANCZOS4 ); } } else { zoom_3u = src_3u; if(!mask.empty()) zoomMask_1u = mask; } int maskNonZero = countNonZero(zoomMask_1u); //k-means cluster cv::Mat clusterMat; cv::Mat bestLabels, centers; cv::Vec3b* data = zoom_3u.ptr<cv::Vec3b>(0); if(mask.empty()) { clusterMat.create(zoom_3u.cols * zoom_3u.rows, 3, CV_32F); for (int i=0; i<zoom_3u.cols * zoom_3u.rows; i++) { cv::Vec3b pixel = data[i]; clusterMat.at<float>(i, 0) = pixel.val[0]; clusterMat.at<float>(i, 1) = pixel.val[1]; clusterMat.at<float>(i, 2) = pixel.val[2]; } } else { clusterMat.create(maskNonZero, 3, CV_32F); const uchar* maskData = zoomMask_1u.ptr<uchar>(0); for (int i=0, j=0; i<zoomMask_1u.cols * zoomMask_1u.rows; i++) { if(maskData[i] > 0) { cv::Vec3b pixel = data[i]; clusterMat.at<float>(j, 0) = pixel.val[0]; clusterMat.at<float>(j, 1) = pixel.val[1]; clusterMat.at<float>(j, 2) = pixel.val[2]; j++; } } } cv::kmeans(clusterMat, nBins, bestLabels, cv::TermCriteria( CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 10, 1.0), 3, cv::KMEANS_PP_CENTERS, centers); //statistics std::vector<std::pair<cv::Scalar,int>> hist(nBins); for (int i=0; i<nBins; i++) { cv::Scalar color( centers.at<float>(i,0), centers.at<float>(i,1), centers.at<float>(i,2)); int val = countValueAppearTimes(bestLabels, i); hist.at(i) = std::pair<cv::Scalar,int>(color, val); } std::sort(hist.begin(), hist.end(), histCompare); int maxValue = hist[nBins-1].second; //canvas float scale = (float)windowSize.height / maxValue; int binWidth = windowSize.width / nBins; cv::Mat canvas(windowSize, CV_8UC3, cv::Scalar::all(30)); for (int i=0; i<nBins; i++) { cv::Point pt1( i * binWidth, canvas.rows - 1); cv::Point pt2( (i+1) * binWidth, canvas.rows - 1 - hist[i].second * scale); cv::rectangle(canvas, pt1, pt2, hist[i].first, -1); } cv::imshow(windowName, canvas); } }
注意:由于博客园的bug, cpp文件中的kmeans函数会复制不全,复制以后可能会少一个参数,请仔细检查
解释一下文件中的几个函数:
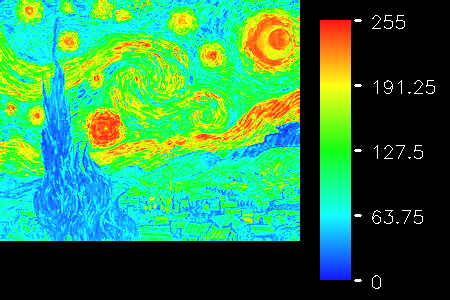
1. void imageSC(std::string windowName, const cv::Mat imgC1)
深度显示单通道uchar,float, int类型图像,类似于matlab的imagesc函数,本函数还自带颜色表和矩阵的值域分布
例:

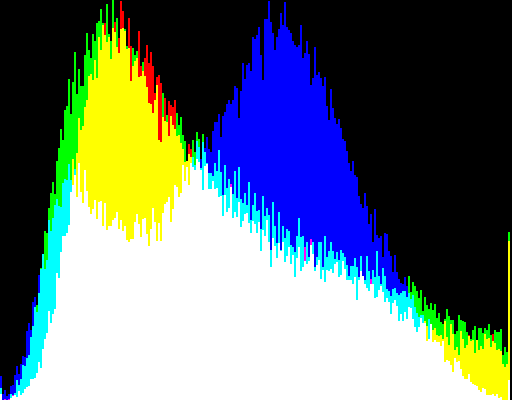
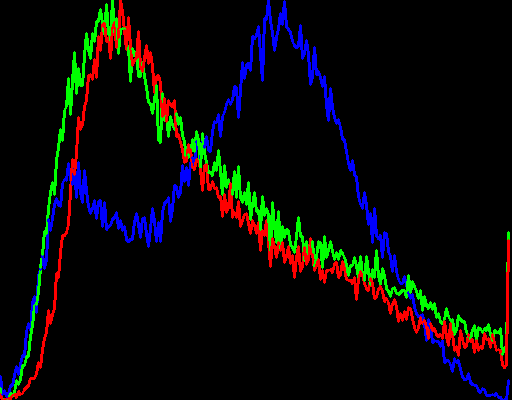
2. void showImageHistogram(const std::string windowName, const cv::Mat src, const cv::Mat mask = cv::Mat(), int histType = HIST_TYPE_MIX, cv::Size windowSize = cv::Size(256, 200));
显示一幅图像的直方图,histType为显示方式,HIST_TYPE_MIX表示三通道混合显示,HIST_TYPE_CONTOUR表示以轮廓显示,窗口的宽度最好是256的倍数。
例:

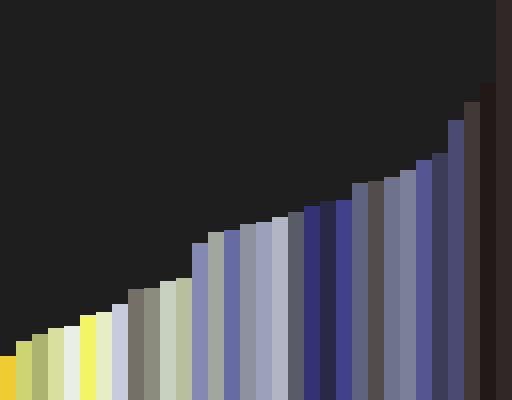
3.void showImageColorDistribution(const std::string windowName, const cv::Mat src_3u, int nBins = 32, const cv::Mat mask = cv::Mat(), cv::Size windowSize = cv::Size(256, 200));
显示一幅图像的颜色分布图,这个函数有点慢,结果也有一定的不确定性,因为用到了k-means,函数的速度取决于nBins的大小,窗口的宽度最好是256的倍数。
例:
4. void ShowArrayHistogram(std::string title, cv::Mat array, cv::Size size = cv::Size(400,400));
以柱状图显示一维数组,array必须为 CV_32F,CV_32S,CV_8U中的一种,且rows == 1,这个函数就不贴图了~