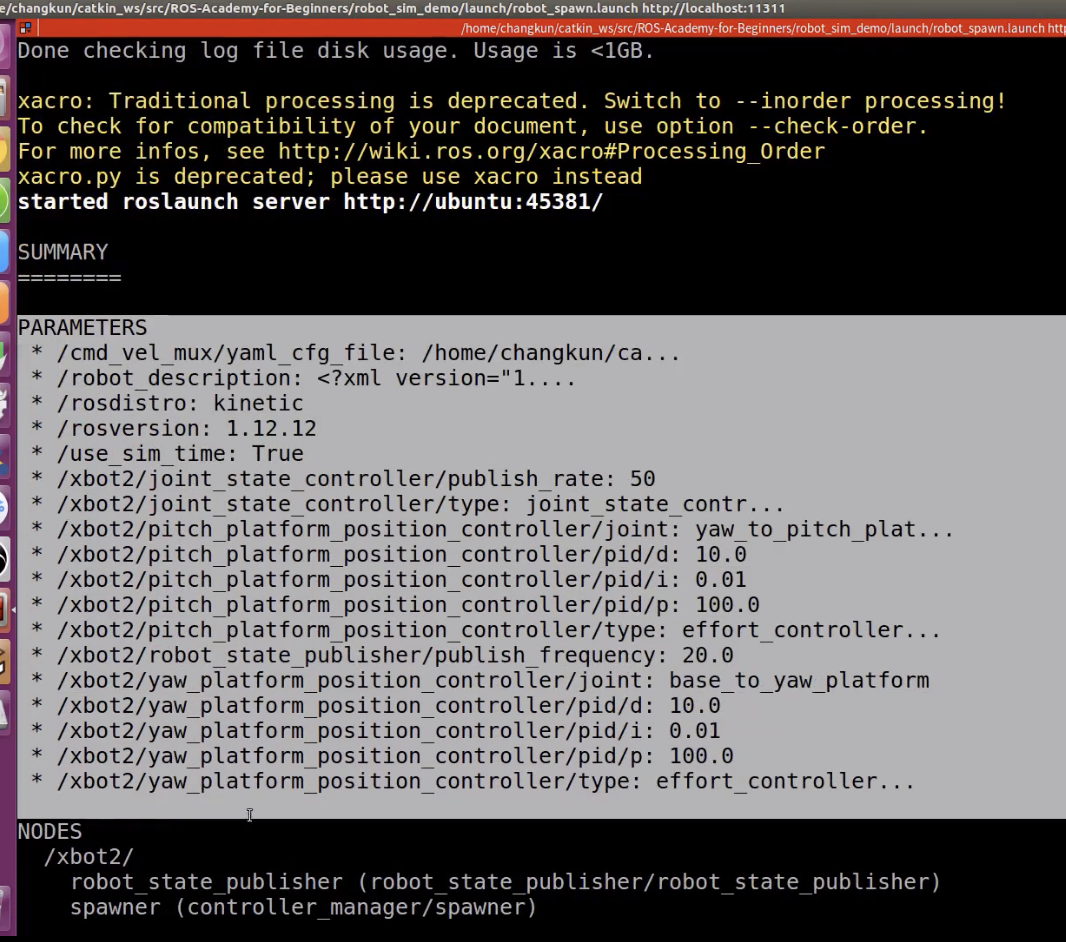
不了解一个进程的时候看下info
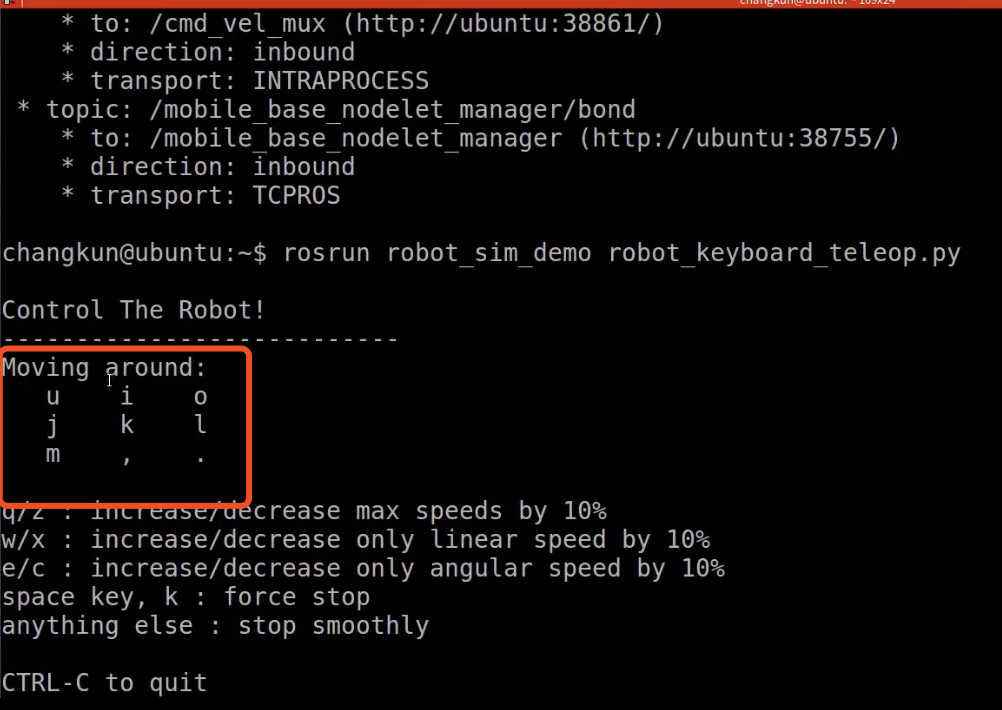
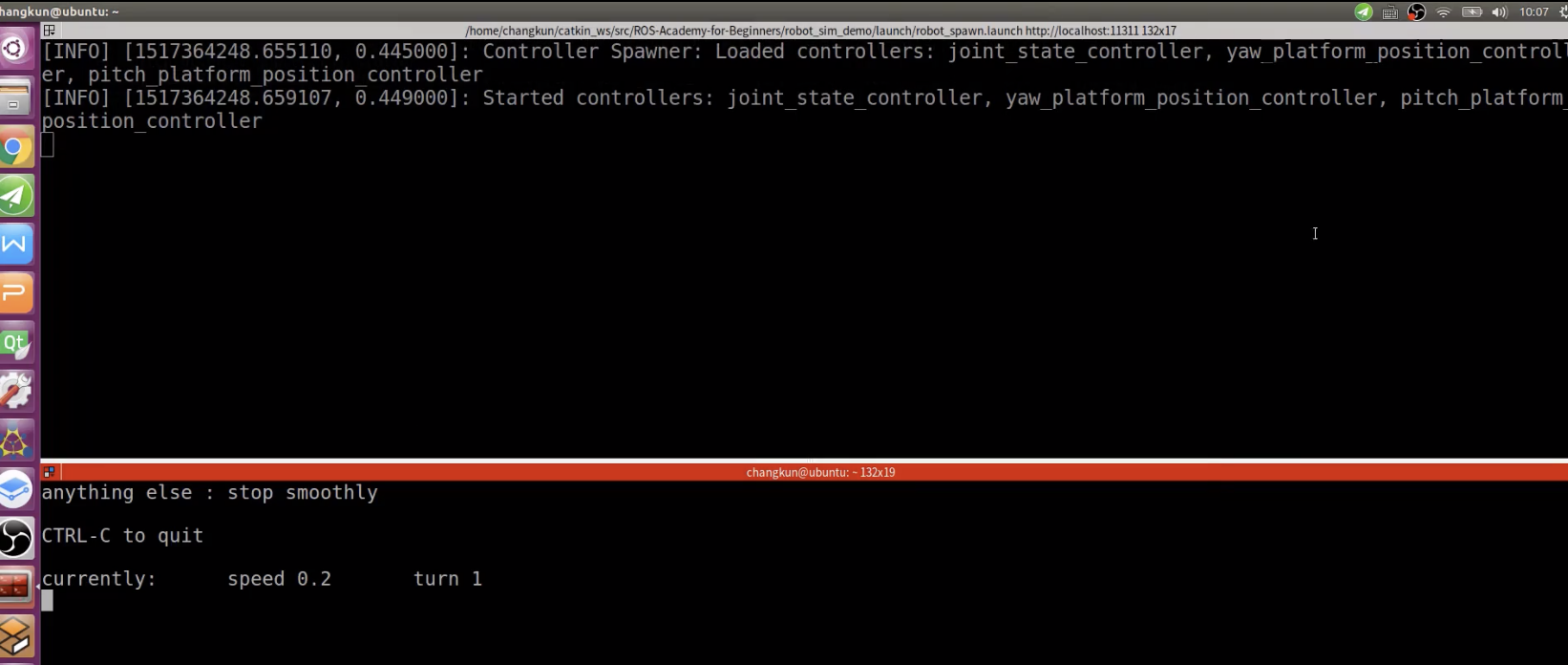
i head forward
j turn left
l turn right
k stop
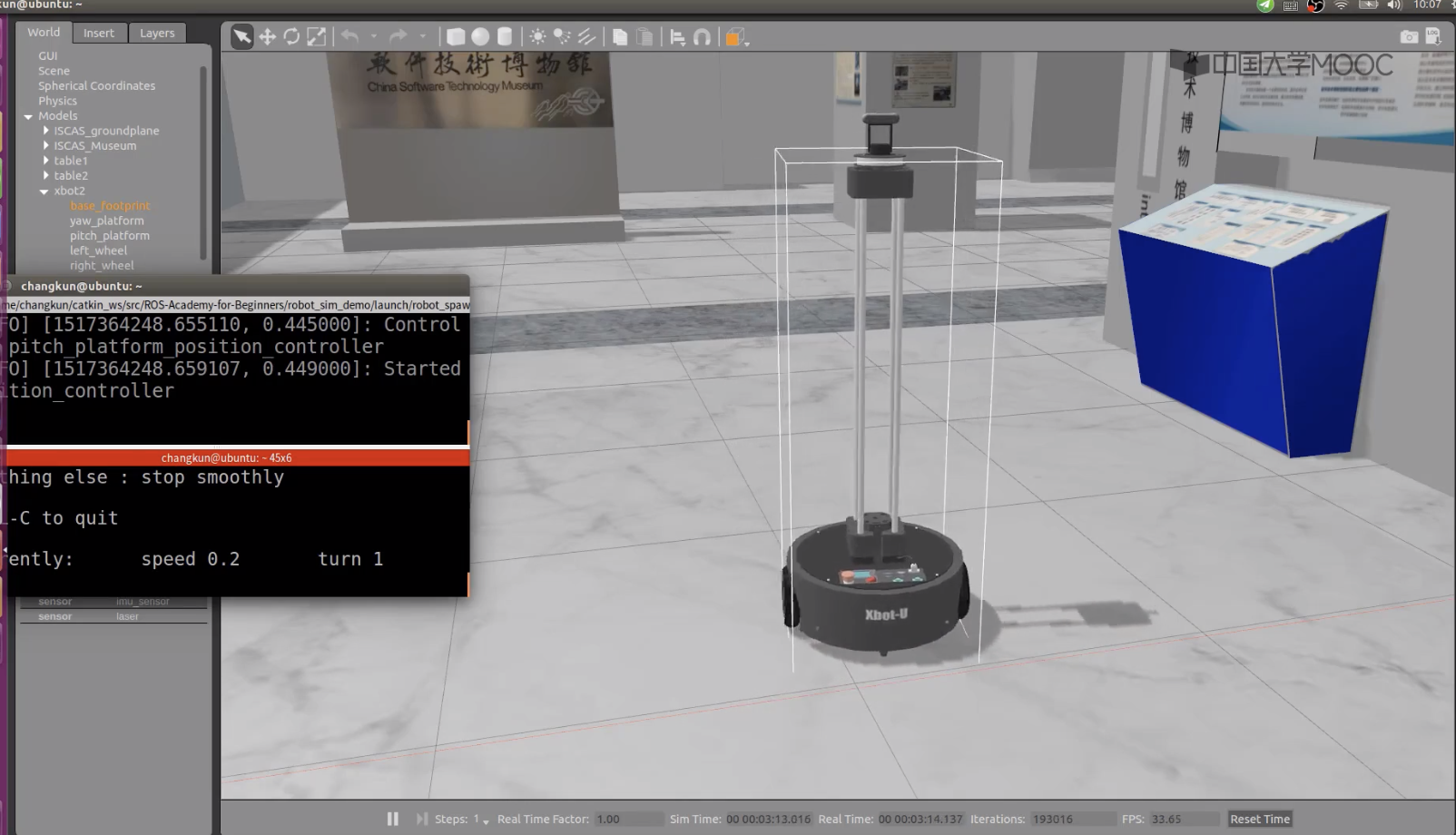
一个node控制键盘和gazebo通信
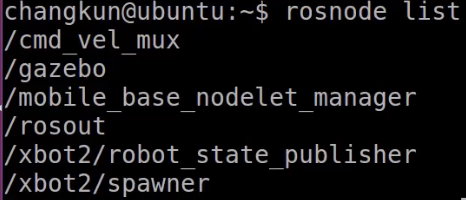
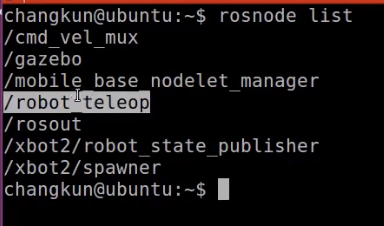
再次查看rosnode list
可以看到多了一个
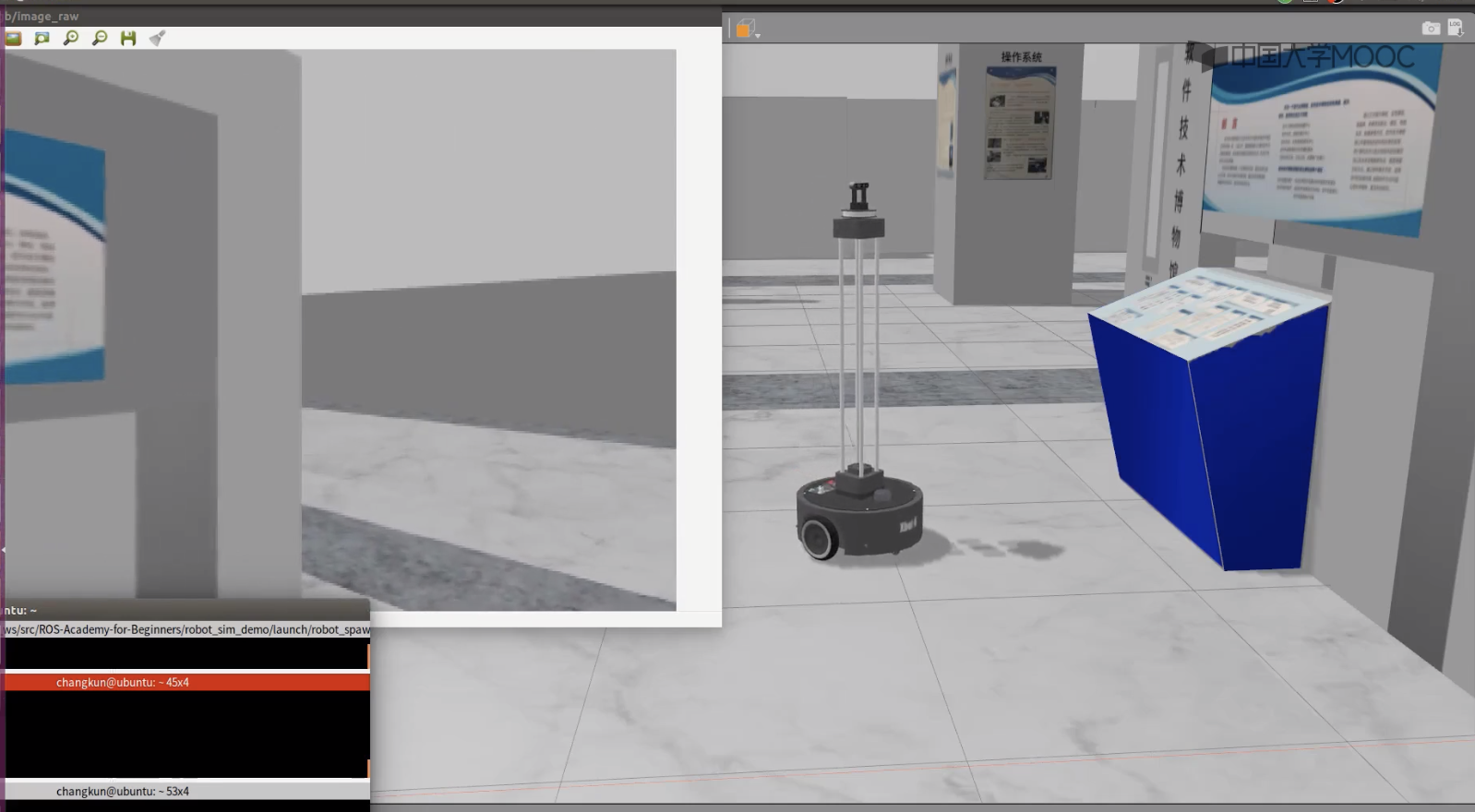
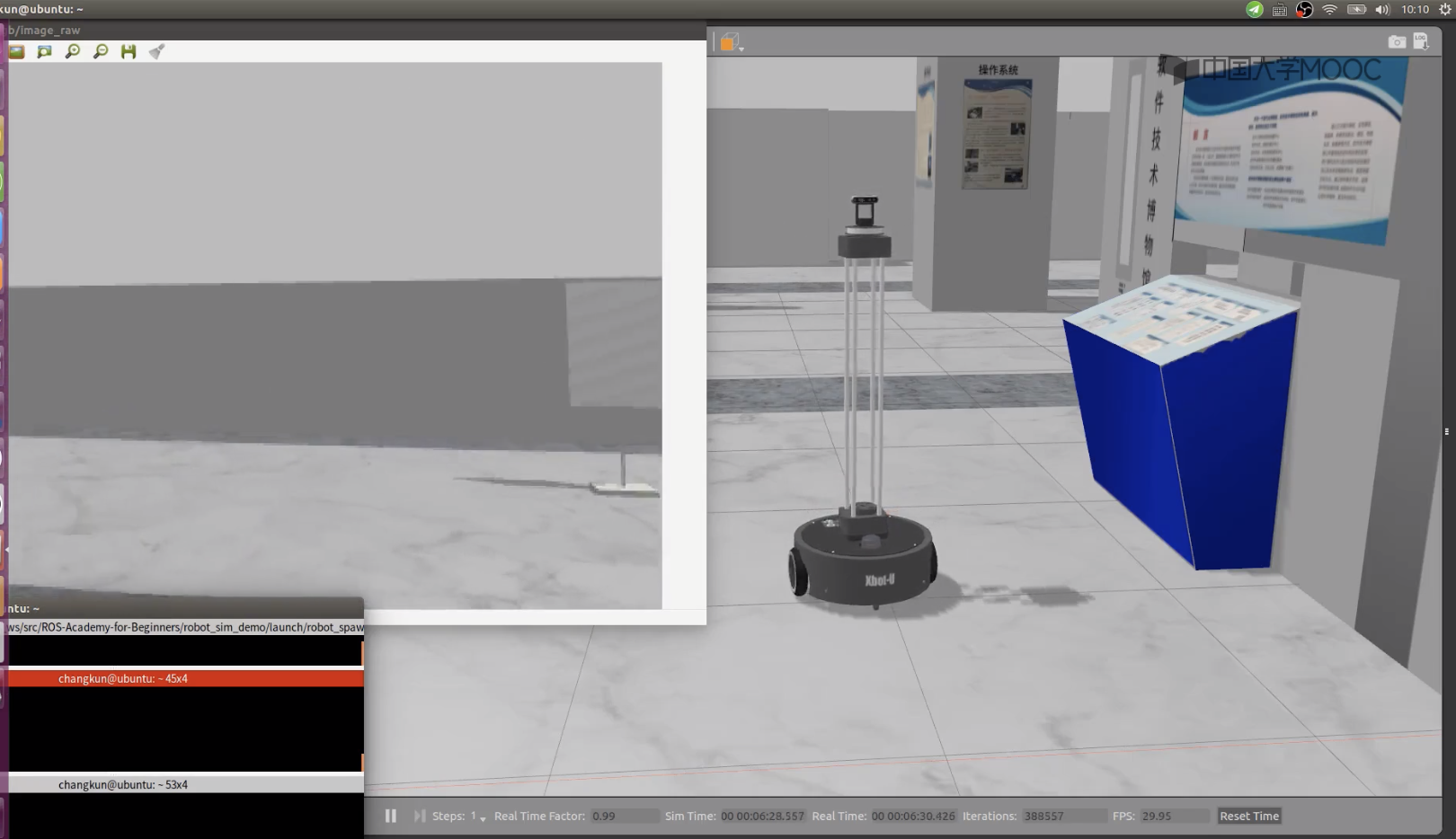
接下来打开摄像头: