

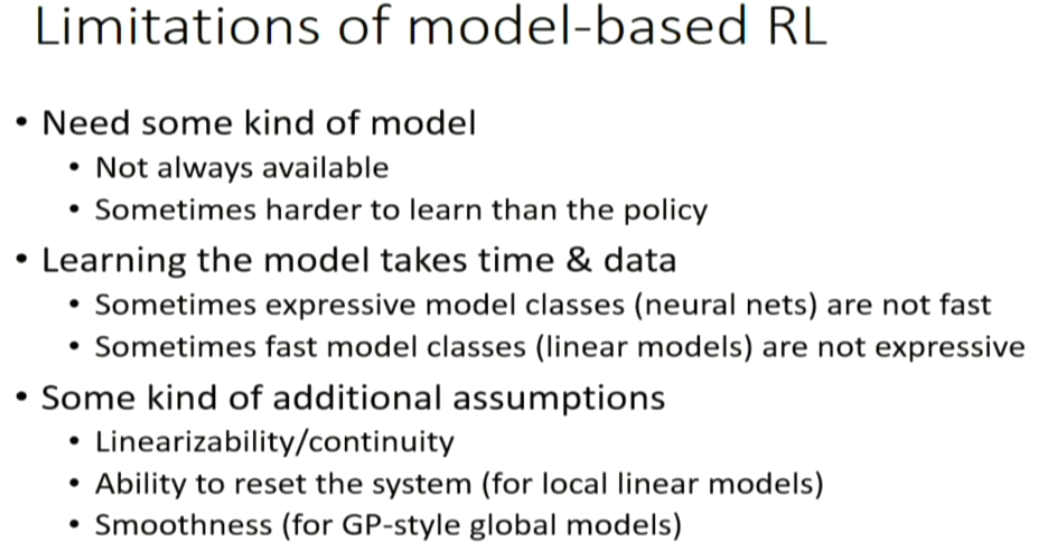
There are some problems: mismatch of model and reality; gradient explosion
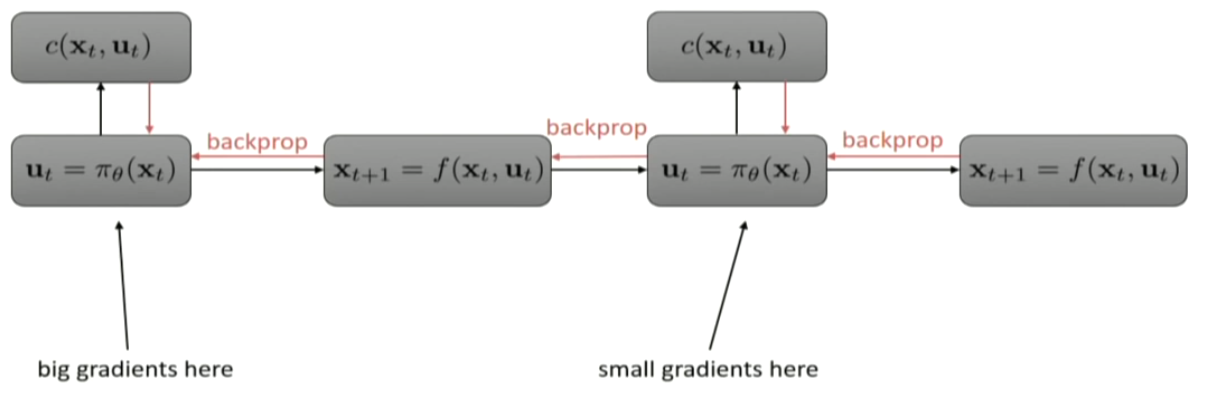
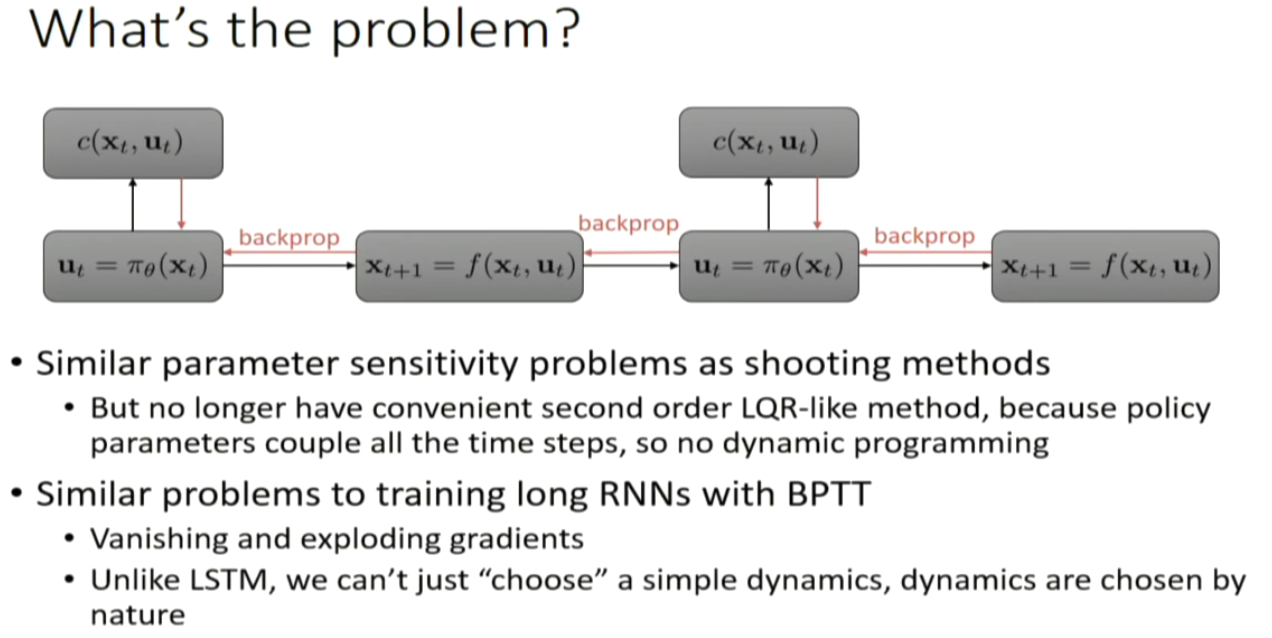
so, the dynamics can be quite messy, and backpropogating can be quite problematic.
sudden change in velocity and so on. schochastic system. gradient descent can be tough.
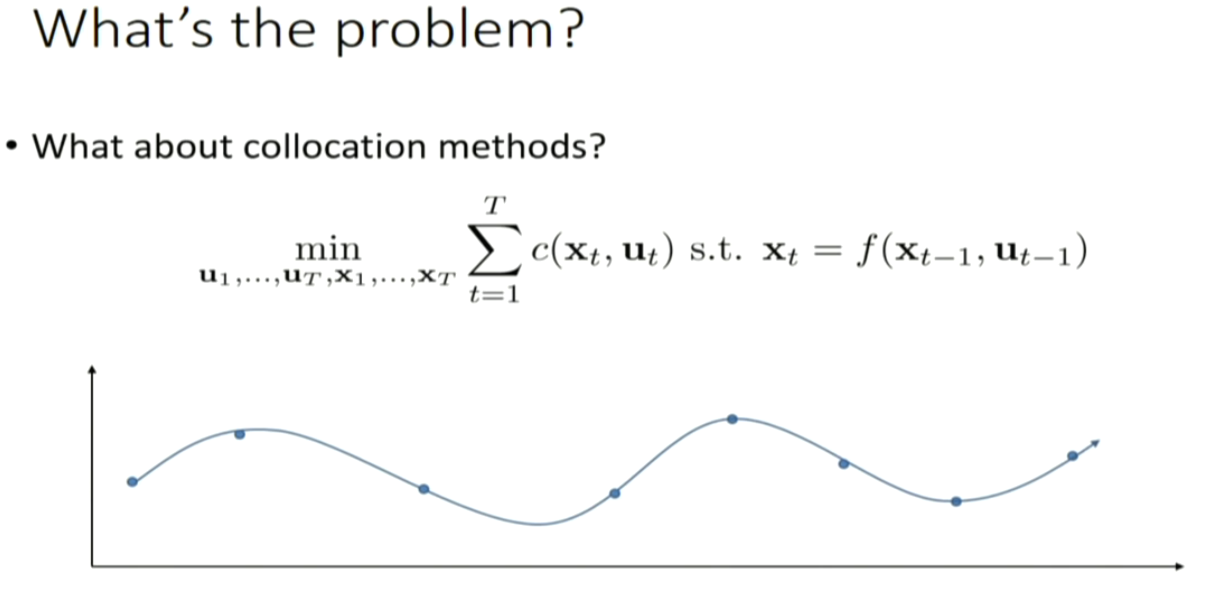
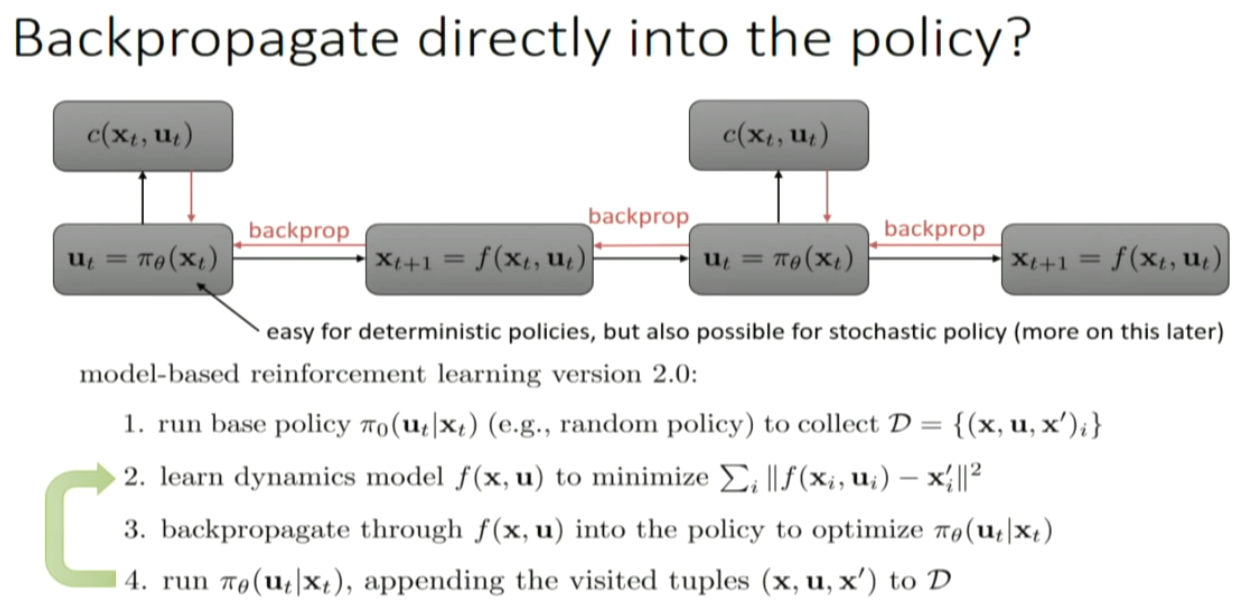
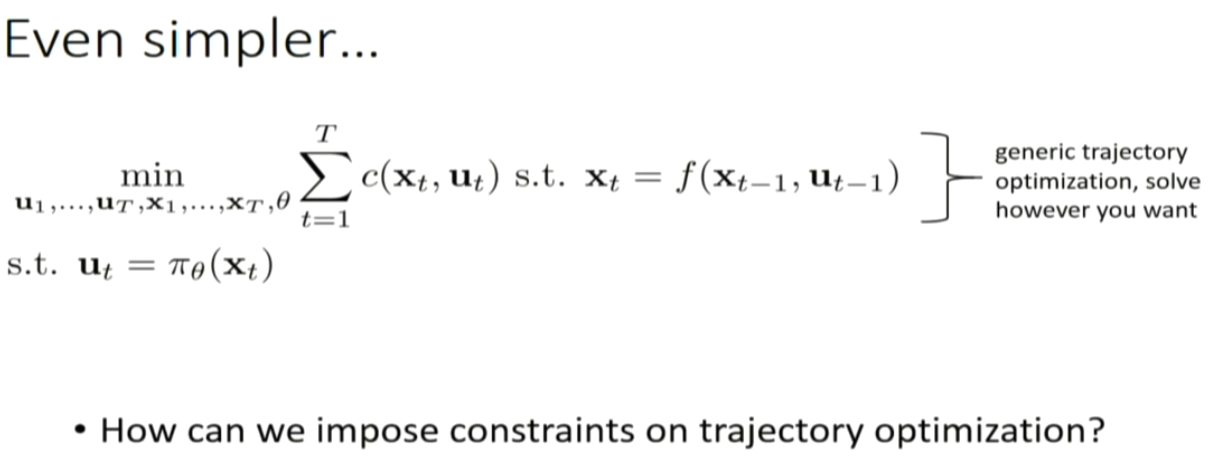
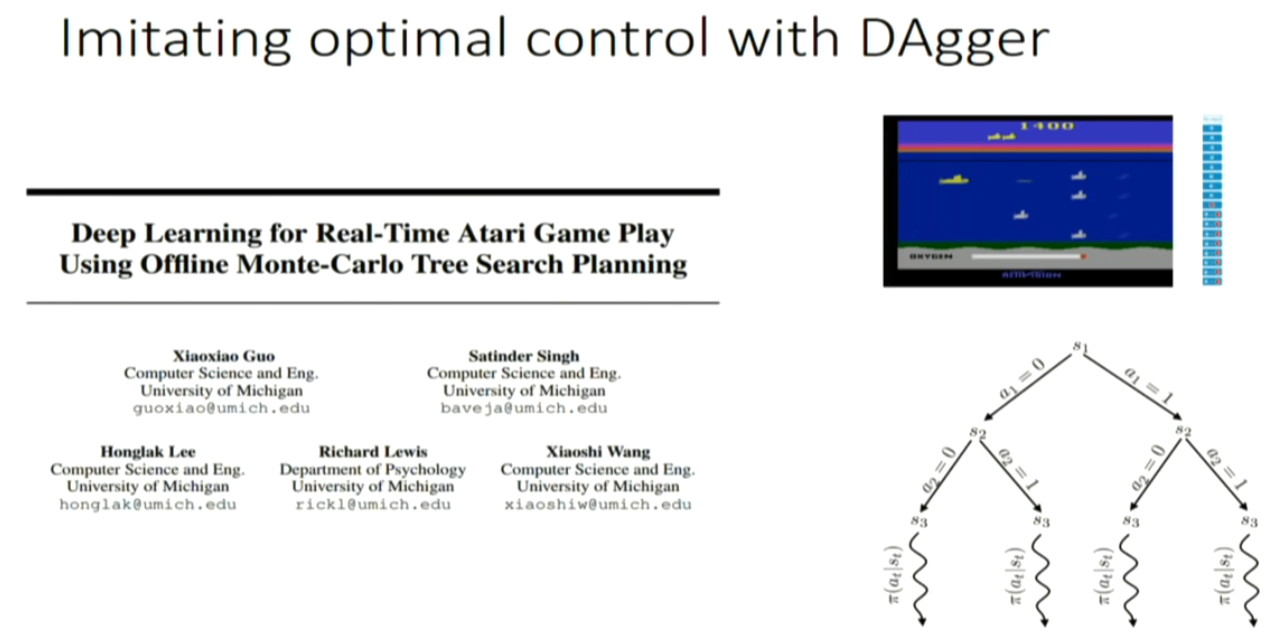
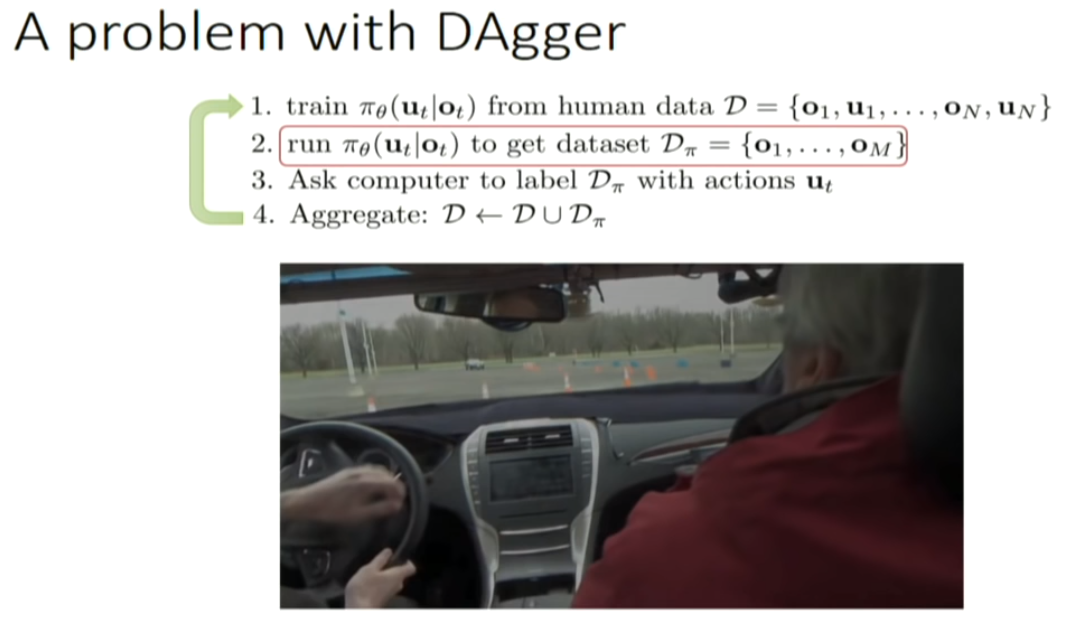
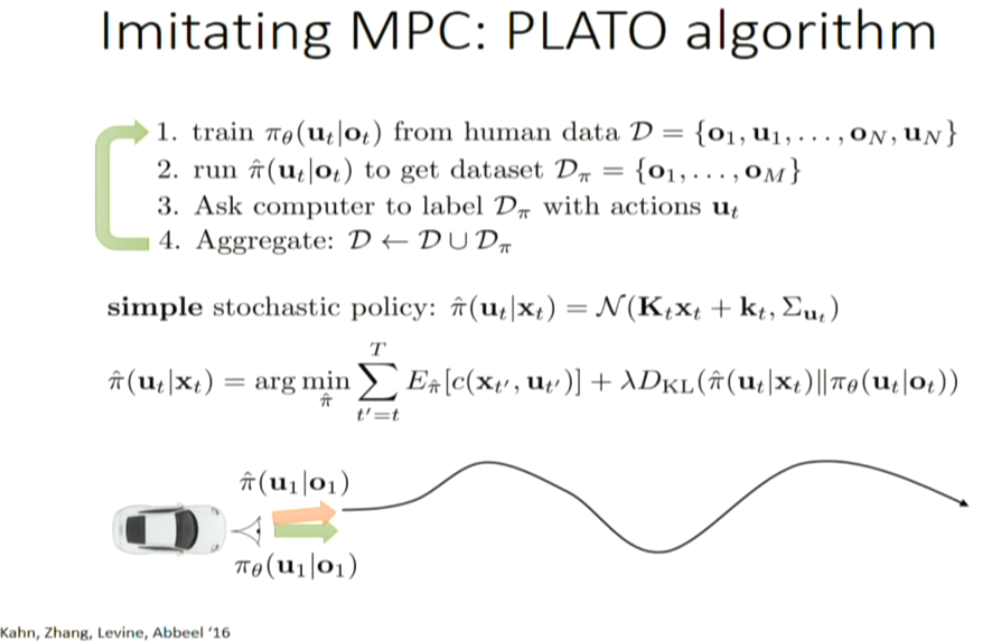
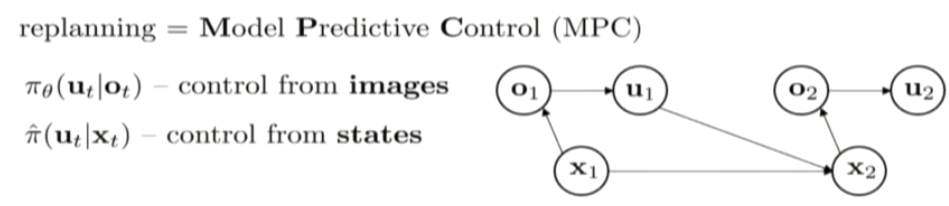
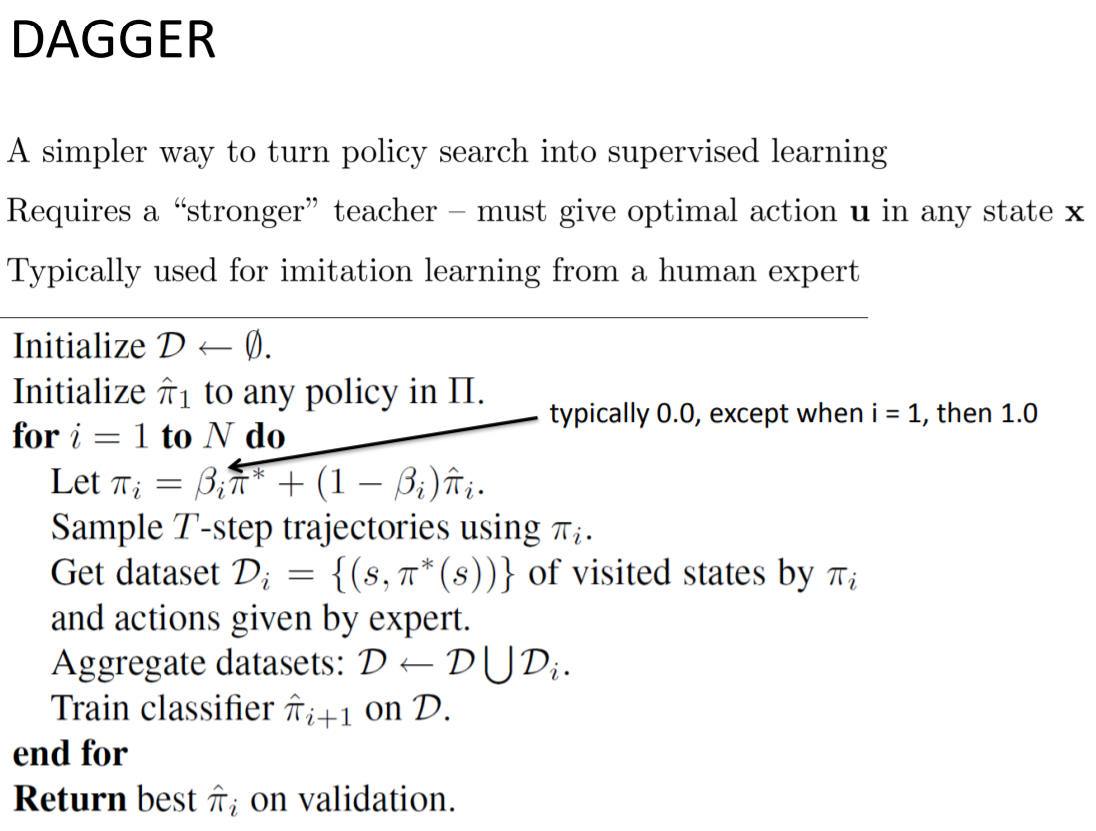
can we apply this trajectory optimization method to optimize policy?
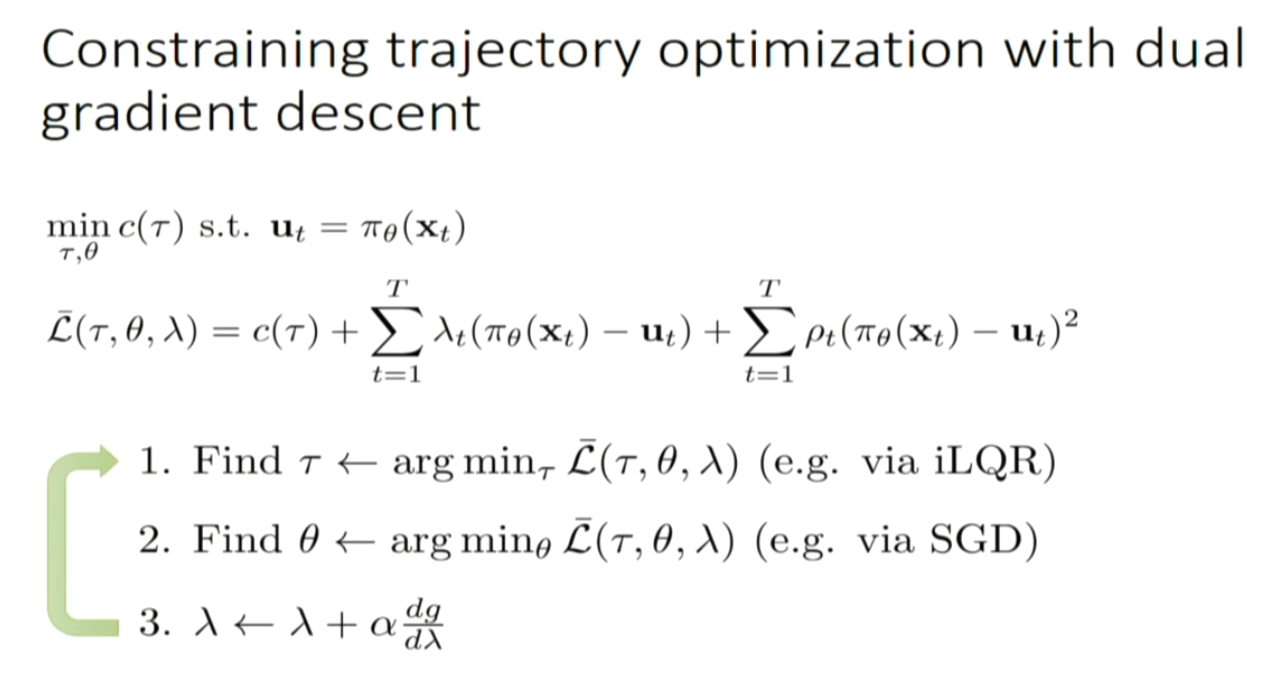
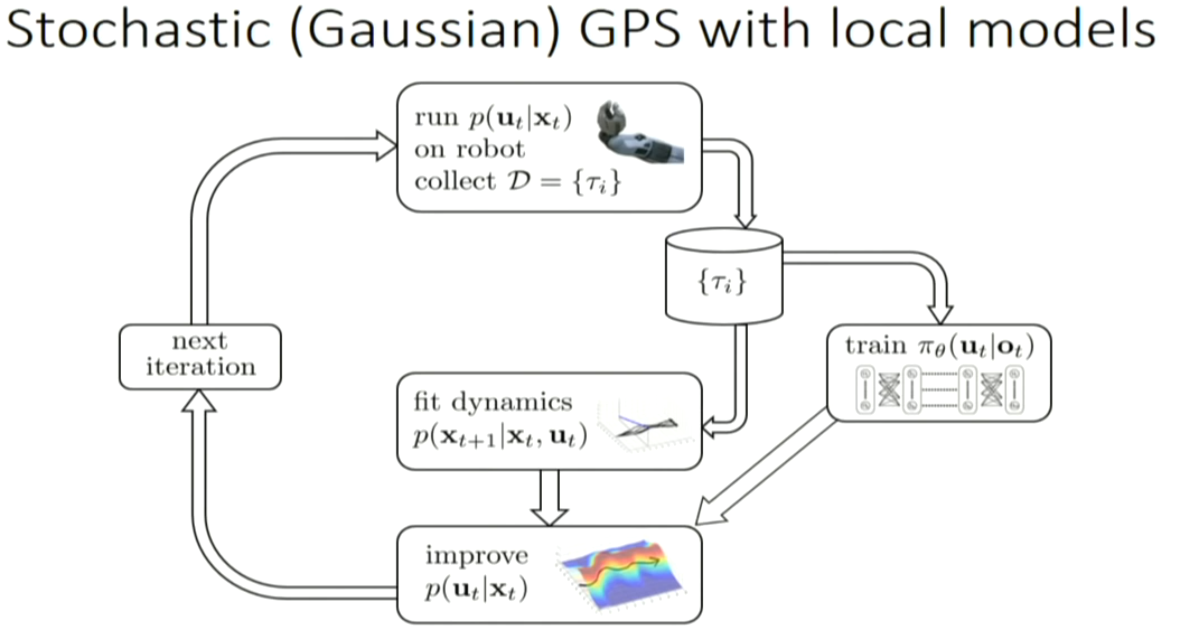
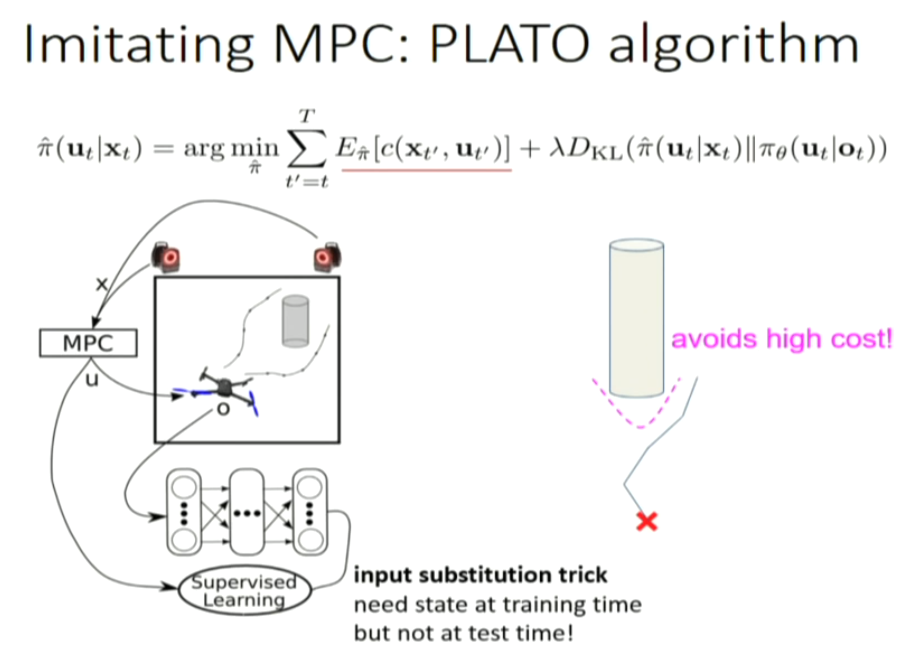
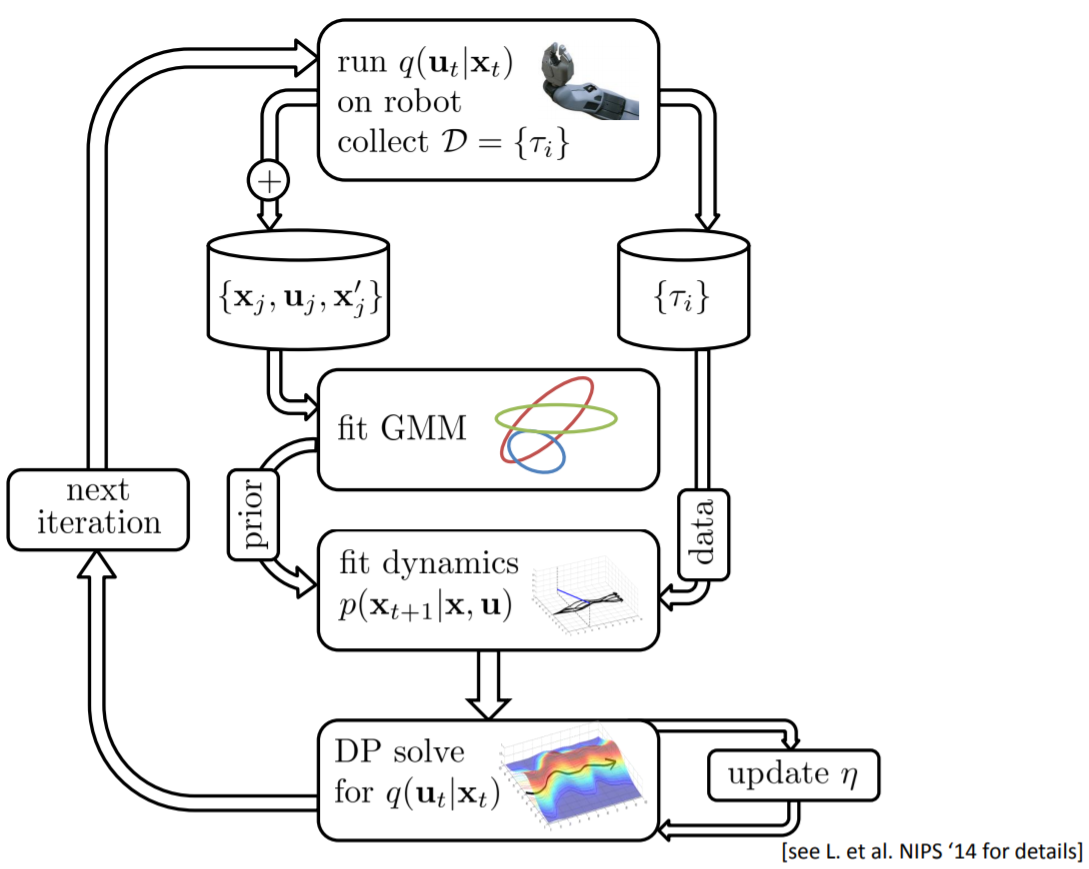
GPS: guided policy search
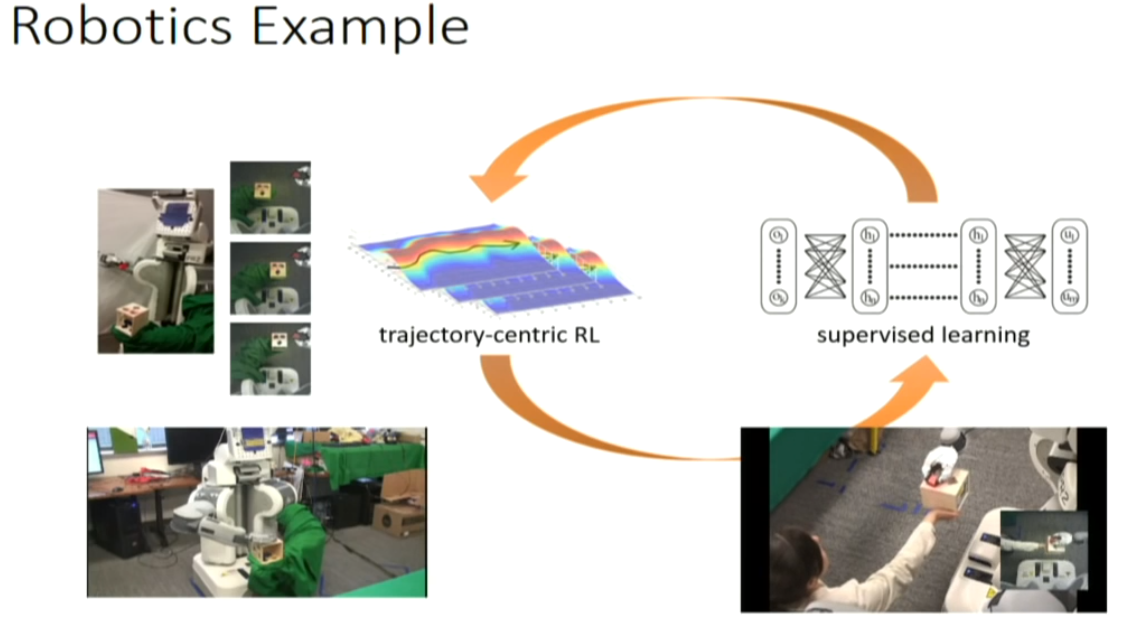
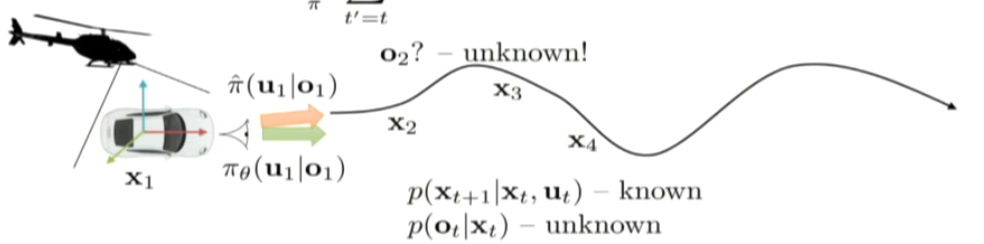
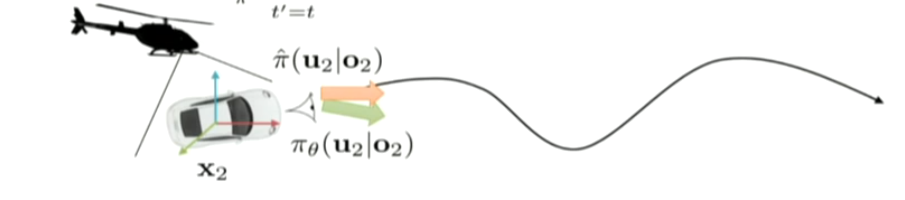
in this case, ot is from the camera and the joint velocity




https://katefvision.github.io/katefSlides/imitate_controlers_katef.pdf