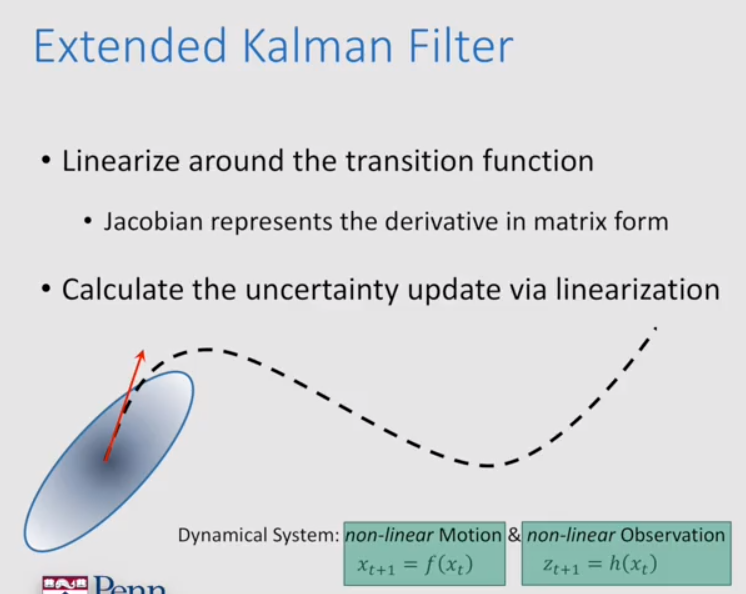



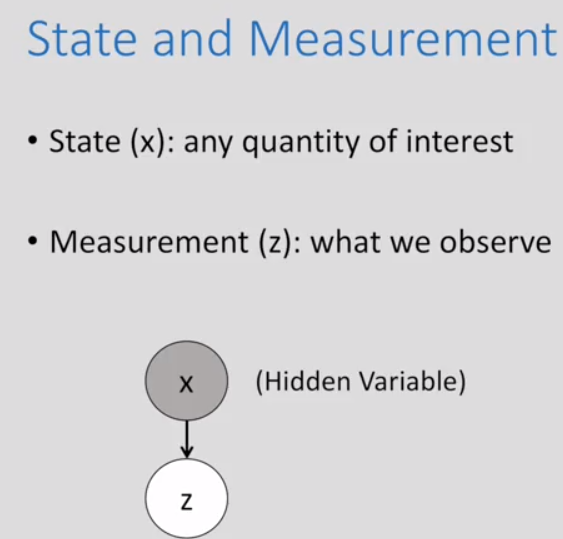

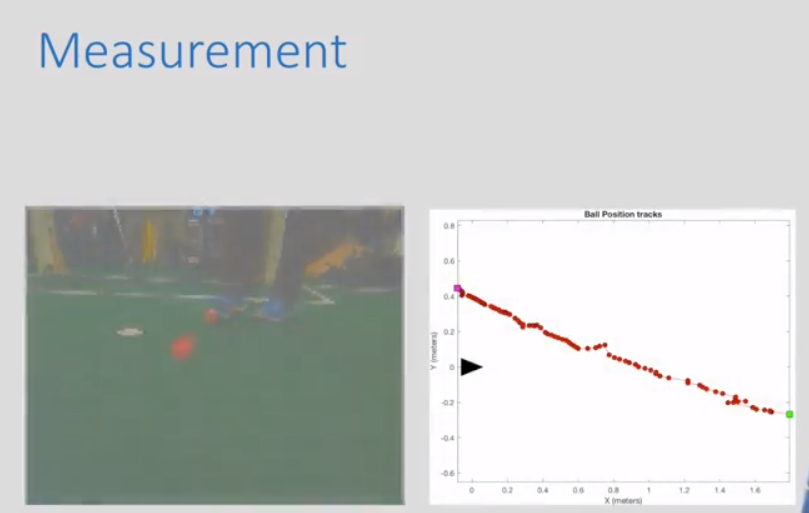

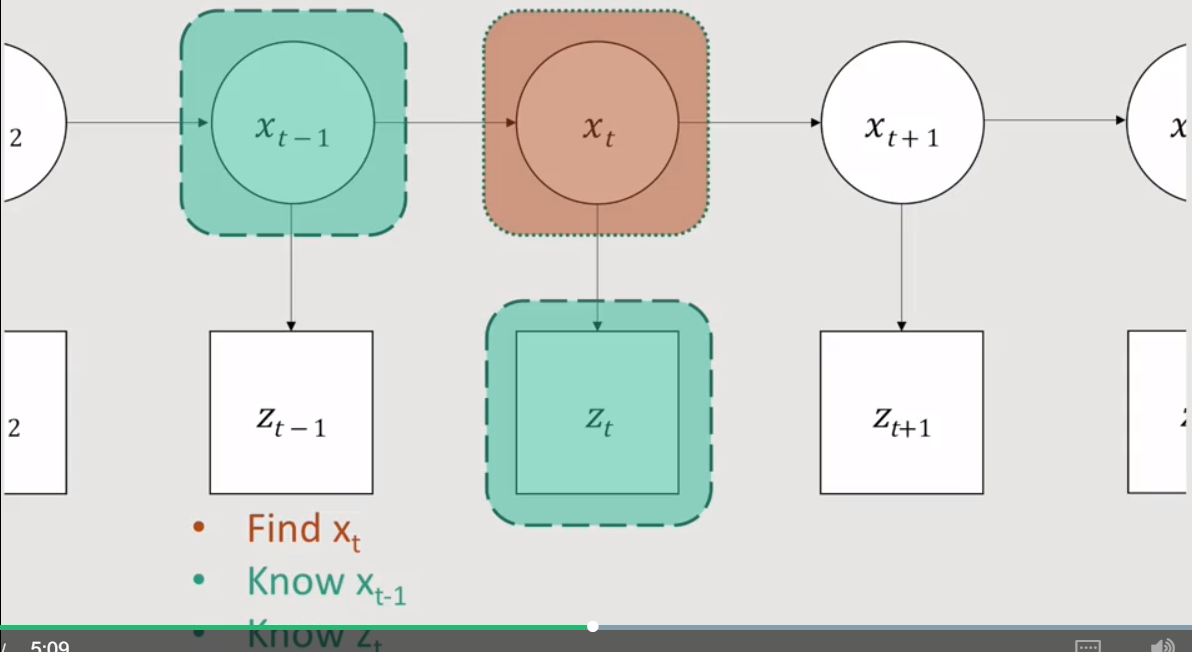
The robot will not directly measure X unfortunately, but
the robot may observe portions of x through it's sensors.
This portion is labeled z, where the relationship between the state and
measurement is given by the mixing matrix, c.
Creditly both X and Z contain noise even in this model.
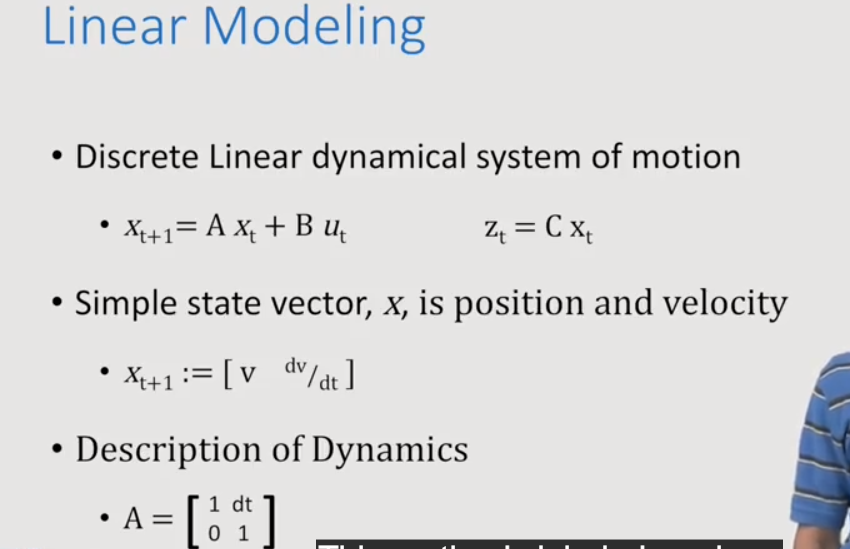
State X is noisy because the linear model does not capture all
physical interactions.
Observation Z are noisy because sensors contain noise in their measurements.



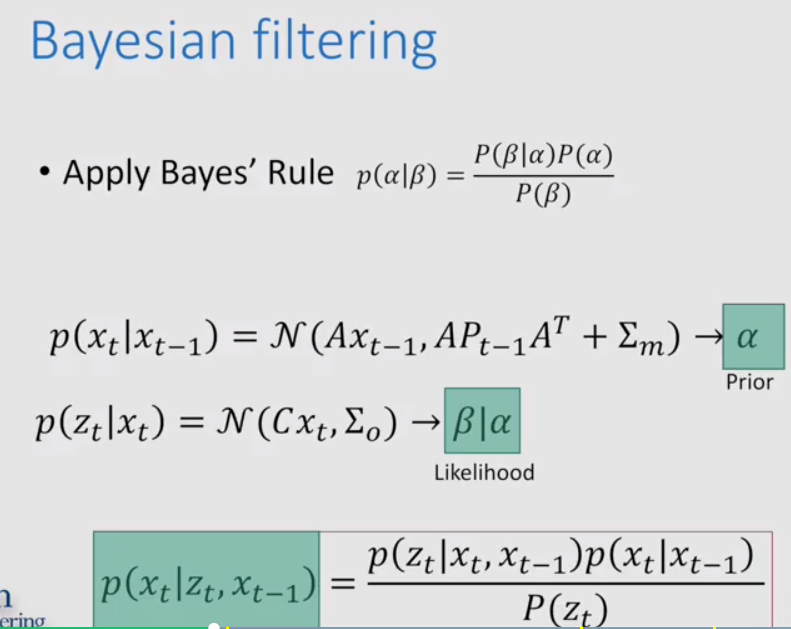
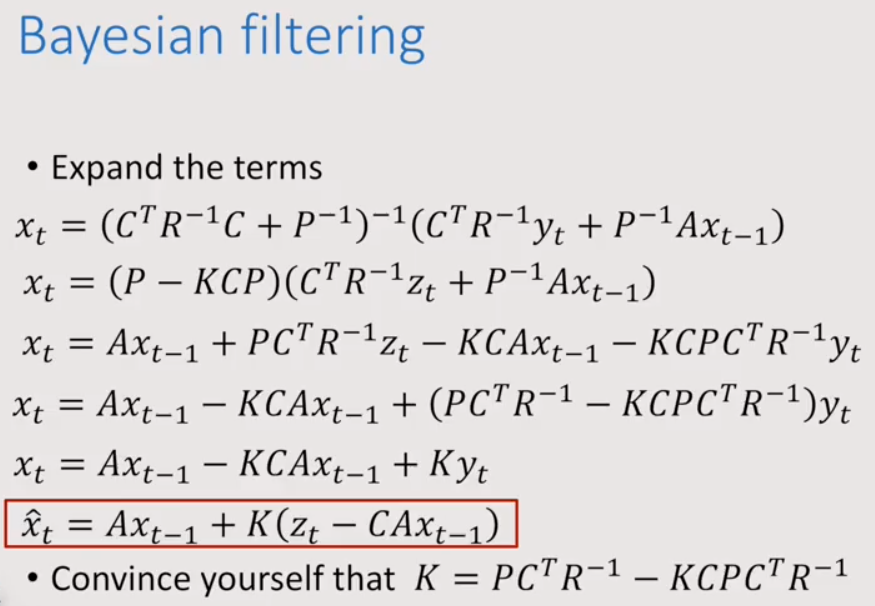
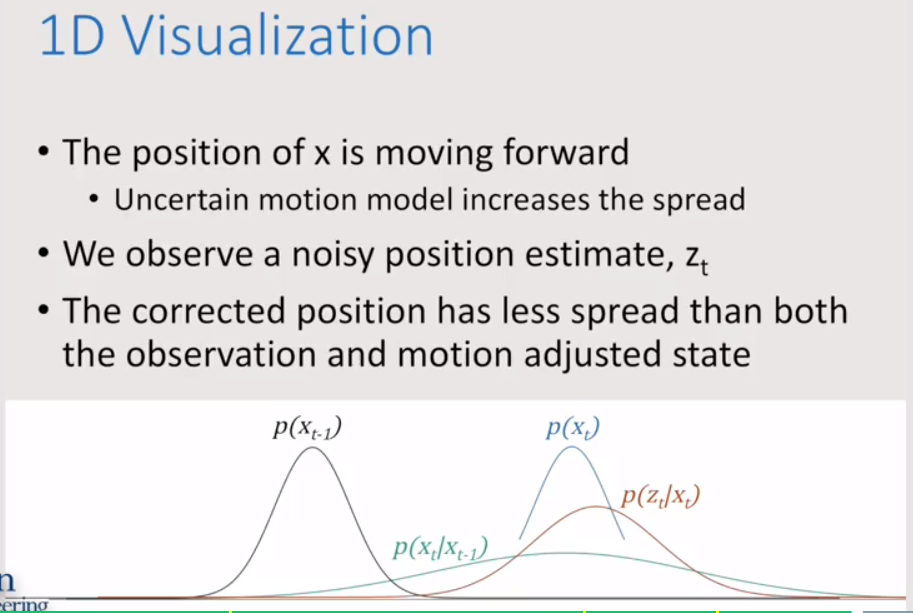
In the next section, we will show how these two probability distributions
can be fused to provide a better estimate of the true state.
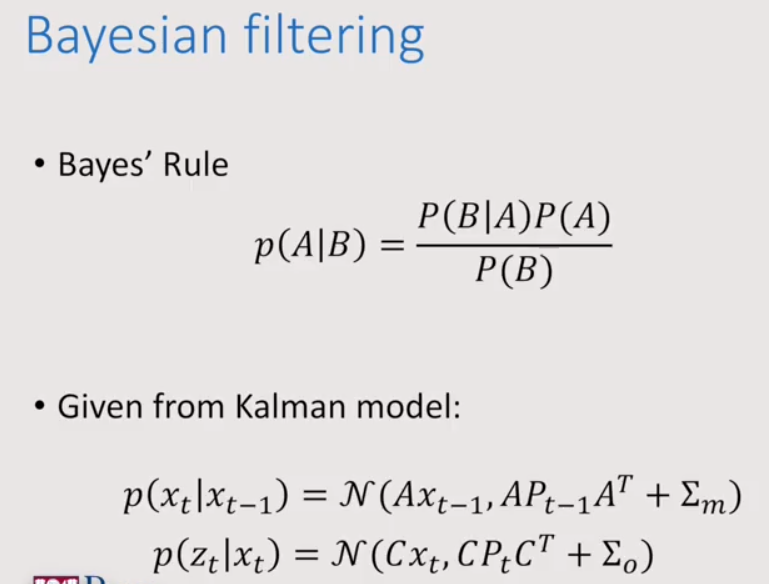
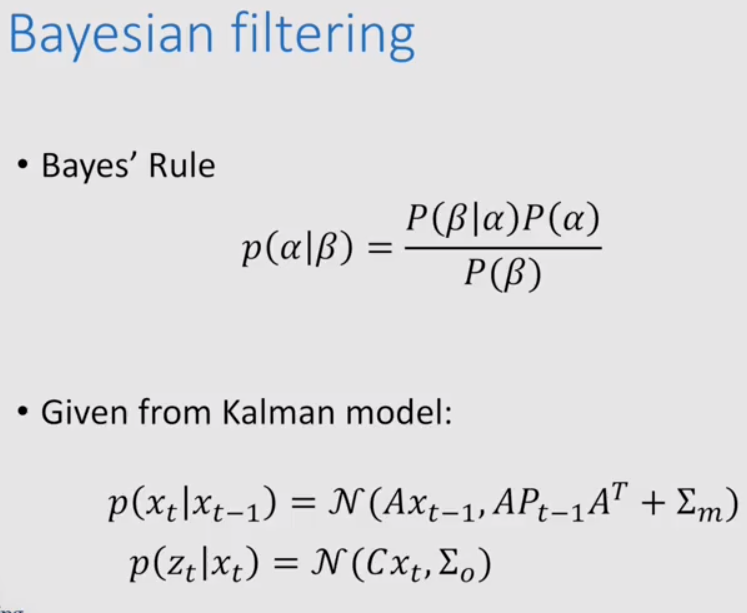
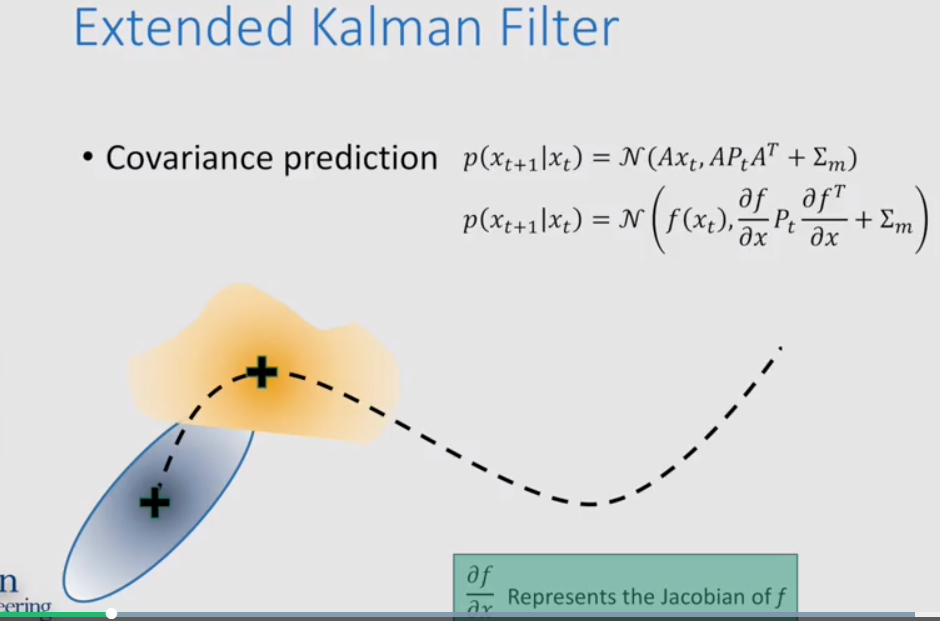
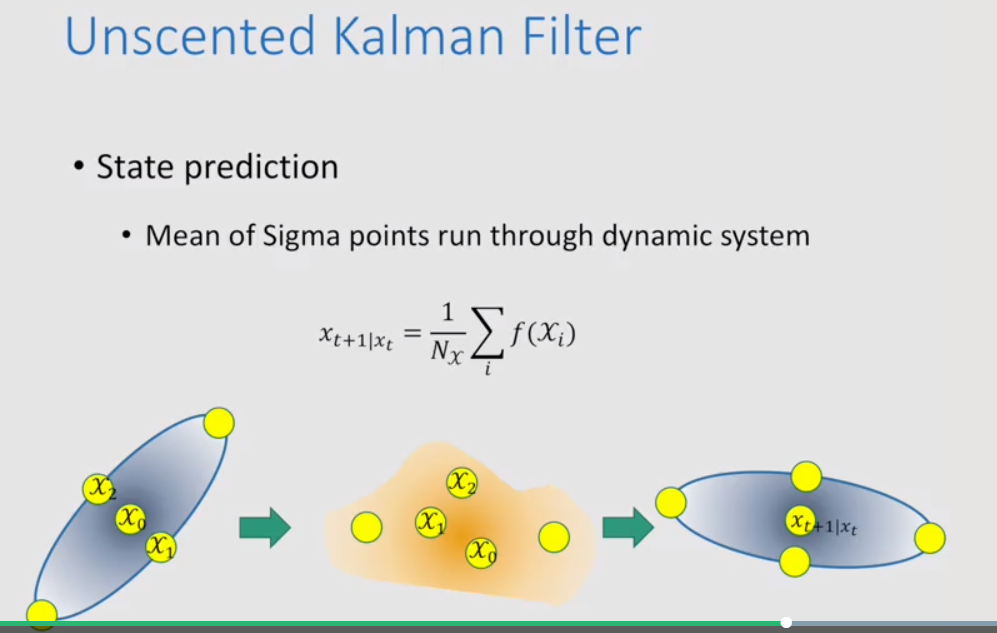
From the dynamical system, the probability of the state given only the previous
state can be represented with the prior information alpha.
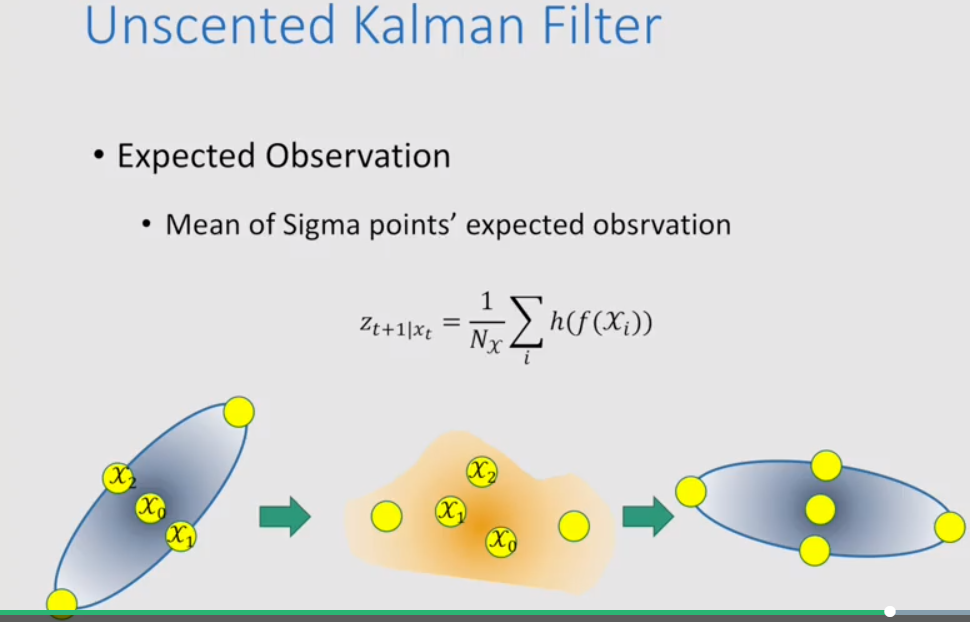
Representing the information from our measurement model,
beta provides observational evidence.