GPIO实验
一、实验原理
调用GPIO实现PS对引脚的控制
二、实验步骤
1、建立工程
这部分是ivado的操作内容,这里不做过多说明。
2、添加ZYNQ处理器IP
在左侧菜单栏中双击Create Block Design(bd为文件),在跳出的Diagram界面添加IP核processing_system7_0(点击中间的加号后输入zynq即可筛选出来)
3、配置IP核
勾选UART1用于调试,设置DDR用于下载,具体的配置方式根据相应的芯片做出设置。
4、添加两个GPIO与总线连接的IP核
AXI-GPIO核添加和内核添加类似,直接调用IP核的库就行。
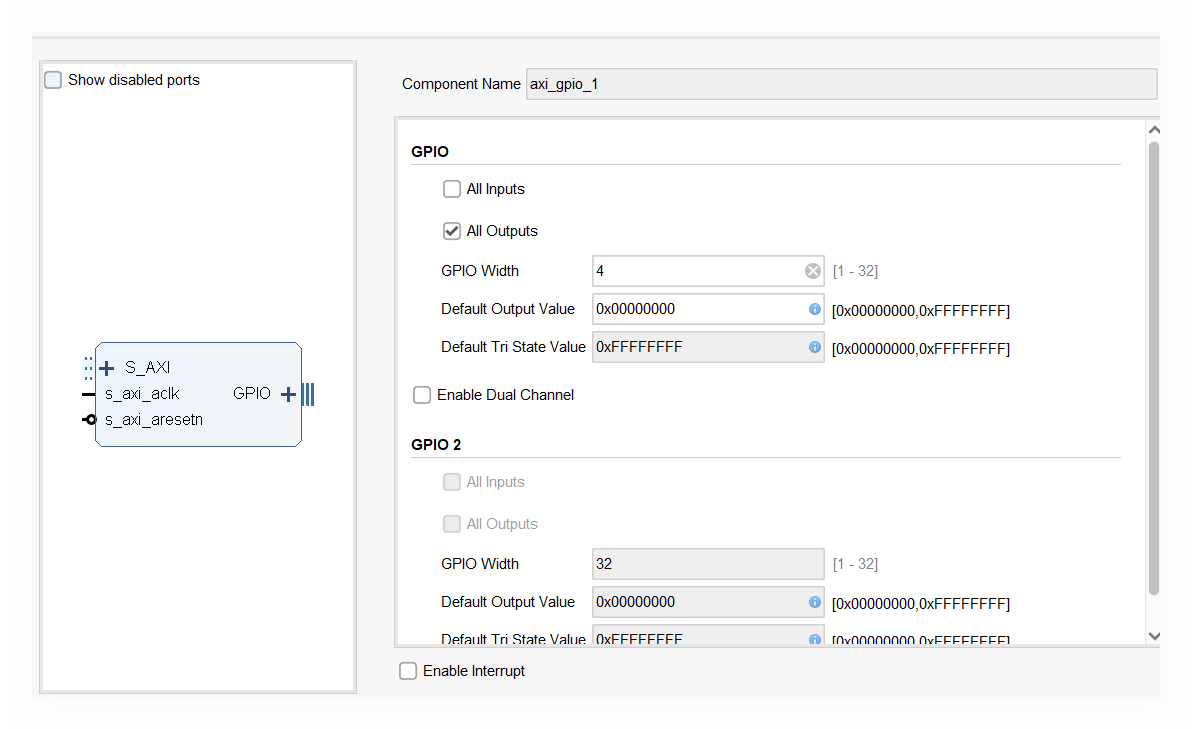
5、设置输入与输出的GPIO-AXI核类型
输入:
输出:
6、自动连接和自动
在Diagram框内出现Run Block Automation 和 Run Connection Automation两个选项,先后再前,依次执行,得到的效果图·:

7、生成例化
在资源界面顶层文件右击》generate Productor,默认生成即可。再右击选择Create HDL wrapped即可得到自动例化的文件。
8、配置引脚
双击open elaborated design,打开引脚管理器IO ports(2019的默认在右下角),根据原理图选择管脚。注意使用开发板的管教电压。
9、综合映射生成bit文件
这里本来有三个个步骤,但是可以合在一起执行。直接点击左下角的generate Bitstream即可得到bit文件。这里需要比较长的时间,需要耐心等待。映射也是需要做的。
这里说明一下bit文件的作用。
生成好的bit文件可以在file》export中输出hardware,生成的hardware可以使用sdk或者vitis平台读取,形成自定义的硬件平台。换言之,截至到这一步,所有的硬件设备已经调用完成,不能再添加硬件设计了。下面的都是基于软件的设计,不能修改硬件。所以这里需要检查所有的硬件设计是否达标。由于这里设计简单,就不做仿真了,使用过的全是IP核,具有保障。
成功的标志是生成xsa文件。
这里总是出现licence不支持的情况,如果使用是下载的licence的话,到licence管理器中刷新后重启软件好像可以解决,不确定。
10、vitis读取硬件
在2019之前的版本使用的是SDK,可以自动调用,新出的vitis好像不行,需要自己引用文件。
11、新建application project
在file》new 》application project中新建一个文件。
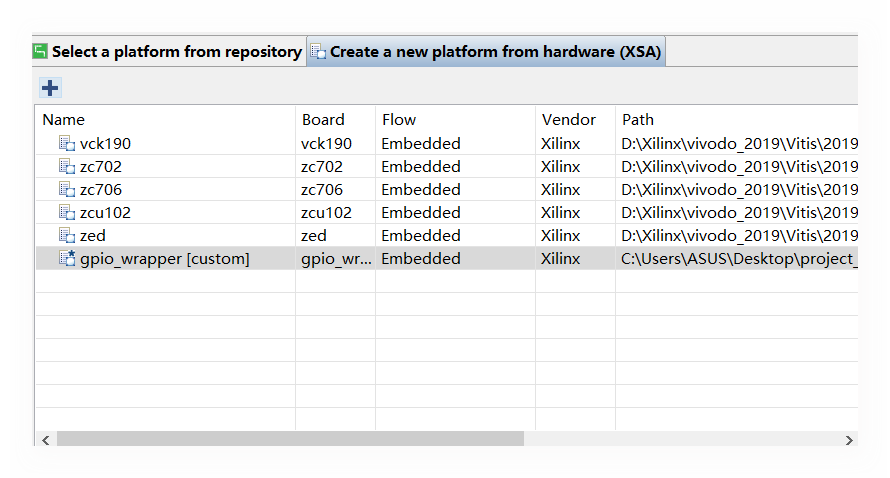
需要更改的设置就是platform
这里的选择Create a new platform from hardware,使用添加(加号)选择vivado生成的xsa文件(默认位于工程目录下,在生成的时候可以自己设置)
还有就是在不熟悉软件的架构之前可以使用hello word 模板,可以有效缩短时间。
12、编写代码
找到主文件(工程名.c),写入代码。
由于这部分不做代码设计的实验,就先找了一份代码作为测试:
#include <stdio.h> #include "platform.h" #include "xparameters.h" #include "xscugic.h" #include "xil_exception.h" #include "xgpio.h" #include <unistd.h> // usleep() #include <stdbool.h> // bool #define LED_DEVICE_ID XPAR_AXI_GPIO_1_DEVICE_ID #define KEY_DEVICE_ID XPAR_AXI_GPIO_0_DEVICE_ID XGpio LEDInst; XGpio KEYInst; u8 key_value_pre=0; u8 key_value_now=0; int main() { init_platform(); int status; status = XGpio_Initialize(&KEYInst, KEY_DEVICE_ID); // initial KEY if(status != XST_SUCCESS) return XST_FAILURE; status = XGpio_Initialize(&LEDInst, LED_DEVICE_ID); // initial LED if(status != XST_SUCCESS)return XST_FAILURE; XGpio_SetDataDirection(&KEYInst, 1, 1); // set KEY IO direction as in XGpio_SetDataDirection(&LEDInst, 1, 0); // set LED IO direction as out XGpio_DiscreteWrite(&LEDInst, 1, 0x0);// at initial, all LED turn off printf(">>> Press PL KEY1 ~ KEY4 one by one, and check the PL LED1 ~ LED4 "); while(1) { usleep(100000); // 0.1s sleep, to debounce, in common, the meta-state will sustain no more than 20ms key_value_pre=key_value_now; key_value_now= XGpio_DiscreteRead(&KEYInst, 1) & 0x0F; XGpio_DiscreteWrite(&LEDInst, 1, key_value_now); if(key_value_pre!=key_value_now) printf("key state_changed! "); } cleanup_platform(); return 0; }
注:以上代码源自小熊猫学堂
13、调试代码
首先要搭建该工程的调试环境,使用小锤子图标可以实现。
先debug编译,再运行。编译时选择板上编译。这两个操作就是对应调试虫和开始键,接触过的人就应该知道。由于这个设计中加入了串口,所以还要加入端口,端口设置就不用多说了,做过串口实验的就会。根据这个可以得到调试的结果。如果要下载的话则调用flash即可。
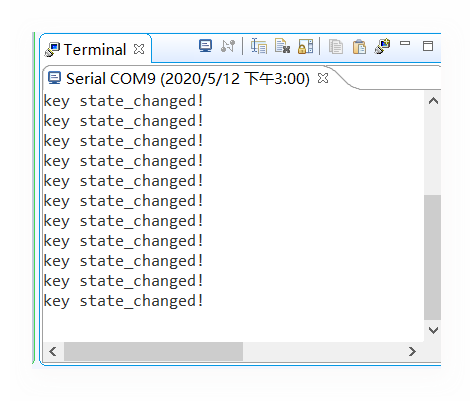
三、实验结果
串口显示结果:
开发板显示结果: