论文源址:https://pjreddie.com/media/files/papers/YOLOv3.pdf
代码:https://github.com/qqwweee/keras-yolo3
摘要
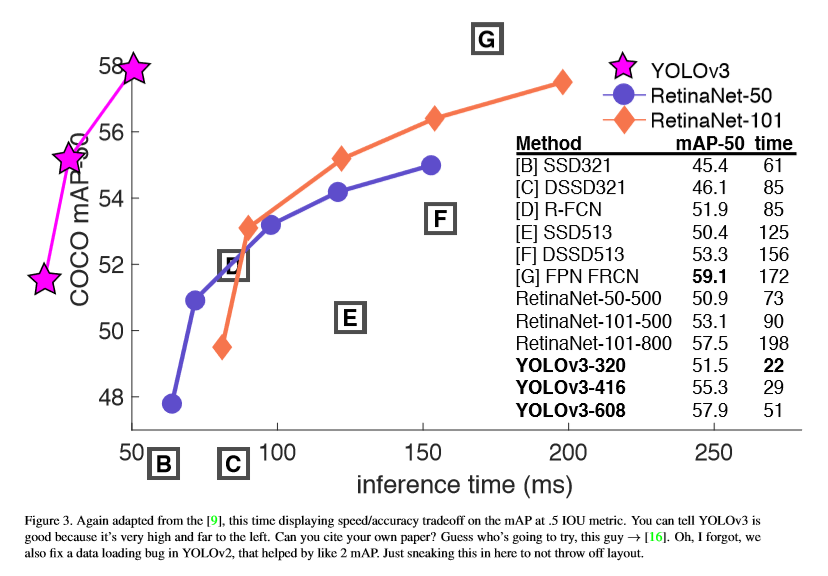
本文针对YOLO再次改进,训练更大的网络,准确率也有所提高。在320x320的输入上YOLOv3运行22ms,mAP为28.2,与SSD的准确率相同,但比SSD快三倍。在使用0.5 IOU作为检测机制时,YOLOv3仍表现很好。在Titan X上实现57.9 AP50 51ms的运行,而RetinamNet为57.5 AP50运行198ms,YOLOv3要快3.8倍。
The Deal
bounding box 的预测:沿袭YOLO9000的方式,仍采用维度聚合的方式。网络预测每个bounding box的四个坐标,tx,ty,tw,th。如果单元格偏离图像左上角(cx,cy),而且先验框的宽和高为pw,ph,这预测的值为:

训练时,选择平方误差损失的和,预测坐标对应的真值为 ,梯度计算是真值减去预测值,
,梯度计算是真值减去预测值, 通过翻转上述式子,可以得到真值的值。YOLOv3通过使用逻辑回归预测每个bounding box的目标分数。如果一个先验框与ground truth 的重合率要比其他先验框都要多,则该框的目标分数应为1.对于与ground truth中目标有重叠超过阈值(本为设置为0.5),但不是最好的先验框,将此预测进行移除。如果一个先验框没有一个ground truth与之匹配。则没有类别和坐标的预测损失。只有是否存在目标的损失描述。
通过翻转上述式子,可以得到真值的值。YOLOv3通过使用逻辑回归预测每个bounding box的目标分数。如果一个先验框与ground truth 的重合率要比其他先验框都要多,则该框的目标分数应为1.对于与ground truth中目标有重叠超过阈值(本为设置为0.5),但不是最好的先验框,将此预测进行移除。如果一个先验框没有一个ground truth与之匹配。则没有类别和坐标的预测损失。只有是否存在目标的损失描述。

类别预测:使用多类别的分类器对每个框内可能包含的类别进行预测分类。YOLOv3并未使用softmax,只是使用独立的逻辑回归分类器。训练时,采用二元交叉熵损失进行类别的预测。当面向更复杂的情况时(开放的数据集,此数据集中存在大量重叠的标签),此方法会有所帮助,而使用softmax基于每个box只包含一个类别的假设,并不实用,而使用多标记的方法可以更好的描述数据。
不同尺寸的预测: YOLOv3预测三种不同的尺寸。YOLOv3采用类似于FPN网络类似的结构提取多尺寸特征。在基础的特征提取层后添加了基层卷积层。最后预测了一个三维张量,编码bounding box,objectness和类别的预测。COCO中每种尺寸预测三个框,因此张量为NXNX[3*(4+1+80)],分别代表4个坐标,1个objectness及80个类别的预测。取前两层的feature map将其上采样扩大至2倍,然后将采样后的feature map与更靠前的feature map进行拼接。通过上采样可以获得更多的语义信息,提取靠前层的feature map可以获得图像的细节信息。最后,添加一些卷积层来处理拼接后的feature map,并对此张量进行预测,当前的尺寸扩大。重复此方法,对最后一种尺寸进行预测。第三种储存预测的结果结合了先前的计算(相当于微调后的feature map)。
仍采用k-means剧烈确定先验框,任意选择9个簇及3种尺寸。在COCO数据集上得到的9个先验框为(10×13),(16×30),(33×23),(30×61),(62×45),(59× 119),(116×90),(156×198),(373×326).
特征提取:使用全新的网络进行特征提取。基于YOLOv2的网络将,Darknet19与残差结构进行结合。包含一系列的3x3与1x1的卷积夹杂着残差连接,网络规模变大,叫做Darknet-53。
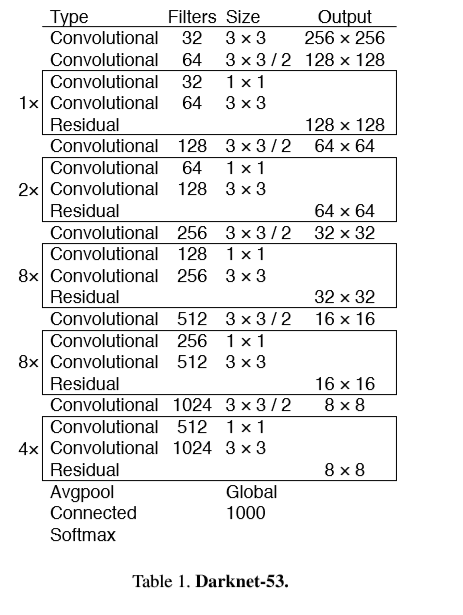
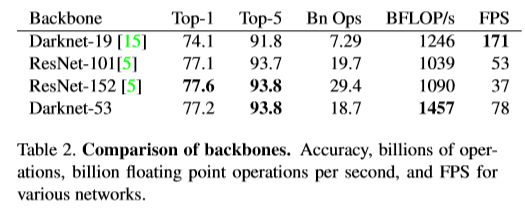
Darknet-53比Darknet-19高效,同时,比resnet-101,resnet-152更快。比较结果如下。
实验比较

实验失效的方案:
(1)Anchor box x,y offset predictions
(2)Linear x,y predictions instead of logistic.
(3)Focal loss.
(4)DualIOUthresholdsandtruthassignment.
Reference
[1] Analogy. Wikipedia, Mar 2018. 1
[2] M. Everingham, L. Van Gool, C. K. Williams, J. Winn, and A. Zisserman. The pascal visual object classes (voc) challenge. International journal of computer vision, 88(2):303– 338, 2010. 6
[3] C.-Y. Fu, W. Liu, A. Ranga, A. Tyagi, and A. C. Berg. Dssd: Deconvolutional single shot detector. arXiv preprint arXiv:1701.06659, 2017. 3
[4] D. Gordon, A. Kembhavi, M. Rastegari, J. Redmon, D. Fox, andA.Farhadi. Iqa: Visualquestionansweringininteractive environments. arXiv preprint arXiv:1712.03316, 2017. 1