自从开源了我们自己开发的Modbus协议栈之后,有很多朋友建议我针对性的做几个示例。所以我们就基于平时我们的应用整理了几个简单但可以说明基本的应用方法的示例,这一篇中我们来使用协议栈实现Modbus ASCII主站应用。
1、何为ASCII主站
我们知道Modbus协议是一个主从协议,所以就存在主站和从站之分。所谓主站,简单来说就是能够主动发起通讯的站点,所以我们可以说主站就是发起通讯的一方。
对于ASCII主站来说,它的数据需要从从站获取,所以主站要通过通讯的方式与从站实现数据交流。在Modbus ASCII协议中从站不会主动向外发送数据,所以只有在ASCII主站发送数据请求,从站才会向其返回请求的数据。这一过程如下图所示:
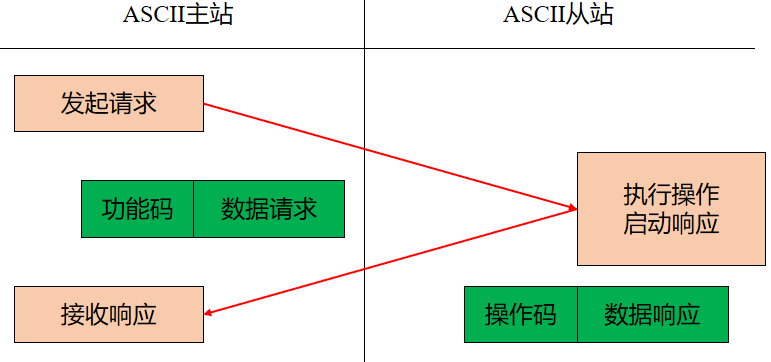
从上图我们不难看出,首先主站要主动发起数据请求,这也是它为什么被称之为主站的缘由。它首先告诉从站我需要哪些数据。然后从站按照主站的请求返回数据。主站得到响应后解析数据,这样就完成了主从站之间的一次数据通讯。所以主站就需要主动发起每一次数据通讯的对象。
虽然Modbus ASCII与Modbus RTU都是基于串行链路来实现的,但在数据传输的报文格式上存在较大区别。相比于Modbus RTU,Modbus ASCII采用ASCII码的形式来发送报文,并且有确定的起始字符和结束字符。具体结构如下:

在ASCII模式下,每个8位的字节被拆分成两个ASCII字符进行发送。对于数据部分,根据具体发送的数据量来确定长度。校验方式则采用的是LRC校验方式。LRC校验较为简单,把每一个需要传输的数据字节迭加后取反加1即可。
2、如何实现ASCII主站
我们已经简单的说明了什么是ASCII的主站,那么如何实现这一主站呢?其实在协议栈中,我们已经实现了主站的数据请求命令的合成以及响应数据的解析,所以我们使用协议栈来实现ASCII主站时,我们需要做的就是控制何时将协议栈合成的主站请求命令发出以及如何解析数据响应进而得到想要的数据的过程。
在我们的协议栈中实现了0x01、0x02、0x03、0x04、0x05、0x06、0x0F以及0x10等功能码。也就是说主站对象可以生成面向这些功能码的从站数据请求。也可以解析面向这些功能码的从站数据响应。可以表示为下图所示:
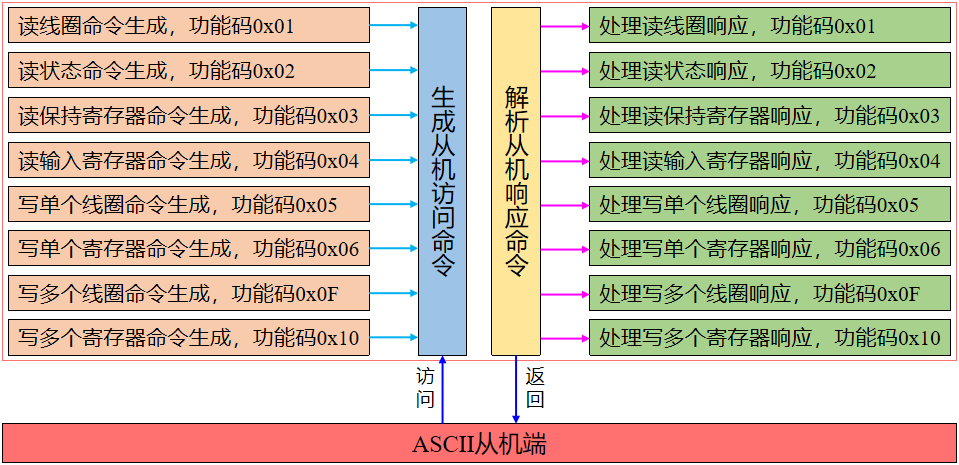
从上图我们很清楚,协议栈已经实现了面向这些功能码的数据请求命令的生成以及数据响应消息的解析。我们使用协议栈时需要做的就是要告诉协议栈我要生成哪些数据请求命令以及如何解析数据响应消息。
2.1、怎么生成数据请求
对于数据请求,我们不一定需要面向全部功能码的请求,我们只需要根据我们的需求合成我们想要的请求。
在协议栈中,针对数据请求的生成我们定义了一个从站访问命令生成函数。该函数的原型如下:
uint16_t CreateAccessAsciiSlaveCommand(ObjAccessInfo objInfo, void *dataList, uint8_t *commandBytes)
该函数有3个参数,其中ObjAccessInfo objInfo为对象访问信息;void *dataList为数据列表指针,该参数主要用于写从站功能的命令生成;uint8_t *commandBytes为返回的从站访问命令。
ObjAccessInfo是一个结构体,向函数传递我们想要生成的从站访问命令的相关信息,包括站地址,功能码,起始地址和数量。该结构体的定义如下:
1 /*定义用于传递要访问从站(服务器)的信息*/ 2 typedef struct{ 3 uint8_t unitID; 4 FunctionCode functionCode; 5 uint16_t startingAddress; 6 uint16_t quantity; 7 }ObjAccessInfo;
2.2、怎么解析数据响应
对于数据响应,我们同样不需要考虑全部的操作码,我们一般需要考虑读请求的响应,因为他们的数据需要解析。而对于写请求返回数响应只是告诉主站成功或者不成功,即使不成功只需要在写一次就可以了,不存在数据更新的问题。
在协议栈中,我们实现了主站解析从站数据响应的解析函数。使用这一函数我们只需要将收到的数据响应报文传递给解析函数就可以完成解析。该函数的原型定义如下:
void ParsingAsciiSlaveRespondMessage(AsciiLocalMasterType *master,uint8_t *recievedMessage, uint8_t *command,uint16_t rxLength)
这个函数有4个参数,其中RTULocalMasterType *master为主站对象;uint8_t *recievedMessage为接收到的响应消息;uint8_t *command为发送的命令序列。uint16_t rxLength是接受到的数据响应消息的长度。将这几个参数传递给解析函数就可实现数据响应的解析。
AsciiLocalMasterType 是一个结构体,用以生命一个主站对象,这个对象就是我们要实现各种操作的主站,这一结构体的定义如下:
1 /* 定义本地ASCII主站对象类型 */ 2 typedef struct LocalASCIIMasterType{ 3 uint32_t flagWriteSlave[8]; //写一个站控制标志位,最多256个站,与站地址对应。 4 uint16_t slaveNumber; //从站列表中从站的数量 5 uint16_t readOrder; //当前从站在从站列表中的位置 6 AsciiAccessedSlaveType *pSlave; //从站列表 7 UpdateCoilStatusType pUpdateCoilStatus; //更新线圈量函数 8 UpdateInputStatusType pUpdateInputStatus; //更新输入状态量函数 9 UpdateHoldingRegisterType pUpdateHoldingRegister; //更新保持寄存器量函数 10 UpdateInputResgisterType pUpdateInputResgister; //更新输入寄存器量函数 11 }AsciiLocalMasterType;
3、ASCII主站编码
我们已经设计了一个简单的ASCII主站示例,接下来我们就来编码实现并验证这一示例。
3.1、定义ASCII主站对象
首先我们要声明一个主站对象,这是我们操作的基础。在接下来的各种操作中我们都是基于这一对象来实现的。具体操作如下:
AsciiLocalMasterType asciiMaster;
定义了这个主站对象后,我们还需要对这一对象进行初始化。协议栈同样提供了一个主站对象的初始化函数。函数的原型定义如下:
1 /*初始化ASCII主站对象*/ 2 void InitializeASCIIMasterObject(AsciiLocalMasterType *master, 3 uint16_t slaveNumber, 4 AsciiAccessedSlaveType *pSlave, 5 UpdateCoilStatusType pUpdateCoilStatus, 6 UpdateInputStatusType pUpdateInputStatus, 7 UpdateHoldingRegisterType pUpdateHoldingRegister, 8 UpdateInputResgisterType pUpdateInputResgister 9 )
该函数的参数除了主站对象外,还有从站的数量即从站对象列表,还有四个数据更新函数指针。这几个函数指针将应用于数据响应的解析过程中,具体在后面描述。使用这一初始化函数实现对主站对象的初始化,使其能够实现各项操作,具体如下:
/*初始化RTU主站对象*/
InitializeASCIIMasterObject(&asciiMaster,2,asciiSlave,NULL,NULL,NULL,NULL);
这里我们将几个数据处理函数指针变量传入NULL,表示初始化为默认的操作函数,当然我们也可以编写这些函数,在后续的数据解析时将会详细说明。
3.2、生成主站数据请求
在前面,我们已经描述了数据请求命令的生成函数,该函数有一个ObjAccessInfo参数,这个参数用于传递需要生成命令的信息。这是一个结构体,我们需要定义一个对象变量。
ObjAccessInfo asciiInfo;
然后使用这个对象来实现数据请求的生成。具体操作如下所示:
1 /* 生成1号从站访问命令 */ 2 asciiInfo.unitID=asciiSlave[0].stationAddress; 3 asciiInfo.functionCode=ReadCoilStatus; 4 asciiInfo.startingAddress=0x0000; 5 asciiInfo.quantity=8; 6 7 CreateAccessAsciiSlaveCommand(asciiInfo,NULL,aSlave1ReadCommand[0]);
生成的数据请求什么时候发送给完全由主进程来实现已经与协议栈没有关系了。
3.3、解析从站数据响应
收到数据响应后我们需要对其进行解析。前面我们已经介绍了解析从站数据响应的函数。具体的调用形式如下:
ParsingAsciiSlaveRespondMessage(&asciiMaster,asciiRxBuffer,NULL,asciiRxLength);
我们对asciiMaster主站对象收到的从站响应asciiRxBuffer进行解析。最后传入的NULL表示我们不指定主站发送的数据请求,而是让主站从请求列表中去自己查找。
当然我们需要实现数据更新处理回调函数。这几个函数是在对象初始化的时候以函数指针的形式传递的。原型如下:
1 /*更新读回来的线圈状态*/ 2 __weak void UpdateCoilStatus(uint8_t salveAddress,uint16_t startAddress,uint16_t quantity,bool *stateValue) 3 { 4 //在客户端(主站)应用中实现 5 } 6 7 /*更新读回来的输入状态值*/ 8 __weak void UpdateInputStatus(uint8_t salveAddress,uint16_t startAddress,uint16_t quantity,bool *stateValue) 9 { 10 //在客户端(主站)应用中实现 11 } 12 13 /*更新读回来的保持寄存器*/ 14 __weak void UpdateHoldingRegister(uint8_t salveAddress,uint16_t startAddress,uint16_t quantity,uint16_t *registerValue) 15 { 16 //在客户端(主站)应用中实现 17 } 18 19 /*更新读回来的输入寄存器*/ 20 __weak void UpdateInputResgister(uint8_t salveAddress,uint16_t startAddress,uint16_t quantity,uint16_t *registerValue) 21 { 22 //在客户端(主站)应用中实现 23 }
我们可根据需要重定义这些函数,当然我们没有响应的数据可以不必实现,如我们没有使用输入寄存器,那么更新输入寄存器的回调函数则可以不用重定义。如下在我们的例子中重定义为:
1 /*更新读回来的保持寄存器*/ 2 void UpdateHoldingRegister(uint16_t startAddress,uint16_t quantity,uint16_t *registerValue) 3 { 4 uint16_t startRegister=HoldingResterEndAddress+1; 5 6 switch(salveAddress) 7 { 8 case BPQStationAddress: //更新读取的变频器参数 9 { 10 startRegister=36; 11 break; 12 } 13 case PUMPStationAddress: //更新蠕动泵 14 { 15 startRegister=HoldingResterEndAddress+1; 16 break; 17 } 18 case JIG1StationAddress: //更新摆臂小电机 19 { 20 startRegister=48; 21 break; 22 } 23 case JIG2StationAddress: //更新摆臂小电机 24 { 25 startRegister=52; 26 break; 27 } 28 case JIG3StationAddress: //更新摆臂小电机 29 { 30 startRegister=56; 31 break; 32 } 33 case HLPStationAddress: //更新红外温度 34 { 35 aPara.phyPara.hlpObjectTemperature=registerValue[0]/100.0; 36 startRegister=HoldingResterEndAddress+1; 37 break; 38 } 39 case ROL1StationAddress: //更新摆臂控制 40 { 41 startRegister=quantity<3?60:62; 42 break; 43 } 44 case ROL2StationAddress: //更新摆臂控制 45 { 46 startRegister=quantity<3?70:72; 47 break; 48 } 49 case ROL3StationAddress: //更新摆臂控制 50 { 51 startRegister=quantity<3?80:82; 52 break; 53 } 54 case DRUMStationAddress: //更新滚筒电机 55 { 56 startRegister=quantity<3?90:92; 57 break; 58 } 59 default: //故障态 60 { 61 startRegister=HoldingResterEndAddress+1; 62 break; 63 } 64 } 65 66 if(startRegister<=HoldingResterEndAddress) 67 { 68 for(int i=0;i<quantity;i++) 69 { 70 aPara.holdingRegister[startRegister+i]=registerValue[i]; 71 } 72 } 73 } 74 75 /*更新读回来的输入寄存器*/ 76 void UpdateInputResgister(uint16_t startAddress,uint16_t quantity,uint16_t *registerValue) 77 { 78 uint16_t startRegister=HoldingResterEndAddress+1; 79 80 switch(salveAddress) 81 { 82 case BPQStationAddress: //更新读取的变频器参数 83 { 84 startRegister=HoldingResterEndAddress+1; 85 break; 86 } 87 case PUMPStationAddress: //更新蠕动泵 88 { 89 aPara.phyPara.pumpRotateSpeed=(uint16_t)((float)registerValue[1]*6.0/128.0+0.5); //第二版背板 90 startRegister=HoldingResterEndAddress+1; 91 break; 92 } 93 case JIG1StationAddress: //更新摆臂小电机 94 { 95 startRegister=HoldingResterEndAddress+1; 96 break; 97 } 98 case JIG2StationAddress: //更新摆臂小电机 99 { 100 startRegister=HoldingResterEndAddress+1; 101 break; 102 } 103 case JIG3StationAddress: //更新摆臂小电机 104 { 105 startRegister=HoldingResterEndAddress+1; 106 break; 107 } 108 case ROL1StationAddress: //更新摆臂控制 109 { 110 startRegister=HoldingResterEndAddress+1; 111 break; 112 } 113 case ROL2StationAddress: //更新摆臂控制 114 { 115 startRegister=HoldingResterEndAddress+1; 116 break; 117 } 118 case ROL3StationAddress: //更新摆臂控制 119 { 120 startRegister=HoldingResterEndAddress+1; 121 break; 122 } 123 case DRUMStationAddress: //更新滚筒电机 124 { 125 startRegister=HoldingResterEndAddress+1; 126 break; 127 } 128 default: //故障态 129 { 130 startRegister=HoldingResterEndAddress+1; 131 break; 132 } 133 } 134 135 if(startRegister<=HoldingResterEndAddress) 136 { 137 for(int i=0;i<quantity;i++) 138 { 139 aPara.holdingRegister[startRegister+i]=registerValue[i]; 140 } 141 } 142 }
1 /*更新读回来的保持寄存器*/ 2 void UpdateHoldingRegister(uint16_t startAddress,uint16_t quantity,uint16_t *registerValue) 3 { 4 uint16_t startRegister=HoldingResterEndAddress+1; 5 6 switch(salveAddress) 7 { 8 case BPQStationAddress: //更新读取的变频器参数 9 { 10 startRegister=36; 11 break; 12 } 13 case PUMPStationAddress: //更新蠕动泵 14 { 15 startRegister=HoldingResterEndAddress+1; 16 break; 17 } 18 case JIG1StationAddress: //更新摆臂小电机 19 { 20 startRegister=48; 21 break; 22 } 23 case JIG2StationAddress: //更新摆臂小电机 24 { 25 startRegister=52; 26 break; 27 } 28 case JIG3StationAddress: //更新摆臂小电机 29 { 30 startRegister=56; 31 break; 32 } 33 case HLPStationAddress: //更新红外温度 34 { 35 aPara.phyPara.hlpObjectTemperature=registerValue[0]/100.0; 36 startRegister=HoldingResterEndAddress+1; 37 break; 38 } 39 case ROL1StationAddress: //更新摆臂控制 40 { 41 startRegister=quantity<3?60:62; 42 break; 43 } 44 case ROL2StationAddress: //更新摆臂控制 45 { 46 startRegister=quantity<3?70:72; 47 break; 48 } 49 case ROL3StationAddress: //更新摆臂控制 50 { 51 startRegister=quantity<3?80:82; 52 break; 53 } 54 case DRUMStationAddress: //更新滚筒电机 55 { 56 startRegister=quantity<3?90:92; 57 break; 58 } 59 default: //故障态 60 { 61 startRegister=HoldingResterEndAddress+1; 62 break; 63 } 64 } 65 66 if(startRegister<=HoldingResterEndAddress) 67 { 68 for(int i=0;i<quantity;i++) 69 { 70 aPara.holdingRegister[startRegister+i]=registerValue[i]; 71 } 72 } 73 } 74 75 /*更新读回来的输入寄存器*/ 76 void UpdateInputResgister(uint16_t startAddress,uint16_t quantity,uint16_t *registerValue) 77 { 78 uint16_t startRegister=HoldingResterEndAddress+1; 79 80 switch(salveAddress) 81 { 82 case BPQStationAddress: //更新读取的变频器参数 83 { 84 startRegister=HoldingResterEndAddress+1; 85 break; 86 } 87 case PUMPStationAddress: //更新蠕动泵 88 { 89 aPara.phyPara.pumpRotateSpeed=(uint16_t)((float)registerValue[1]*6.0/128.0+0.5); //第二版背板 90 startRegister=HoldingResterEndAddress+1; 91 break; 92 } 93 case JIG1StationAddress: //更新摆臂小电机 94 { 95 startRegister=HoldingResterEndAddress+1; 96 break; 97 } 98 case JIG2StationAddress: //更新摆臂小电机 99 { 100 startRegister=HoldingResterEndAddress+1; 101 break; 102 } 103 case JIG3StationAddress: //更新摆臂小电机 104 { 105 startRegister=HoldingResterEndAddress+1; 106 break; 107 } 108 case ROL1StationAddress: //更新摆臂控制 109 { 110 startRegister=HoldingResterEndAddress+1; 111 break; 112 } 113 case ROL2StationAddress: //更新摆臂控制 114 { 115 startRegister=HoldingResterEndAddress+1; 116 break; 117 } 118 case ROL3StationAddress: //更新摆臂控制 119 { 120 startRegister=HoldingResterEndAddress+1; 121 break; 122 } 123 case DRUMStationAddress: //更新滚筒电机 124 { 125 startRegister=HoldingResterEndAddress+1; 126 break; 127 } 128 default: //故障态 129 { 130 startRegister=HoldingResterEndAddress+1; 131 break; 132 } 133 } 134 135 if(startRegister<=HoldingResterEndAddress) 136 { 137 for(int i=0;i<quantity;i++) 138 { 139 aPara.holdingRegister[startRegister+i]=registerValue[i]; 140 } 141 } 142 }
4、ASCII主站小结
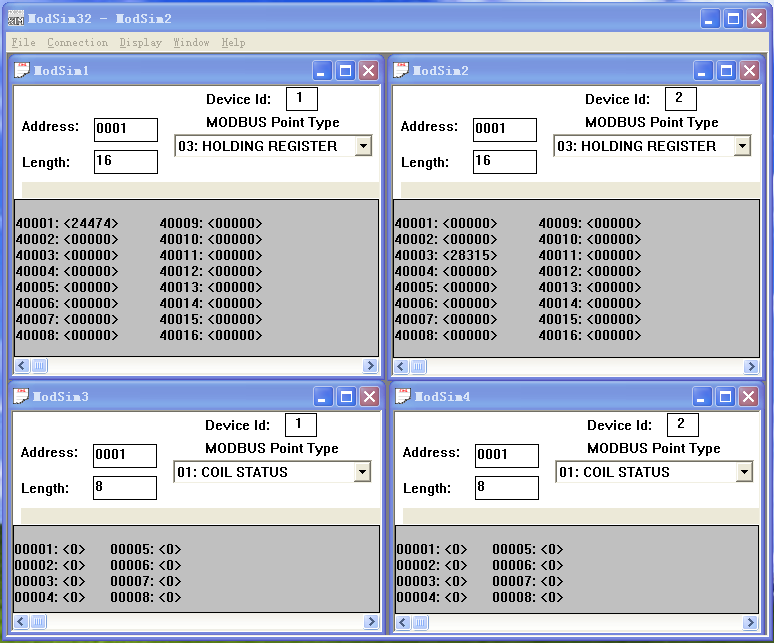
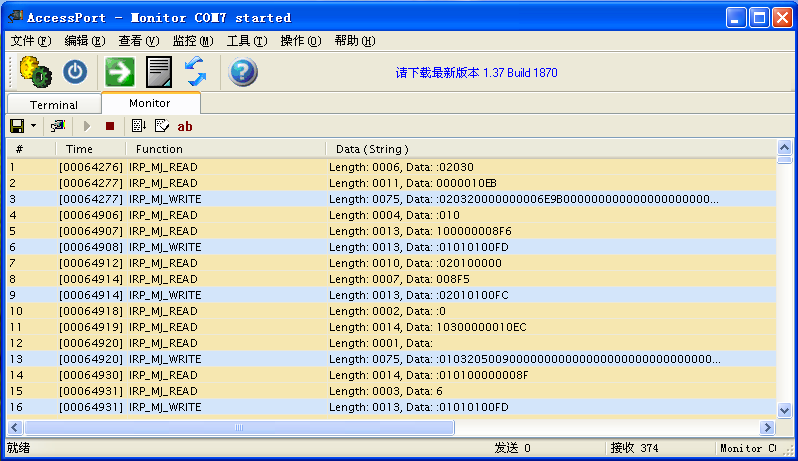
我们实现了这个ASCII主站实例,我们可以使用如Modsim这样的软件在PC上模拟Modbus ASCII从站来测试这个主站应用。如果自己编写报文也可使用如串口助手之类的软件测试。这里我们使用Modsim模拟从站,以AccessPort监视其收发状态,测试结果如下图:
在使用协议栈实现ASCII主站时需要注意,协议栈支持在同一设备上以不同的通讯端口实现不同的主站应用,而且每一台主站都支持多个从站。具体实现只需要根据协议栈定义就可以了。
我们来总结一下使用协议栈实现主站应用的步骤,以方便大家使用协议栈实现Modbus ASCII主站应用。
第一步,使用主站对象类型声明一个主站对象。然后对这个主站对象进行初始化。初始化主站对象时。需要指定从站数量,从站列表以及更新数据的回调函数指针。
第二步,生成访问从站的数据请求列表。这个数据请求列表是按每一台从站来划分的,将列表的指针存在对应的从站对象中。然后在需要的时候发送相应的数据请求。
第三步,解析接收的从站数据响应。协议栈已经定义好了解析函数,只需传入消息就可自动解析。但是更新数据的回调函数必须根据具体的变量来编写。可以每台主站独立编写也可使用默认的函数。不过建议每台主站独立编写,这样比较清晰。
源码下载:https://download.csdn.net/download/foxclever/12882021
欢迎关注:
