在无人驾驶领域有很多不确定性,我们知道车辆位置,速度,方向等测量值,不可能是完美的侧量,每一个测量值都有不确定性,我们知道这些测量值会相互影响。例如我们对车辆的位置不确定,我们需要收集车辆周边和移动的数据,无人驾驶车使用传感器测量车辆速度,周边景色,物体。尽管传感器测量的数据并不完美,我们把这些信息结合起来,使用条件概率和贝叶斯法则就能得到车辆位置,移动,及环境的可靠表述。
贝叶斯法则对无人驾驶非常重要,在给定初始预测条件下,如果我们收集更多相关数据,即使预测所依赖的数据,那么我们就可以改进预测,例如假设我们的初始预测,又称先验信念,是对道路上车辆位置的估计,可能是不咋么准确的GPS给出的位置,然后我们使用传感器收集汽车周边数据和汽车移动方式的数据,贝叶斯法则利用传感器数据可以改进我们我们对车辆位置的预测。
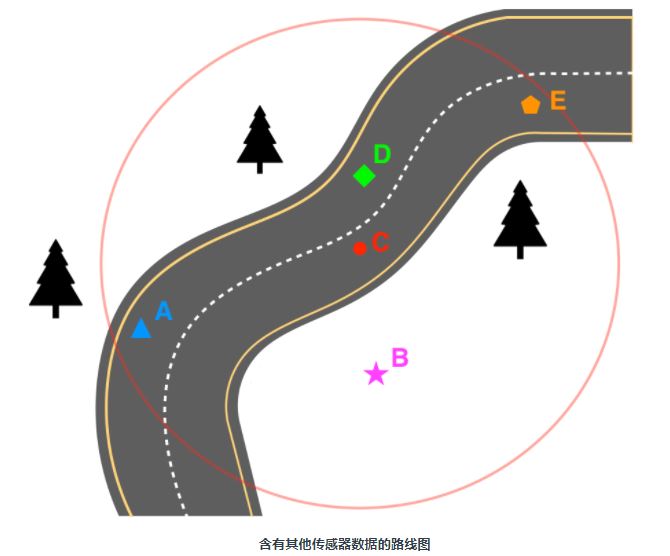
我们对 (上图所示) 汽车所在的路线图了解很少。我们也有 GPS 初始测量;GPS 信号表明汽车位于红点位置。然而这个 GPS 测量并不准确,误差达 5 米。所以这辆汽车可能停在红点周围半径 5 米的任何地方。
传感器
然后我们通过汽车的传感器收集数据。无人驾驶汽车主要使用以下三种传感器观察世界:
- 摄像头:可以拍摄视频,
- 光学雷达:是基于光学的传感器,
- 雷达:使用无线电波。
所有这些传感器探测周围物体和场景。
无人驾驶汽车也有许多 内部传感器,可以测量汽车行驶的速度和方向、车轮方向,甚至是车内温度!
传感器测量
假设我们的传感器探测到地形和汽车行驶的具体信息,如下:
- 这辆汽车可能在方圆半径 5 米的任何地方,
- 汽车正在爬坡行驶,
- 汽车左侧有棵树,
- 汽车车轮指向右边。
在只了解这些传感器测量的情况下,请检查下方地图,并回答下列测试问题。
通过这个例子我们基本上可以准确预测车辆的位置。我们收集了传感器信息和周边信息后,我们就可以改进我们初始位置的预测。贝叶斯法则能让我们用数学方法来纠正测量数据,并让我们不确定的先验变得越来越可靠。