自动驾驶汽车使用激光雷达跟踪其他车辆,如何找到其他车辆?我想找到其他车辆的原因是我不想和其他车辆发生碰撞。
为了进行评估 我们必须得先明白如何解释传感器数据。不知是明白其他车辆在那,还要知道速度是多少,这样你就可以避免与他们进行碰撞,这对行人和其他物体也很重要。
知道其他车在那里,并且对他们将要去那里做出预测。
卡尔曼滤波是一个非常流行的系统状态估计的方法,他和概率定位相当相似,我们之前学过的蒙特卡罗定位方法,主要区别是 卡尔曼是对一个连续状态进行估计,而蒙特卡罗将世界分成很多离散的小块,作为结果,卡尔曼给我们一个单峰分布,蒙特卡罗是多峰分布。这两种方法都适用与定位和对其他车辆的追踪。事实上粒子滤波也适用于定位和预测,粒子滤波是连续多峰分布的。
接下来我们来看卡尔曼滤波
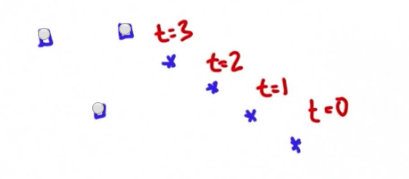
预测t4在哪?
t4 在t3的上面,从观测值来看,你可以说速度指向这个向量的方向。
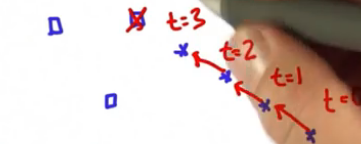
卡尔曼滤波使用这些观测值预测未来的位置和速度。
实现一个程序,让你使用像这样的数据点,就算它们有噪声而且不确定。自动预测未来的位置可能在哪里和物体的运行速度。google自动驾驶汽车使用像这样的方法来理解,交通流量在那,根据雷达和激光测距数据。