想象一下,你和你的朋友在一个城市开车。你有一个你正试图达成的目标。你坐在乘客座位上,你的朋友正在开车。
您将该目标插入Google地图和您得到一些能够让你到达目的地的路线。司机不应该关心具体路线的细节。
对,因为司机相信你的行为,作为导航员,会告诉他们他们需要做什么样的动作,而且是
了解到他们只是负责执行它们。在这种情况下,乘客的责任是类似于自动驾驶汽车行为规划者的责任。
所以,如果你告诉你的朋友向左走,他们会这样做。当你告诉司机通过一辆慢车时,
司机不会担心他们是否有足够的时间这样做,因为他们会认为你已经考虑过这个问题并且你确信他们可以做到。
但导航员不对安全负责。如果你告诉司机回到左侧车道,但有一辆车正在行驶,你会假设他们会等待移动
直到有足够的空间安全地进行。导航员还会告诉司机何时保持他们的车道和时间时间转弯或改变车道或可能调整速度。
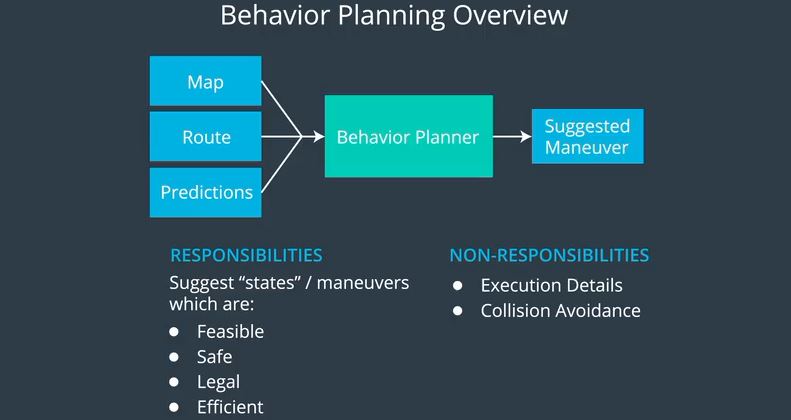
最后,一旦你到达你的目的地,你会告诉司机停下来。所以,总结一下,行为规划师是
目前是一个黑匣子,它将世界地图作为输入,到目的地的路线,并预测其他静态和动态障碍可能会发生什么,
并作为输出产生车辆的调整后的机动。

轨迹规划者负责实现无碰撞,平稳和安全。本课的目标是开放这个黑匣子,并学习如何实施行为计划。
所以责任行为模块将建议可行的机动,尽可能安全,合法,高效。行为规划师不负责任用于执行细节和避免碰撞。
我们将要教授的行为计划方法,这一课与大多数车辆使用的是相同的,包括在DARPA城市挑战赛中的获胜者。
事实上,这是一种方法,奔驰在他们的Bertha Benz Drive中使用的行为规划,
你可以看到它有能力处理复杂的交通情况如导航交叉口和密集的城市交通。
虽然这种方法不一定是最常见的,由于我们稍后会讨论的原因,它在该领域广为人知,它的确给予了
对行为计划者发生的事情有非常高层次的理解。