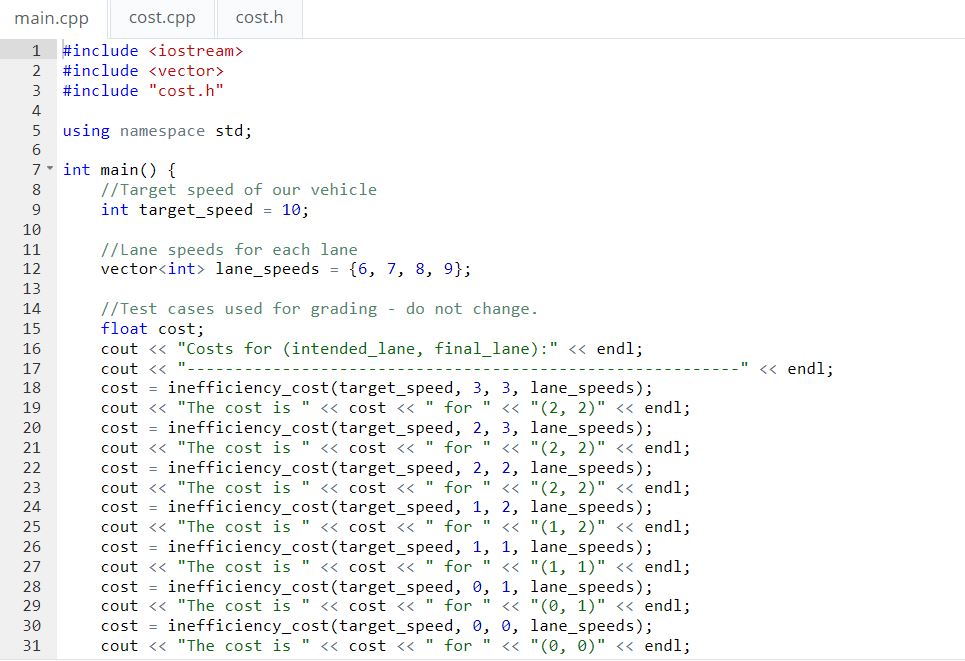
在大多数情况下,单一成本函数不足以产生复杂的车辆行为。在这个测验中,我们希望您在C ++中实现更多的成本函数。我们稍后会在本课中使用这两个C ++成本函数。这个测验的目标是创建一个成本函数,使车辆在最快的车道中行驶,给出几个行为选项。我们将为该功能提供以下四个输入:
- 目标速度:目前设置为10(无单位),您希望车辆行驶的速度。
- 预定车道:给定行为的预定车道。对于PLCR,PLCL,LCR和LCL,这将是当前车道的一个车道。
- 最后车道:给定行为的最终通道。对于LCR和LCL,这将是一条通道。
- 基于该车道中的交通量的车道速度向量:{6,7,8,9}。
您在实施中的任务是创建一个满足以下条件的成本函数:
- 由于预定车道和最终车道都是高速车道,所以成本降低。
- 成本函数为每种可能的行为提供不同的成本:KL,PLCR / PLCL,LCR / LCL。
- 成本函数生成的值在0到1的范围内。