- 霍夫检测-直线
前提条件 – 边缘检测已经完成,霍夫变换解决平面空间到极坐标空间转换。

 从霍夫空间曲线图来看,取不同的像素点都汇聚在一个点,这表明这些个像素点都属于同一条直线。(xi,yi).对于任意一条直线上的所有点来说变换到极坐标中,从[0~360]空间,可以得到r的大小属于同一条直线上点在极坐标空(r, θ)必然在一个点上有最强的信号出现(如上图),根据此反算到平面坐标中就可以得到直线上各点的像素坐标。从而得到直线。
从霍夫空间曲线图来看,取不同的像素点都汇聚在一个点,这表明这些个像素点都属于同一条直线。(xi,yi).对于任意一条直线上的所有点来说变换到极坐标中,从[0~360]空间,可以得到r的大小属于同一条直线上点在极坐标空(r, θ)必然在一个点上有最强的信号出现(如上图),根据此反算到平面坐标中就可以得到直线上各点的像素坐标。从而得到直线。
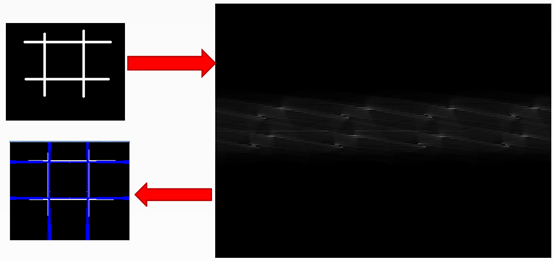
下图第一张为原图,第二张为提取边缘,第三张为直线检测并绘制。

- 霍夫检测-圆
极坐标变换原理:
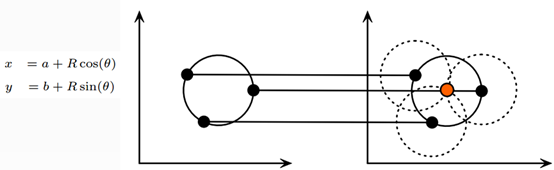
从平面坐标到极坐标转换三个参数C(x0,y0,r)其中(x0,y0)是圆心假设平面坐标的任意一个圆上的点,转换到极坐标中:C(x0,y0,r)处有最大值,霍夫变换正是利用这个原理实现圆的检测。

霍夫圆检测对噪声比较敏感,所以首先要对图像做中值滤波。

相关函数如下:
1 //标准的霍夫变换HoughLines从平面坐标转换到霍夫空间, 2 //最终输出是表示极坐标空间霍夫变换直线概率,要自己反变换到平面空间,一般不用; 3 HoughLinesP(int1,out1,)最终输出是直线的两个点(x1,y1,x2,y2). 4 5 霍夫直线检测HoughLinesP(out1,plinel,1,CV_PI/180.0,10,0,0); 6 // out1为要检测的灰度图像,plinel 为输出的直线的两点,类型为vector<Vec4f>plinel; 7 // 1为生成极坐标时候的像素扫描步长,CV_PI/180.0生成极坐标时候的角度步长,一般取值CV_PI/180,10为阈值, 8 //只有获得足够交点的极坐标点才被看成是直线,最小直线长度0最大间隔0; 9 for (size_t i=0;i<plinel.size();i++) 10 { 11 Vec4f hline = plinel[i]; 12 line(out2, Point(hline[0], hline[1]), 13 Point(hline[2], hline[3]), 14 colorf3, 3, 8); 15 } 16 17 霍夫圆检测HoughCircles(out2, pcircle, CV_HOUGH_GRADIENT,1, 10, 100, 30,80,100); 18 //out2为要检测的灰度图像,pcircle 为输出的圆心及半径,类型为vector<Vec3f>pcircle; 19 //10 最短距离-可以分辨是两个圆的,否则认为是同心圆,30为中心点累加器阈值用于确定圆心80为最小半径100最大半径, 20 Mat dst = Mat(in1_image.size(), in1_image.type()); 21 for (size_t i=0;i< pcircle.size();i++) 22 { 23 Vec3f cc = pcircle[i]; 24 circle(dst,Point(cc[0], cc[0]), cc[2], colorf3,2,LINE_AA); 25 circle(dst, Point(cc[0], cc[0]), 3, colorf, 2, LINE_AA); 26 }