1、ROS框架
分为以下三个级别:
1)文件系统级
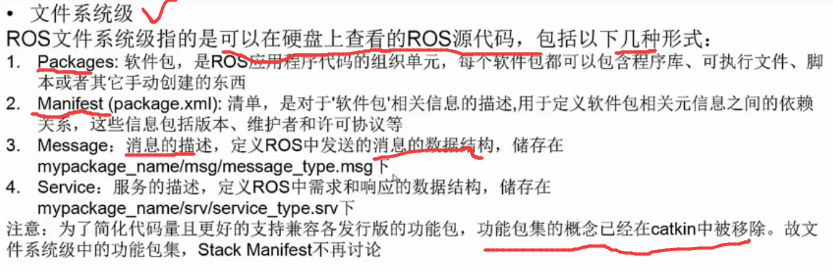
2)计算图级
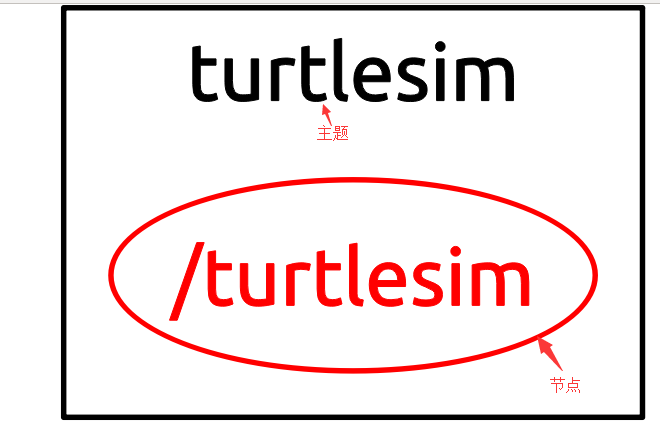
计算图级是ROS处理数据的一种点对点的网络形式,描述程序是如何运行的。
基本的计算图级概念包括:节点,参数服务器,消息,服务,主题和包等
节点:node,一个节点即为一个可执行文件,它可以通过ROS与其他节点进行通信;
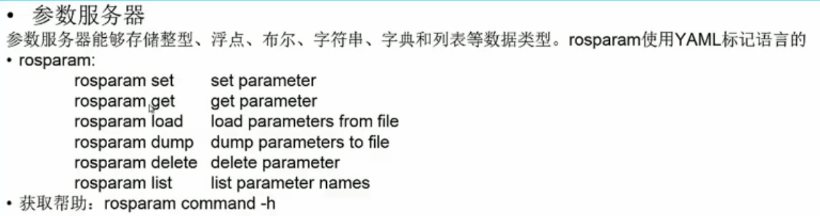
参数服务器:parameter server 参数服务器允许数据通过在一个中心位置的关键词来存储;
举个例子:
要看turtlesim仿真器的参数有哪些,可以先运行该仿真节点,rosrun turtlesim turtlesim_node,然后再打开一个终端输入rosparam list可以列出当前所有的参数。
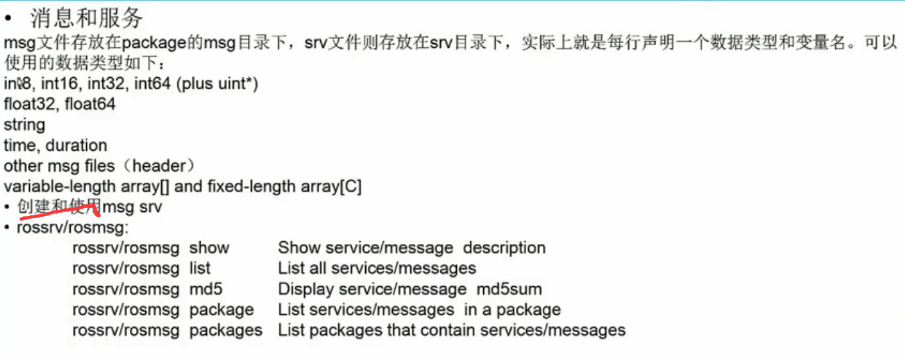
消息:message,消息是一种ROS数据类型,用于订阅或发布到一个话题;
例子:
还是以上面的例子来说,再打开一个终端,因为要查看某个消息,先查看某个主题,rostopic list,列出一些主题,下面以/turtle1/cmd_vel为例,
查看该话题的相关信息,rostopic info /turtle1/cmd_vel;然后可以看到它的发布者,订阅者以及消息类型,它的消息类型为
geometry_msgs/Twist.下面查看该消息的具体类型rosmsg show geometry_msgs/Twist。
下面是往某话题上发布某消息的命令行上的命令:

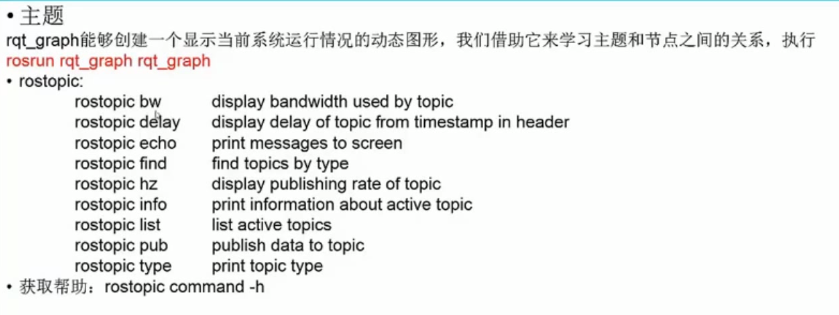
主题:topic,节点可以发布消息到话题,也可以订阅话题以接收消息;
服务:services,是节点之间通讯的另一种方式,服务允许节点发送请求并获得响应。
服务的用法类似于topic


上面使用rosservice list查看了当前的所有服务,并使用rosservice info /clear来查看了服务/clear的相关信息,得到该服务的类型是std_srvs/Empty,然后使用rossrv show std_srvs/Empty来查看该服务类型的具体信息。
消息记录包:bag,是一种用于保存和回放ROS消息数据的格式。如保存地图并回放
节点管理器:master,ROS名称服务(如帮助节点找到彼此)
rosout:ROS中相当于stdout/stderr
roscore:主机+rosout+参数服务器
3)社区级
即网络软件仓库:ros club exbot.
ROS的基本命令和工具


主题