第七章作业
作者:曾是少年
二 Bundle Adjustment
2.1 文献阅读(2 分)
我们在第五讲中已经介绍了Bundle Adjustment,指明它可以用于解PnP 问题。现在,我们又在后端中说明了它可以用于解大规模的三维重构问题,但在实时SLAM 场合往往需要控制规模。事实上,Bundle Adjustment 的历史远⽐我们想象的要长。请阅读Bill Triggs 的经典论文Bundle Adjustment: A Modern Synthesis(见paper/目录)1,了解BA 的发展历史,然后回答下列问题:
1. 为何说Bundle Adjustment is slow 是不对的?
答:可以利用H矩阵的稀疏性进行优化。
原文中如下所示:
“Optimization / bundle adjustment is slow”: Such statements often appear in papers introducing yet another heuristic Structure from Motion (SFM) iteration. The claimed slowness is almost always due to the unthinking use of a general-purpose optimization routine that completely ignores the problem structure and sparseness. Real bundle routines are much more efficient than this, and usually considerably more efficient and flexible than the newly suggested method (§6, 7). That is why bundle adjustment remains the dominant structure refinement technique for real applications, after 40 years of research.”
翻译:“优化/束调整运行缓慢”:这种陈述经常出现在介绍启发式SFM的论文中。他们把BA速度缓慢的原因归咎于通用的优化流程,该例程完全忽略了问题结构的稀疏性。实际的BA例程要高效很多,并且通常比新提出的方法(第6、7节)更加高效灵活。这就是经过40年的研究后,BA依然是实际应用中占主导地位的结构精炼技术。
2. BA 中有哪些需要注意参数化的地方?Pose 和Point 各有哪些参数化⽅式?有何优缺点。
答:BA中需要被参数化的地方包括:相机位姿、相机内参、三维特征点P以及投影后的像素坐标;
pose
三维欧拉角十三维位移,四元数+三维位移,旋转矩阵十三维位移,变换矩阵等。欧拉角-万向锁问题。
旋转矩阵-直观,但自由度过多,小旋转给不出确切矩阵。
四元数参数简洁,不直观。
point
homogeneous affine(X,Y,Z,1)-直观,但是需要参数有较大的改变才能明显的影响到 cost function. homogeneous projective parametrization(X,Y,Z,W)-可以表示距 离无穷远的点。
总结一下BA过程首先选择你想要的图里的节点与边的类型,确定它们的参数化形式;
- 往图里加入实际的节点和边;
- 选择初值,开始迭代;
- 每一步迭代中,计算对应于当前估计值的雅可比矩阵和海塞矩阵;
- 求解稀疏线性方程(H_kΔx=−b_k),得到梯度方向;
- 继续用GN或LM进行迭代。如果迭代结束,返回优化值。
Point 参数化方式
视觉SLAM中点的参数化表示包括三维坐标XYZ和逆深度表示方法。
Open VINS文档中给出了五种特征参数化表示:Global XYZ,Global Inverse Depth,Anchored XYZ,Anchored Inverse Depth,Anchored Inverse Depth (MSCKF Version),区别在于:
- Global vs Anchored:特征点的表示是全局坐标系的坐标还是局部相机坐标系的坐标。
- XYZ vs Inverse Depth:使用的XYZ还是逆深度
- Two different Inverse Depth:两种不同类型的逆深度参数
三维坐标XYZ:优点在于简单直观;缺点在于不能表示无穷远点;
逆深度:优点在于能够建模无穷远点;在实际应用中,逆深度也具有更好的数值稳定性。
Pose参数化方式
Pose的参数化表示包括欧拉角、四元数、变换矩阵。
-
欧拉角
优点:容易理解,形象直观;三个值分别对应x、y、z轴的旋转角度。
缺点:欧拉角这种方法是要按照一个固定的坐标轴的顺序旋转的,因此不同的顺序会造成不同结果;欧拉角旋转会造成万向锁现象,这种现象的发生就是由于上述固定的坐标轴旋转顺序造成的。由于万向锁的存在,欧拉旋转无法实现球面平滑插值。
-
变换矩阵
优点:旋转轴可以是任意向量
缺点:旋转其实只需要知道一个向量+一个角度(共4自由度),但矩阵却用了16个元素(消耗时间和内存)
-
四元数
优点:可以避免万向锁问题;只需要一个4维的四元数就可以执行绕任意过原点的向量的旋转,方便快捷,在某些实现下比旋转矩阵效率更高;而且四元数旋转可以提供平滑插值。
缺点:比欧拉旋转稍微复杂了一点,因为多了一个维度,理解更困难,不直观。带有约束条件
3. 本文写于2000 年,但是文中提到的很多内容在后面十几年的研究中得到了印证。你能看到哪些方向在后续工作中有所体现?请举例说明。
答:3.4节的 Intensity- based methods就是BA在直接法中的应用。第5节 Network Structure可以对应到SLAM中的图优化模型;H的稀疏性可以实现BA实时,在07年的PTAM上实现。
2.2 BAL-dataset
BAL(Bundle Adjustment in large)数据集是⼀个⼤型BA 数据集,它提供了相机与点初始值与观测,你可以⽤它们进⾏Bundle Adjustment。现在,请你使⽤g2o,自己定义Vertex 和Edge(不要使用自带的顶点类型,也不要像本书例程那边调用Ceres来求导),书写BAL 上的BA 程序。你可以挑选其中⼀个数据,运行你的BA,并给出优化后的点云图。
本题不提供代码框架,请独立完成。
提示:
- 注意BAL 的投影模型⽐教材中介绍的多了个负号;
答:(本题我没有思路,因此主要是参考了网络上的代码进行学习验证的)
一般情况下,使用g2o的主要过程如下:
- 定义顶点和边的类型
- 构建图
- 选择优化算法
- 调用g2o
具体编程过程如下:
-
打开BAL数据集文件
problem-16-22106-pre.txt。描述问题这一部分调用common.cpp中的BALProblem类来进行
//读取BAL数据 string bal_file_name = "problem-16-22106-pre.txt"; //读取BAL数据 构建BAL问题 BALProblem bal_problem(bal_file_name); //调用Normalize接口对数据进行归一化 bal_problem.Normalize(); //调用Perturb接口对数据添加噪声 bal_problem.Perturb(0.1,0.5,0.5); -
定义顶点(使用节点来表示相机和路标)
相机位姿节点
//相机位姿节点 //继承的g2o::BaseVertex基类 <优化变量维度,数据类型> /// 位姿加相机内参的顶点,9维,前三维为so3,接下去为t, f, k1, k2 class VertexPoseAndIntrinsics : public g2o::BaseVertex<9, PoseAndIntrinsics> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW; VertexPoseAndIntrinsics() {} //重置 virtual void setToOriginImpl() override { _estimate = PoseAndIntrinsics(); } //更新 virtual void oplusImpl(const double *update) override { _estimate.rotation = SO3d::exp(Vector3d(update[0], update[1], update[2])) * _estimate.rotation; //李代数的更新方式 _estimate.translation += Vector3d(update[3], update[4], update[5]); //平移部分的更新 _estimate.focal += update[6]; //更新焦距 _estimate.k1 += update[7]; //更新内参 _estimate.k2 += update[8]; //更新内参 } /// 根据估计值投影一个点 Vector2d project(const Vector3d &point) { Vector3d pc = _estimate.rotation * point + _estimate.translation; pc = -pc / pc[2]; double r2 = pc.squaredNorm(); double distortion = 1.0 + r2 * (_estimate.k1 + _estimate.k2 * r2); return Vector2d(_estimate.focal * distortion * pc[0], _estimate.focal * distortion * pc[1]); } //读盘和存盘 virtual bool read(istream &in) {} virtual bool write(ostream &out) const {} };路标节点
class VertexPoint : public g2o::BaseVertex<3, Vector3d> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW; VertexPoint() {} virtual void setToOriginImpl() override { _estimate = Vector3d(0, 0, 0); } virtual void oplusImpl(const double *update) override { _estimate += Vector3d(update[0], update[1], update[2]); } virtual bool read(istream &in) {} virtual bool write(ostream &out) const {} }; -
投影边
// 边的定义 // 观测边 class EdgeProjection : public g2o::BaseBinaryEdge<2, Vector2d, VertexPoseAndIntrinsics, VertexPoint> { public: EIGEN_MAKE_ALIGNED_OPERATOR_NEW; virtual void computeError() override { auto v0 = (VertexPoseAndIntrinsics *) _vertices[0]; auto v1 = (VertexPoint *) _vertices[1]; auto proj = v0->project(v1->estimate()); //estimate 可以返回该节点的当前估计 _error = proj - _measurement; //计算误差 } // use numeric derivatives virtual bool read(istream &in) {} virtual bool write(ostream &out) const {} }; -
选择优化算法(在solve算法中)
const int point_block_size = bal_problem.point_block_size(); const int camera_block_size = bal_problem.camera_block_size(); double *points = bal_problem.mutable_points(); //得到point参数的起始地址 double *cameras = bal_problem.mutable_cameras(); //得到camera参数的起始地址 // pose dimension 9, landmark is 3 typedef g2o::BlockSolver<g2o::BlockSolverTraits<9, 3>> BlockSolverType; typedef g2o::LinearSolverCSparse<BlockSolverType::PoseMatrixType> LinearSolverType; //改了一处 // use LM // 选择使用LM算法进行优化 auto solver = new g2o::OptimizationAlgorithmLevenberg( g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>())); g2o::SparseOptimizer optimizer; optimizer.setAlgorithm(solver); optimizer.setVerbose(true); -
构建g2o问题
/// build g2o problem const double *observations = bal_problem.observations(); // 添加顶点 Vertex vector<VertexPoseAndIntrinsics *> vertex_pose_intrinsics; vector<VertexPoint *> vertex_points; // 添加相机位姿节点 for (int i = 0; i < bal_problem.num_cameras(); ++i) { VertexPoseAndIntrinsics *v = new VertexPoseAndIntrinsics(); double *camera = cameras + camera_block_size * i; v->setId(i); v->setEstimate(PoseAndIntrinsics(camera)); optimizer.addVertex(v); vertex_pose_intrinsics.push_back(v); } // 添加路标节点 for (int i = 0; i < bal_problem.num_points(); ++i) { VertexPoint *v = new VertexPoint(); double *point = points + point_block_size * i; v->setId(i + bal_problem.num_cameras()); v->setEstimate(Vector3d(point[0], point[1], point[2])); // g2o在BA中需要手动设置待Marg的顶点 v->setMarginalized(true); optimizer.addVertex(v); vertex_points.push_back(v); } // 添加边 edge for (int i = 0; i < bal_problem.num_observations(); ++i) { EdgeProjection *edge = new EdgeProjection; edge->setVertex(0, vertex_pose_intrinsics[bal_problem.camera_index()[i]]); edge->setVertex(1, vertex_points[bal_problem.point_index()[i]]); edge->setMeasurement(Vector2d(observations[2 * i + 0], observations[2 * i + 1])); edge->setInformation(Matrix2d::Identity()); edge->setRobustKernel(new g2o::RobustKernelHuber()); optimizer.addEdge(edge); } -
调用g2o
optimizer.initializeOptimization(); optimizer.optimize(40); // set to bal problem for (int i = 0; i < bal_problem.num_cameras(); ++i) { double *camera = cameras + camera_block_size * i; auto vertex = vertex_pose_intrinsics[i]; auto estimate = vertex->estimate(); estimate.set_to(camera); } for (int i = 0; i < bal_problem.num_points(); ++i) { double *point = points + point_block_size * i; auto vertex = vertex_points[i]; for (int k = 0; k < 3; ++k) point[k] = vertex->estimate()[k]; }
程序运行截图如下:
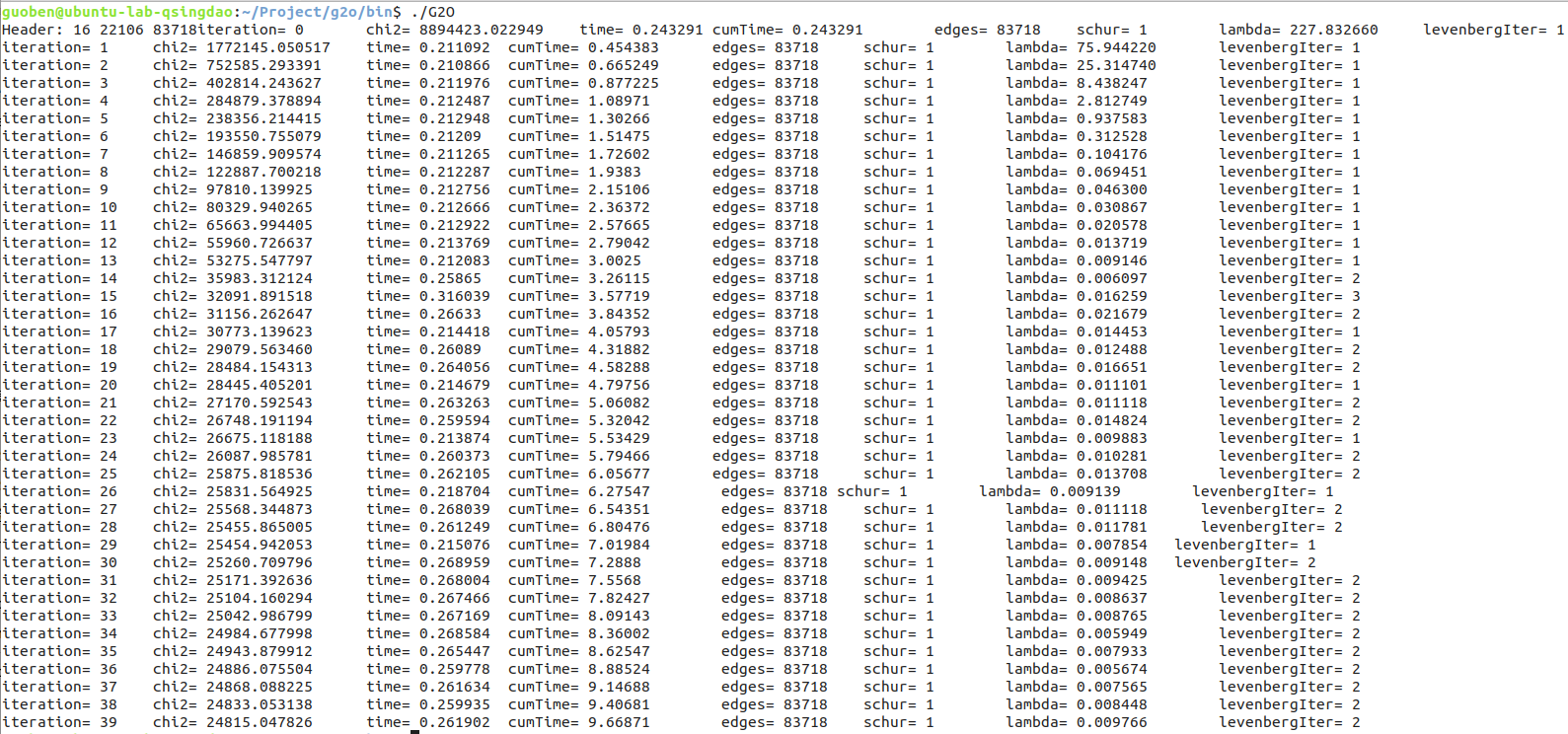
使用MeshLab打开生成的两个PLY文件,截图如下:
初始的点云文件
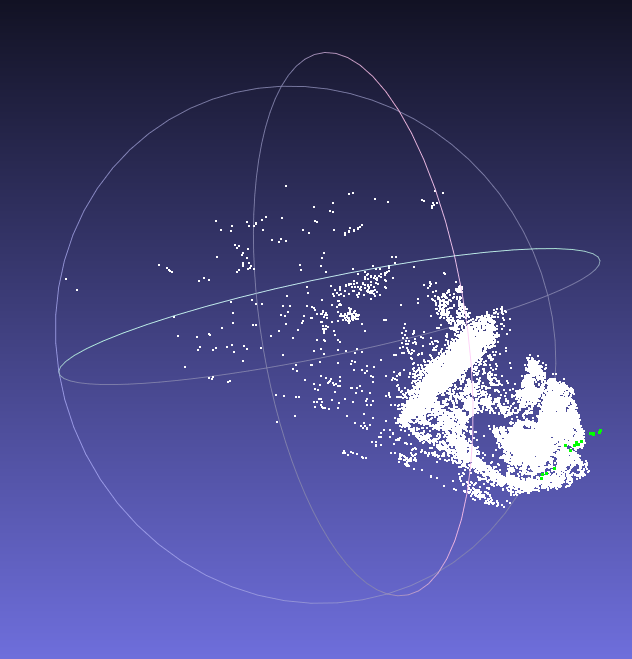
经过给g2o BA优化的点云文件如下:
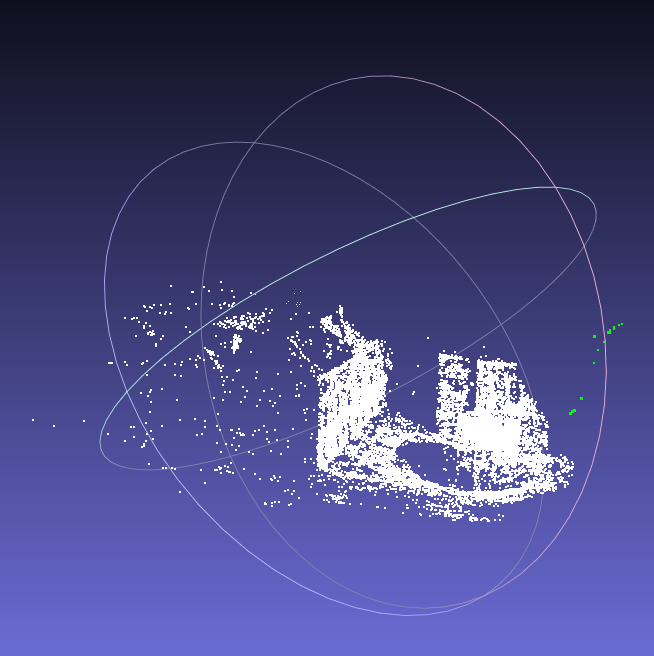
可以看出,通过给g2o BA优化的点云结构更加紧凑 条理也更加清晰
BuildGraph是核心函数
三 直接法的 Bundle Adjustment (5 分,约 3 小时)
3.1 数学模型
特征点法的 BA 以最小化重投影误差作为优化目标。相对的,如果我们以最小化光度误差为目标,就得到了直接法的 BA。之前我们在直接法 VO 中,谈到了如何用直接法去估计相机位姿。但是直接法亦可用来处理整个 Bundle Adjustment。下面,请你推导直接法 BA 的数学模型,并完成它的 g2o 实现。注意本题使用的参数化形式与实际的直接法还有⼀点不同,我们用 x, y, z 参数化每⼀个 3D 点,而实际的直接法多采用逆深度参数化 [1]。
本题给定 7 张图片,记为 0.png 至 6.png,每张图片对应的相机位姿初始值为 (T_i),以 (T_{cw}) 形式存储在 poses.txt 文件中,其中每⼀行代表⼀个相机的位姿,格式如之前作业那样:
(time, t_x, t_y, t_z, q_x, q_y, q_z, q_w)
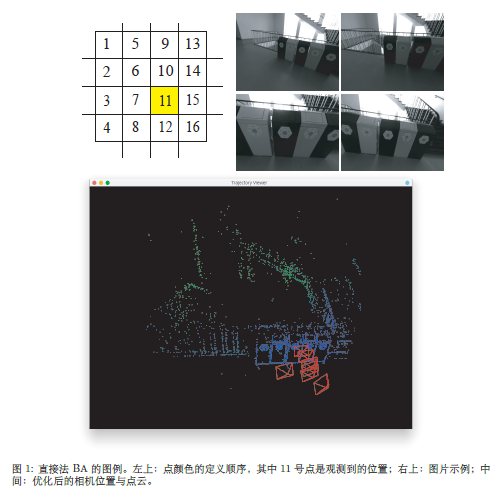
平移在前,旋转(四元数形式)在后。同时,还存在⼀个 3D 点集 P,共 N 个点。其中每⼀个点的初始坐标记作 (p_i = [x, y, z]) 。每个点还有自己的固定灰度值,我们用 16 个数来描述,这 16 个数为该点周围 4x4的小块读数,记作 (I(p)_i),顺序见图 1 。换句话说,小块从 u − 2, v − 2 取到 u + 1, v + 1,先迭代 v。那么,我们知道,可以把每个点投影到每个图像中,然后再看投影后点周围小块与原始的 4x4 小块有多大差异。那么,整体优化目标函数为:
即最小化任意点在任意图像中投影与其本⾝颜⾊之差。其中K 为相机内参(在程序内以全局变量形式给定),(pi)为投影函数,(W) 指代整个patch。下面,请回答:
1. 如何描述任意一点投影在任意⼀图像中形成的error?
答:
2. 每个error 关联几个优化变量?
答:每个error关联两个优化变量 分别是相机的李代数姿态(xi)(6自由度),三维空间点坐标(P = X,Y,Z)(3个自由度)。
3. error 关于各变量的雅可比是什么?
答:
error关于空间点坐标P(X,Y,Z)的导数为对应点的像素梯度,即

3.2 实现
下⾯,请你根据上述说明,使⽤ g2o 实现上述优化,并⽤ pangolin 绘制优化结果。程序框架见 code/di-rectBA.cpp ⽂件。实现过程中,思考并回答以下问题:
1. 能否不要以 ([x, y, z]^T) 的形式参数化每个点?
答:可以,还可以使用逆深度的方法来参数化路标点。
2. 取 4x4 的 patch 好吗?取更大的 patch 好还是取小⼀点的 patch 好?
答:4*4的patch挺好,太小的patch不能反应真正的光度变化。固定场景的话可能更大ー点好,但会增加运算量。
3. 从本题中,你看到直接法与特征点法在 BA 阶段有何不同?
答:计算误差的方式不同,特征点法在BA阶段最小化的时特征点的重投影误差,直接法最小化的是像素点块的光度误差;因此其雅可比计算也不一样。
4. 由于图像的差异,你可能需要鲁棒核函数,例如 Huber。此时 Huber 的阈值如何选取?
答:在实践过程中,采用控制变量法对阈值可以做多次测验,取误差最小的阈值作为Huber的阈值。根据经验来确定。
假设误差项是高斯分布的,则误差项的平方服从卡方分布,然后确定误差项的自由度,以及置信度,根据自由度和置信度查找卡方分布表就能知道阈值是多少,一般置信度假设0.95
提示:
-
构建 Error 之前先要判断点是否在图像中,去除⼀部分边界的点。
-
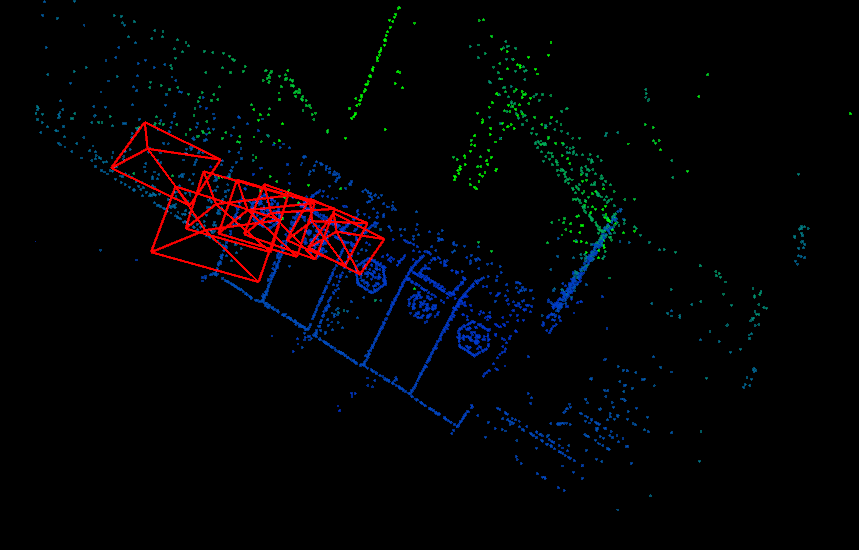
优化之后,Pangolin 绘制的轨迹与地图如图 1 所示。
-
你也可以不提供雅可比的计算过程,让 g2o 自己计算⼀个数值雅可比。
-
以上数据实际取⾃ DSO[1]。
最后:
优化前截图:
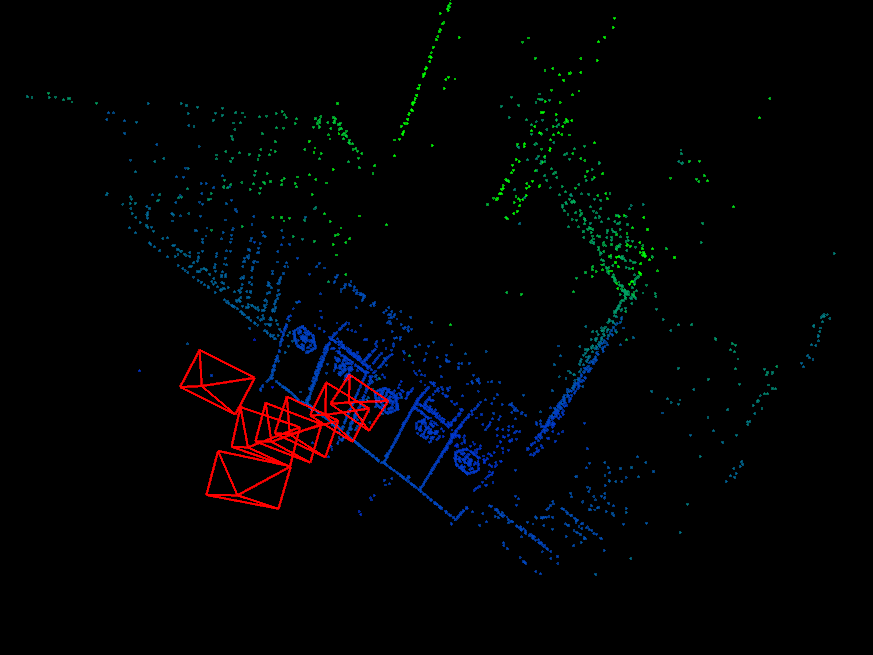
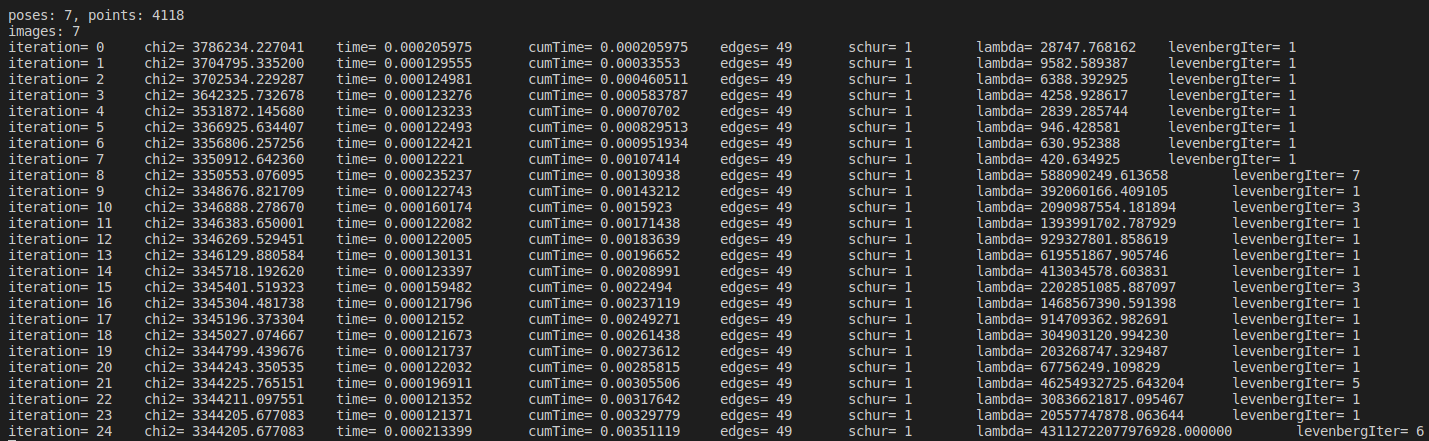
Terminal截图如下所示:
使用pangolin画出的点云图如下所示:


当注释掉鲁棒核函数时,结果如下:
只能优化4次

- 在测试过程中发现,让g2o自己计算雅克比的效果并不好。