http://www.vision.caltech.edu/bouguetj/calib_doc/index.html#examples
文档中举了几个例子,有关双目的是第5个,
这个例子展示了如何使用工具箱用于校准一个立体系统(内在和外在)和使用立体标定的结果为立体图像校正和3 d立体三角测量。
下载stereo_example.zip立体数据集,包含14对对应的左右图像。图片命名left01.jpg,…,left14.jpg和right01.jpg…,right14.jpg。这个包包含分别的两个校准结果文件Calib_Results_left和Calib_Results_right(使用第一个例子描述的标准程序校准后产生两个摄像头的校准结果)
在命令行窗口输入stereo_gui运行立体标定工具箱。如下图:
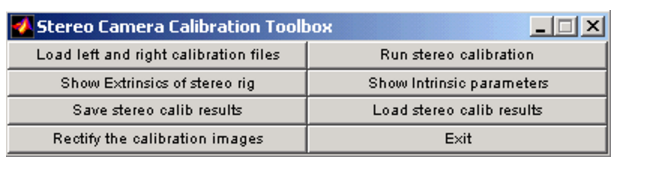
把Calib_Results_left.mat和Calib_Results_right.mat两个文件放到你现在运行的文件夹下)
点击第一个按钮:然后按提示输入
在单击按钮 Run stereo calibration运行全局立体优化程序
最后,点击Rectify the calibration images通过校正来校准立体图像。所有图像left_rectified01.bmp, right_rectified01.bmp,...,left_rectified14.bmp,right_rectified14.bmp都被校准(外极线与水平扫描线匹配)。除生成这些校正图片之外,脚本还保存新设置的校准参数到Calib_Results_stereo_rectified.mat。