开始之前
在上一篇我们实现了读取噪声图像, 然后 进行三种形式的均值滤波得到结果, 由于我们自己写的均值滤波未作边缘处理, 所以效果有一定的下降, 但是总体来说, 我们得到的结果能够说明我们的算法执行之后得到的图像噪声更低, 图像更清晰. 但是也会造成图像的模糊, 导致部分细节丢失. 在这一章中,我们介绍一下中值滤波及其实现
摘要
首先介绍了中值滤波的原理, 给出其实现思路,并根据思路实现了 C++ 的代码, 然后 同样测试 opencv 自带的中值滤波, 同样的测试图像, 得到对比结果, 分析代码的实现过程, .
正文
中值滤波原理
中值滤波(Media Filter)就是对于图像的每一个点计算其邻域窗口的像素序列中值, 可以表示为:
核心就是将相应窗口内的像素值进行排列, 我们之前也说过, 我们选择的窗口为奇数尺寸, 所以我们能够保证窗口内的像素个数也是奇数个, 这样我们可以保证取得唯一的中值, 相应的设置为该点的目标值就行了.
C++ 实现中值滤波
我们来实现一下, 这方面还是能够找到不少结果的, 感觉这个博主写的还是很不错的,有兴趣的可以看下数字图像处理------中值滤波,还有图像处理之中值滤波介绍及C实现, 或者 中值滤波器(Median filter)特性及其实现, 这里我就不再造轮子了, 我们来看下 C++的实现
, 主要参考 第一篇文章, 可以看下效果
这里有一点点需要讨论的, 对于彩色图像的三个通道怎么处理, 自己的思路就是分成三个通道进行处理, 然后分别得到三个图之后进行合并三个通道, 得到结果图像. 查了下 目测大家都是这么做的, 可以看OpenCV 彩色图像的自适应中值滤波 C++ 和 彩色图像空间滤波(MATLAB) 这两篇文章, 思路都是一样的, 我们来实现一下.
//中值滤波:C++ 代码实现 // 处理单通道图像 // 参考 https://www.cnblogs.com/ranjiewen/p/5699395.html
cv::Mat medianFilterGray(const cv::Mat &src, int ksize = 3)
{
cv::Mat dst = src.clone();
//0. 准备:获取图片的宽,高和像素信息,
const int num = ksize * ksize;
std::vector<uchar> pixel(num);
//相对于中心点,3*3领域中的点需要偏移的位置
int delta[3 * 3][2] = {
{ -1, -1 }, { -1, 0 }, { -1, 1 }, { 0, -1 }, { 0, 0 }, { 0, 1 }, { 1, -1 }, { 1, 0 }, {1, 1}
};
//1. 中值滤波,没有考虑边缘
for (int i = 1; i < src.rows - 1; ++i)
{
for (int j = 1; j < src.cols - 1; ++j)
{
//1.1 提取领域值 // 使用数组 这样处理 8邻域值 不适合更大窗口
for (int k = 0; k < num; ++k)
{
pixel[k] = src.at<uchar>(i+delta[k][0], j+ delta[k][1]);
}
//1.2 排序 // 使用自带的库及排序即可
std::sort(pixel.begin(), pixel.end());
//1.3 获取该中心点的值
dst.at<uchar>(i, j) = pixel[num / 2];
}
}
return dst;
}
思路还是那个思路, 不过在写的过程中, 我在想, 能不能直接处理彩色的图像呢, 对于彩色图像最麻烦的地方就是排序了, 我们没办法考虑颜色的高低值, 所以 那我们自定义一个比较函数应该就行了吧. 我们使用三个颜色的和值 做比较
这里使用了C++ 的sort 自定义函数的方法, 这边采用的比较函数的方式, 还有别的方式实现两个元素的比较, 可以参考c++中vector自定义排序的问题
// 自定义两个像素的比较函数, // 使用和值 排序
bool comp(const cv::Vec3b &p1, const cv::Vec3b &p2)
{
return (p1[0] + p1[1] + p1[2]) < (p2[0] + p2[1] + p2[2]);
}
// 尝试彩色图像, 中值排序使用三个通道的和排序
cv::Mat medianFilterColor(const cv::Mat &src, int ksize = 3)
{
cv::Mat dst = src.clone();
//0. 准备:获取图片的宽,高和像素信息,
const int num = ksize * ksize;
std::vector<cv::Vec3b> pixel(num);
//相对于中心点,3*3领域中的点需要偏移的位置
int delta[3 * 3][2] = {
{ -1, -1 }, { -1, 0 }, { -1, 1 }, { 0, -1 }, { 0, 0 }, { 0, 1 }, { 1, -1 }, { 1, 0 }, {1, 1}
};
//1. 中值滤波,没有考虑边缘
for (int i = 1; i < src.rows - 1; ++i)
{
for (int j = 1; j < src.cols - 1; ++j)
{
//1.1 提取领域值 // 使用数组 这样处理 8邻域值 不适合更大窗口
for (int k = 0; k < num; ++k)
{
pixel[k] = src.at<cv::Vec3b>(i + delta[k][0], j + delta[k][1]);
}
//1.2 排序 // 使用自定义的排序函数排序彩色图像
std::sort(pixel.begin(),pixel.end(),comp);
//1.3 获取该中心点的值
dst.at<cv::Vec3b>(i, j) = pixel[num / 2];
}
}
return dst;
}
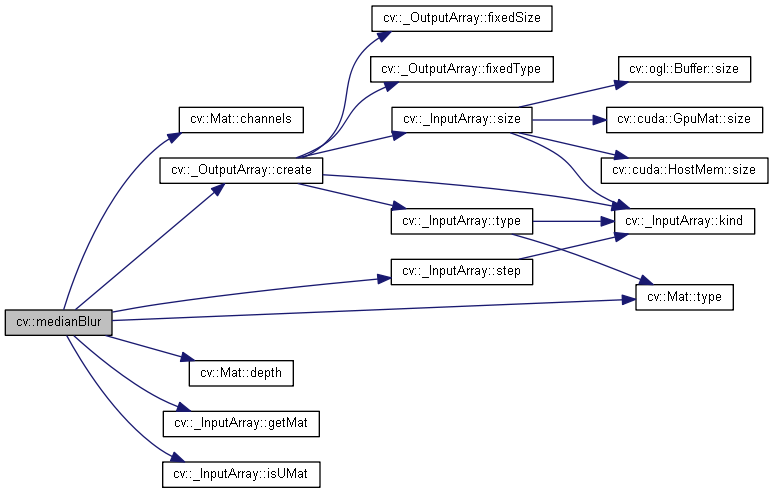
opencv 中值滤波
这里还是之前的方法, 一样的接口, 实现起来很简单, opencv 提供的 函数还是很丰富的, 很厉害
// opencv 中值滤波
cv::Mat mediaFilterDefault(const cv::Mat &src, int ksize = 3)
{
cv::Mat dst;
cv::medianBlur(src, dst, ksize);
return dst;
}
中值滤波算法对比
我们这里就跟之前均值算法的计算很相似了, 我们已经写了三种算法的实现, 然后测试就好了, 趁着功夫, 将上一章一直重复的两个图比较并输出参数的部分写成了一个函数
// 对比两个图像 然后输出 参数信息
QString compareImages(const cv::Mat &I1,
const cv::Mat &I2,
const QString str = "noise",
const QString str_temp = "image-%1: psnr:%2, mssim: B:%3 G:%4 R:%5")
{
double psnr_ = getPSNR(I1, I2);
cv::Scalar mssim_ = getMSSIM(I1, I2);
// 根据 输出模板 生成参数信息
QString res_str = str_temp.arg(str)
.arg(psnr_)
.arg(mssim_.val[0])
.arg(mssim_.val[1])
.arg(mssim_.val[2]);
return res_str;
// cv::imwrite(IMAGE_DIR + "dst_" + std::to_string(i + 1) + ".png", dst[i]);
}
没什么难度, 就是用来拼接一个字符串, 用来显示在界面上, 或者 输出输出来,
这样的我们就能很容易的去写测试的函数了, 三种方法依次去实现, 比较麻烦的是第一种, 需要将彩色图像分成三个通道的灰度图像, 然后分别进行中值滤波, 最后合并结果,得到结果图像.
void MainWindow::testFunc2(void)
{
// 测试 中值 滤波 三种方式的不同
const int TEST = 1; // 使用统一的图进行测试 暂时使用 高 椒盐噪声图像
QString res_str;
// 噪声图像的参数值
res_str = compareImages(gSrcImg, gNoiseImg[TEST]);
ui->pt_log->appendPlainText(res_str);
cv::Mat test_img = gNoiseImg[TEST];
cv::Mat dst[3];
// 测试 中值滤波 拆分三个通道进行中值滤波然后合并图像
std::vector<cv::Mat> bgr(3);
cv::split(test_img, bgr);
bgr[0] = medianFilterGray(bgr[0]);
bgr[1] = medianFilterGray(bgr[1]);
bgr[2] = medianFilterGray(bgr[2]);
cv::merge(bgr, dst[0]); // 第一种方式
dst[1] = medianFilterColor(test_img); // 第二种 彩色直接 计算中值滤波
dst[2] = mediaFilterDefault(test_img); // opencv 实现 中值滤波
// 分别计算三种方式得到的滤波的效果 (结果图与 原始图比较)
for(int i=0;i<3;i++)
{
res_str = compareImages(gSrcImg, dst[i]);
// 噪声的参数值
ui->pt_log->appendPlainText(res_str);
cv::imwrite(IMAGE_DIR + "dst_media_" + std::to_string(i+1)+".png",dst[i]);
}
}
我们仍然选择高椒盐噪声图像用于测试, 先看下结果, 分别对应噪声图的参数, 以及三种方法进行的参数结果.
第三行的结果就是我们进行自定义排序的图像处理,
image-noise: psnr:19.4727, mssim: B:0.353134 G:0.383638 R:0.629353
image-noise: psnr:33.3725, mssim: B:0.896859 G:0.915976 R:0.912563
image-noise: psnr:31.2668, mssim: B:0.866162 G:0.901717 R:0.879337
image-noise: psnr:34.3125, mssim: B:0.902338 G:0.921419 R:0.91531
我们看一下结果图像, 原始图像可以看 https://gitee.com/schen00/BlogImage/raw/master/image/1588468343599.png 这里,
{kind=link}
gitee 限制了 1M 以上的图的显示, 所以有需要的去看这个就好.
最近一直用的图拼接使用的 做好图 在线拼接图片 主要是懒得自己写了, http://www.zuohaotu.com/image-merge.aspx 链接在这里了 有需要自取

这里的第一副图是噪声图像, 第二副是我们拆分通道处理后拼接起来了的, 没有处理边缘的细节问题, 第三章图就是我们进行自定义中值排序得到的图, 部分点处理不掉 甚至还复制了出来, 不过整体效果还是不错的, 第四章图就是opencv 自带的中值滤波的处理.
中值滤波算法优化
类似均值滤波, 处理的时候考虑变化了的边界就好了, 那中值滤波怎么优化呢, 感觉这一块做的人还挺多, 中值滤波的优化主要是使用自适应中值滤波, 和在中值滤波的方法上进行加速运算,
自适应中值滤波
可以参考自适应中值滤波及实现, 我感觉介绍的还是比较详细的, 主要的思路就是如果噪声比较严重时, 窗口获取到的中值可能是噪声值, 这时候增大窗口, 然后重新进行中值滤波,直到找到比较符合的中值.
引用他给出的部分叙述
在自适应中值滤波算法中,A步骤里面会先判断是否满足 (Zmin<Zmed<ZmaxZmin<Zmed<Zmax)。这一步骤实质是判断当前区域的中值点是否是噪声点,通常来说是满足 (Zmin<Zmed<ZmaxZmin<Zmed<Zmax) 这个条件的,此时中值点不是噪声点,跳转到B;考虑一些特殊情况,如果 (Zmed=ZminZmed=Zmin或者Zmed=ZmaxZmed=Zmax) ,则认为是噪声点,应该扩大窗口尺寸,在一个更大的范围内寻找一个合适的非噪声点,随后再跳转到B,否则输出的中值点是噪声点;
接下来考虑跳转到B之后的情况:判断中心点的像素值是否是噪声点,判断条件为 (Zmin<Zxy<ZmaxZmin<Zxy<Zmax),原理同上,因为如果(Zxy=ZminZxy=Zmin)或者(Zxy=ZmaxZxy=Zmax),则认为是噪声点。如果不是噪声点,我们可以保留当前像素点的灰度值;如果是噪声点,则使用中值替代原始灰度值,滤去噪声。
同样的, 图像处理基础(2):自适应中值滤波器(基于OpenCV实现), 这篇文章写的更好一点, 并给出了 opencv 的实现代码, 我们来看一下
// 自适应中值滤波窗口实现 // 图像 计算座标, 窗口尺寸和 最大尺寸
uchar adaptiveProcess(const Mat &im, int row, int col, int kernelSize, int maxSize)
{
std::vector<uchar> pixels;
for (int a = -kernelSize / 2; a <= kernelSize / 2; a++)
for (int b = -kernelSize / 2; b <= kernelSize / 2; b++)
{
pixels.push_back(im.at<uchar>(row + a, col + b));
}
sort(pixels.begin(), pixels.end());
auto min = pixels[0];
auto max = pixels[kernelSize * kernelSize - 1];
auto med = pixels[kernelSize * kernelSize / 2];
auto zxy = im.at<uchar>(row, col);
if (med > min && med < max)
{
// to B
if (zxy > min && zxy < max)
return zxy;
else
return med;
}
else
{
kernelSize += 2;
if (kernelSize <= maxSize)
return adaptiveProcess(im, row, col, kernelSize, maxSize); // 增大窗口尺寸,继续A过程。
else
return med;
}
}
// 自适应均值滤波
cv::Mat adaptiveMediaFilter(const cv::Mat &src, int ksize = 3)
{
int minSize = 3; // 滤波器窗口的起始尺寸
int maxSize = 7; // 滤波器窗口的最大尺寸
cv::Mat dst;
// 扩展图像的边界
cv::copyMakeBorder(src, dst, maxSize / 2, maxSize / 2, maxSize / 2, maxSize / 2, cv::BorderTypes::BORDER_REFLECT);
// 图像循环
for (int j = maxSize / 2; j < dst.rows - maxSize / 2; j++)
{
for (int i = maxSize / 2; i < dst.cols * dst.channels() - maxSize / 2; i++)
{
dst.at<uchar>(j, i) = adaptiveProcess(dst, j, i, minSize, maxSize);
}
}
cv::Rect r = cv::Rect(cv::Point(maxSize / 2, maxSize / 2), cv::Point(dst.rows-maxSize / 2, dst.rows-maxSize / 2));
cv::Mat res = dst(r);
return res;
}
我们这里还是使用的分离三个通道然后进行自适应均值滤波, 参数就使用默认的3, 最大窗口设为7, 我们测试还是跑的之前的高椒盐噪声图像, 下面给出的最后一行就是我们使用自适应中值滤波得到的结果, 至少从 psnr 的参数上我们能看到图像质量的提升, 我们给出图像结果, 肉眼上能看出稍微一点的区别, 对比之前的已经完全不存在白点了, 图像已经比较接近真实图像了..
// 拆分三个通道 计算自适应中值滤波
cv::split(test_img, bgr);
for (int i = 0; i < 3; i++)
bgr[i] = adaptiveMediaFilter(bgr[i]);
cv::merge(bgr, dst[3]);
image-noise: psnr:19.4727, mssim: B:0.353134 G:0.383638 R:0.629353
image-noise: psnr:33.3725, mssim: B:0.896859 G:0.915976 R:0.912563
image-noise: psnr:31.2655, mssim: B:0.86636 G:0.901517 R:0.879384
image-noise: psnr:34.3125, mssim: B:0.902338 G:0.921419 R:0.91531
image-noise: psnr:37.4024, mssim: B:0.946158 G:0.958146 R:0.953884

中值滤波计算加速
由于中值滤波无论多大的窗口都是用来将窗口内的像素进行排序, 这里的优化有两个方向 一个是窗口的优化, 一个计算的加速,
我真的 imageshop 的这篇文章 任意半径中值滤波(扩展至百分比滤波器)O(1)时间复杂度算法的原理、实现及效果。
已经写的比较完全了, 我都不想在写了,
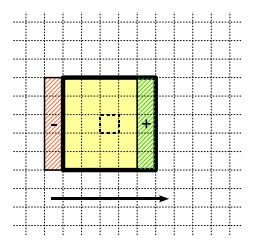
再从中值滤波的快速算法 偷一张图,
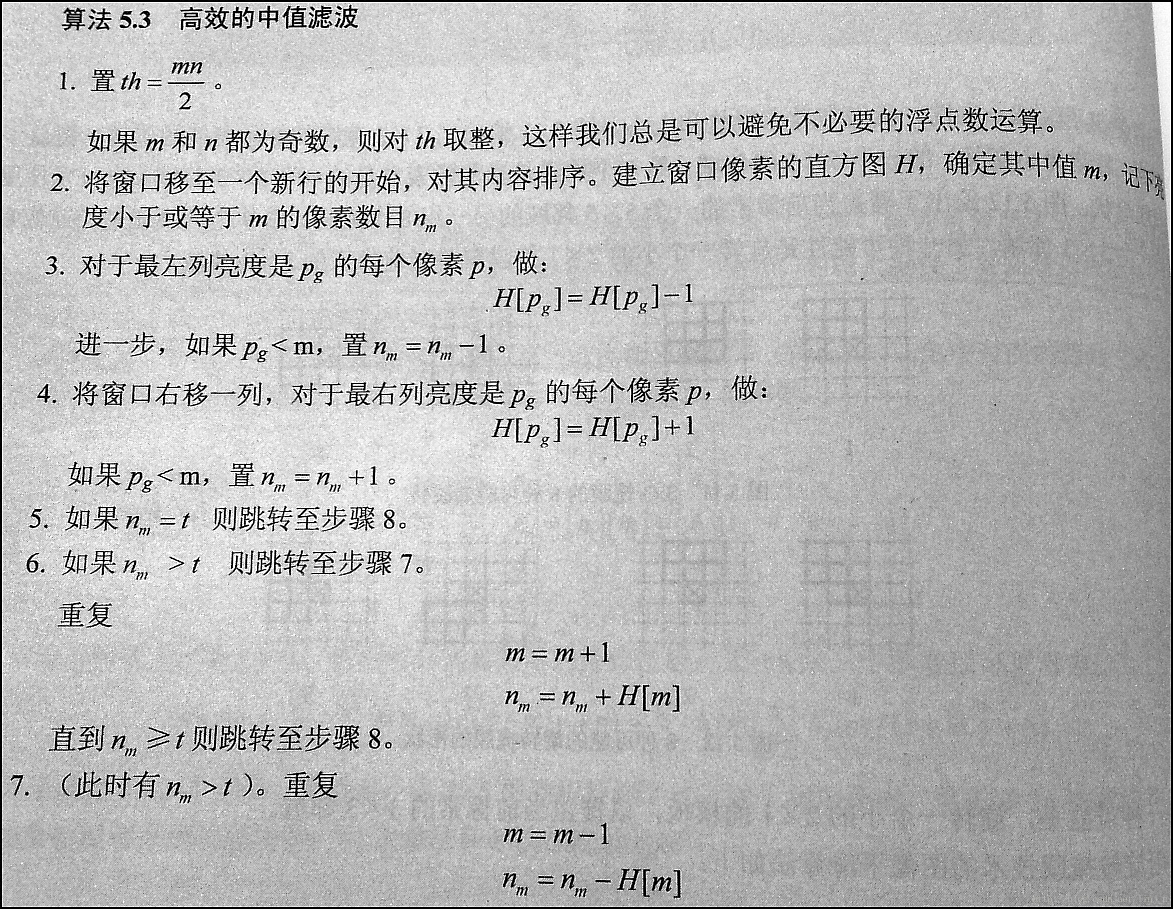
感兴趣的可以看一下的链接
OpenCV源码分析(四):中值滤波 这里详细介绍了 opencv 中怎么实现的 中值滤波
总结
算是从中值滤波的基础上做了一个开始, 介绍了一下中值滤波的原理, 然后根据原理使用C++ 进行了实现, 之后再进行 opencv 的实现, 然后我们根据之前的程序上加入了中值滤波的实现效果, 最后在中值滤波的基础上进行优化, 做了自适应中值滤波的实现,测试发现结果还要更好, 最后我稍微提了一下中值滤波的优化加速, 这一块做的很多, 可以去参考里面去找, 算是完成了中值滤波的章节, 如果这里搞懂了我再来完善这一章节..
参考
- 《绘制函数调用图(call graph)(4):doxygen + graphviz_运维_许振坪的专栏-CSDN博客》. 见于 2020年5月2日. https://blog.csdn.net/benkaoya/article/details/79763668.
- 《任意半径中值滤波(扩展至百分比滤波器)O(1)时间复杂度算法的原理、实现及效果。 - Imageshop - 博客园》. 见于 2020年5月3日. https://www.cnblogs.com/Imageshop/archive/2013/04/26/3045672.html.
- 《数字图像处理------中值滤波 - ranjiewen - 博客园》. 见于 2020年5月2日. https://www.cnblogs.com/ranjiewen/p/5699395.html.
- 《【算法随记三】小半径中值模糊的急速实现(16MB图7.5ms实现) + Photoshop中蒙尘和划痕算法解读。 - Imageshop - 博客园》. 见于 2020年5月3日. https://www.cnblogs.com/Imageshop/p/11087804.html.
- 《图像处理基础(2):自适应中值滤波器(基于OpenCV实现) - Brook_icv - 博客园》. 见于 2020年5月3日. https://www.cnblogs.com/wangguchangqing/p/6379646.html.
- 《图像处理之原理 - 中值滤波 - tanfy - 博客园》. 见于 2020年5月2日. https://www.cnblogs.com/tanfy/p/median_filter.html.
- 《图像处理之中值滤波介绍及C实现 - 淇淇宝贝 - 博客园》. 见于 2020年5月2日. https://www.cnblogs.com/qiqibaby/p/5281743.html.
- 《中值滤波的快速算法_网络_LinJM-机器视觉-CSDN博客》. 见于 2020年5月3日. https://blog.csdn.net/linj_m/article/details/35780163.
- 《中值滤波器》. 收入 维基百科,自由的百科全书, 2017年9月8日. https://zh.wikipedia.org/w/index.php?title=中值滤波器&oldid=46098815.
- 《中值滤波器(Median filter)特性及其实现_人工智能_Ivan 的专栏-CSDN博客》. 见于 2020年5月2日. https://blog.csdn.net/liyuanbhu/article/details/48502005.
- 《自适应中值滤波及实现_人工智能_hongbin_xu的博客-CSDN博客》. 见于 2020年5月3日. https://blog.csdn.net/hongbin_xu/article/details/79780967.
- GitHub. 《ARM-Software/ComputeLibrary》. 见于 2020年5月3日. https://github.com/ARM-software/ComputeLibrary.
- 《c++中vector自定义排序的问题_C/C++_Stone_Sky-CSDN博客》. 见于 2020年5月2日. https://blog.csdn.net/aastoneaa/article/details/8471722.
- 《OpenCV 彩色图像的自适应中值滤波 C++_人工智能_cyf15238622067的博客-CSDN博客》. 见于 2020年5月3日. https://blog.csdn.net/cyf15238622067/article/details/88718615.
- 《opencv: Image Filtering》. 见于 2020年5月3日. http://schen.xyz:89/opencv/d4/d86/group__imgproc__filter.html#gad7c87bbc46b97e7eafa71357916ab568.
- 知乎专栏. 《OpenCV图像处理专栏九 | 基于直方图的快速中值滤波算法》. 见于 2020年5月3日. https://zhuanlan.zhihu.com/p/98092747.
- 简书. 《OpenCV源码分析(四):中值滤波》. 见于 2020年5月2日. https://www.jianshu.com/p/eb0b856286f2.
本文由博客一文多发平台 OpenWrite 发布!