简单的手势识别,基本思路是基于皮肤检测,皮肤的颜色在HSV颜色空间下与周围环境的区分度更高,从RGB转换到HSV颜色空间下针对皮肤颜色进行二值化,得到mask:
def HSVBin(img): hsv = cv2.cvtColor(img,cv2.COLOR_RGB2HSV) lower_skin = np.array([100,50,0]) upper_skin = np.array([125,255,255]) mask = cv2.inRange(hsv,lower_skin,upper_skin) return mask
其中:
cvtColor用于颜色空间转换。
inRange中,lower指图像中低于这个值,图像值会变成0;upper指图像中高于这个值,图像值会变成0,而在这之间的值变为255。
然后通过腐蚀与膨胀等形态学变化去除一些噪点,得到更完整的白色(皮肤)色块,最后找出色块的轮廓,并通过色块大小排除一些面积较小的噪点:
def getContours(img): kernel = np.ones((5,5),np.uint8) closed = cv2.morphologyEx(img,cv2.MORPH_OPEN,kernel) closed = cv2.morphologyEx(closed,cv2.MORPH_CLOSE,kernel) _,contours,h = cv2.findContours(closed,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE) vaildContours = [] for cont in contours: if cv2.contourArea(cont)>9000: vaildContours.append(cv2.convexHull(cont)) return vaildContours
膨胀:dilate,进行膨胀操作时,将内核 B划过图像,将内核B覆盖区域的最大像素值提取,并代替锚点位置的像素,这一最大化操作会导致图像中的亮区开始“扩展”。
腐蚀:erode,将最小像素值提取原始图片里的一个像素(1或者0)只有在核下的所有像素都是1的时候才被认为是1.否则它就被腐蚀掉了(变成0)。根据核的大小来决定在边界附近的多少像素会被丢弃掉,所以前景物体的厚度或大小会缩小,或者说白色区域会减小。这个在移除小的白色噪点时很有用。
ones(shape[,dtype,order]) 依据一个给定的形状和类型返回一个新的元素全部为1的数组。
data type :uint8 -->range:0~255,一张图片的数据类型默认为unit8
开:腐蚀之后再膨胀的另一个名字。我们使用函数cv2.morphologyEx()。
闭:膨胀之后再腐蚀,在用来关闭前景对象里的小洞或小黑点很有用。
轮廓检测 cv2.findContours,接收参数为二值图。
def main(): cap = cv2.VideoCapture(0) while(cap.isOpened()): ret,img = cap.read() skinMask = HSVBin(img) contours = getContours(skinMask) cv2.drawContours(img,contours,-1,(0,255,0),2) cv2.imshow('capture',img) k = cv2.waitKey(10) if k == 27: break
cv2.waitKey()--waitKey()函数的功能是不断刷新图像,频率时间为delay,单位为ms。返回值为当前键盘按键值。
完整代码如下:
import cv2 import numpy as np def main(): cap = cv2.VideoCapture(0) while(cap.isOpened()): ret,img = cap.read() skinMask = HSVBin(img) contours = getContours(skinMask) cv2.drawContours(img,contours,-1,(0,255,0),2) cv2.imshow('capture',img) k = cv2.waitKey(10) if k == 27: break def getContours(img): kernel = np.ones((5,5),np.uint8) closed = cv2.morphologyEx(img,cv2.MORPH_OPEN,kernel) closed = cv2.morphologyEx(closed,cv2.MORPH_CLOSE,kernel) _,contours,h = cv2.findContours(closed,cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE) vaildContours = [] for cont in contours: if cv2.contourArea(cont)>9000: #x,y,w,h = cv2.boundingRect(cont) #if h/w >0.75: #filter face failed vaildContours.append(cv2.convexHull(cont)) #rect = cv2.minAreaRect(cont) #box = cv2.cv.BoxPoint(rect) #vaildContours.append(np.int0(box)) return vaildContours def HSVBin(img): hsv = cv2.cvtColor(img,cv2.COLOR_RGB2HSV) lower_skin = np.array([100,50,0]) upper_skin = np.array([125,255,255]) mask = cv2.inRange(hsv,lower_skin,upper_skin) #res = cv2.bitwise_and(img,img,mask=mask) return mask if __name__ =='__main__': main()
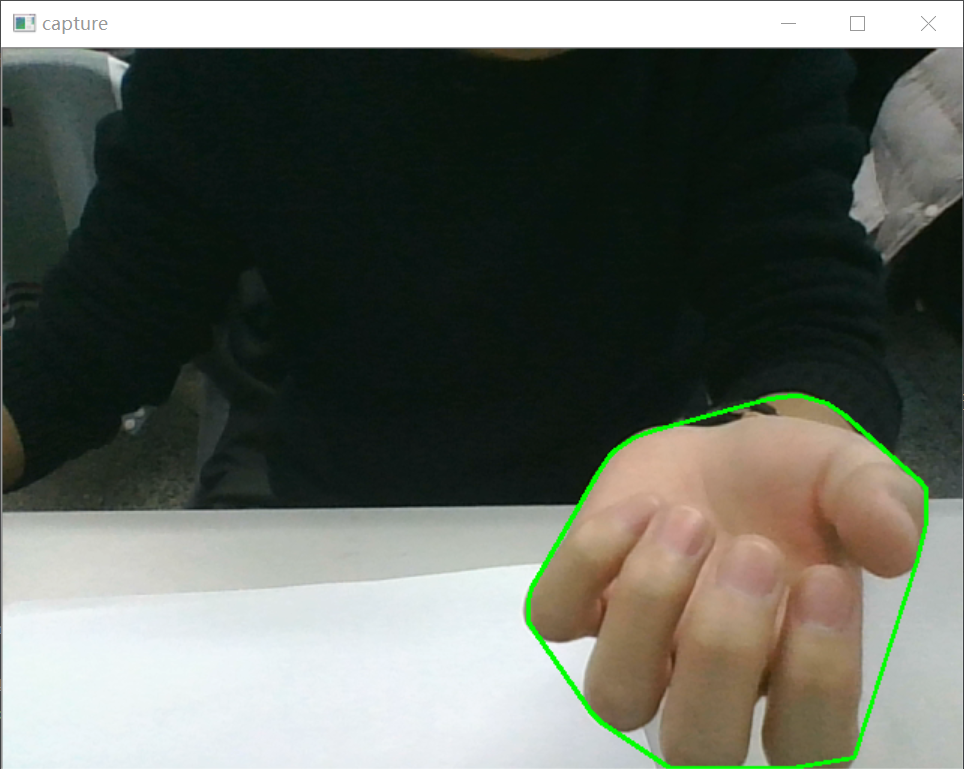
效果: