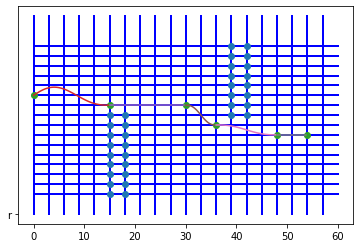
1、A* 中 g,h函数使用两点之间五次样条的弧长,并且根据需要进行微调。
2、五次多项式的末状态为(l,0,0),所以中间过程两点进行连接的时候是水平的,最好的结果还是应该获得各个轨迹点后,再对该轨迹点进行重新拟合。或者在查找的过程中就已经考虑到中间的状态不是水平的。
3、如果模型为低速模型,那这个轨迹应该是可以使用的。
# -*- coding: utf-8 -*- """ Created on Fri Dec 27 11:02:55 2019 @author: leizhen.liu """ from scipy.integrate import quad import numpy as np import matplotlib.pyplot as plt class VehicleState: def __init__(self,s,l,vpl,apl): self.s = s self.l = l self.vpl = vpl self.apl = apl class trajectoryCost: def __init__(self,startVehicleState,endVehicleState,totals,totall,detas,detal): self.startVehicleState = VehicleState(0,0,startVehicleState.vpl,startVehicleState.apl) self.endVehicleState = VehicleState((endVehicleState.s - startVehicleState.s)*detas,(endVehicleState.l - startVehicleState.l)*detal,endVehicleState.vpl,endVehicleState.apl) self.sorg = startVehicleState.s * detas self.lorg = startVehicleState.l * detal self.id = str(startVehicleState.s + startVehicleState.l * totals) + 'id'+ str(endVehicleState.s + endVehicleState.l * totals) self.matP = np.zeros((6,1)) self.arcLength() def calQuintic(self): s = self.endVehicleState.s matS = np.mat([[1,0,0,0,0,0], [0,1,0,0,0,0], [0,0,2,0,0,0], [1,s,s**2,s**3,s**4,s**5], [0,1,2*s,3*s**2,4*s**3,5*s**4], [0,0,2,6*s,12*s**2,20*s**3]]) #ju zhen ni pan duan if np.linalg.det(matS)<0.001: self.matP = np.mat([0,0,0,0,0,0]).T return matL = np.mat([0,self.startVehicleState.vpl,self.startVehicleState.apl, self.endVehicleState.l,self.endVehicleState.vpl,self.endVehicleState.apl]) self.matP = matS.I * matL.T def f(self,s): return np.sqrt(1+ (self.matP[1] +2*self.matP[2]*s+3*self.matP[3]*s**2+4*self.matP[4]*s**3+5*self.matP[5]*s**4)**2) def arcLength(self): self.calQuintic() self.cost,err = quad(self.f,self.startVehicleState.s, self.endVehicleState.s) def show(self): s = list() l = list() print('stop =',self.endVehicleState.s) for i in np.arange(0,self.endVehicleState.s,0.3): s.append(i + self.sorg) sp = np.mat([1,i,i**2,i**3,i**4,i**5]) l0 = sp*self.matP l1 = np.asarray(l0) l.append(l1[0][0] + self.lorg) plt.plot(s,l,'-')
# -*- coding: utf-8 -*- """ Spyder Editor This is a temporary script file. """ import numpy as np import matplotlib.pyplot as plt import math import queue import time import copy import huchang MaxsSearch = 5 detaWidth = 0.3 totalWidth = 6.0 #road width detaLength = 3.0 totalLength = 60.0 # road predict length vehicleHarfWidth = 0.8 # s,l half width,half height /m obstacle = np.array([[40,4,0.3,0.3], [16,1.5,0.6,0.3],#[30,2.5,0.3,0.3] ]) numberOfL = np.int(totalWidth /detaWidth) numberOfS = np.int(totalLength /detaLength) class StrPosition: def __init__(self,s,l,vpl =0.0,apl =0.0): self.s = s self.l = l self.vpl = vpl self.apl = apl class StrReachablePosition: def __init__(self,parentNode,reachNode): self.parentNode = parentNode self.reachNode = reachNode self.f =999 self.g =999 self.h =999 def nodeCost(startPosition,endPosition,node2nodeCost): begin = startPosition.s + startPosition.l*numberOfS end = endPosition.s + endPosition.l*numberOfS if startPosition.s > endPosition.s: begin = copy.deepcopy(end) end = startPosition.s + startPosition.l*numberOfS Position =copy.deepcopy(startPosition) startPosition = copy.deepcopy(endPosition) endPosition = copy.deepcopy(Position) ikey = str(begin) +'id'+str(end) if startPosition.s == 2 and startPosition.l == 11: print('ikey',ikey) if node2nodeCost.get(ikey,0) == 0 : startState = huchang.VehicleState(startPosition.s,startPosition.l,startPosition.vpl,startPosition.apl) endState = huchang.VehicleState(endPosition.s,endPosition.l,endPosition.vpl,endPosition.apl) traject = huchang.trajectoryCost(startState,endState,numberOfS,numberOfL,detaLength,detaWidth) node2nodeCost[ikey] = copy.deepcopy(traject) return node2nodeCost,node2nodeCost[ikey].cost def findInQueue(closeMap,node): ikey = node.reachNode.l * numberOfS + node.reachNode.s if closeMap.get(ikey,0) == 0: return False return True def refreshMap(node,openList): ikey = node.reachNode.l * numberOfS + node.reachNode.s openList[ikey] = node return openList def updateNode(node,openList,closeMap): #print("updateNode-------------",node.reachNode.l,node.reachNode.s) ikey = node.reachNode.l * numberOfS + node.reachNode.s if openList.get(ikey,0) != 0: nodet = openList[ikey] if(nodet.g > node.g): openList[ikey] = node else: if findInQueue(closeMap,node) == False: openList[ikey] = node return copy.deepcopy(openList) def delMap(node,openList): ikey = node.reachNode.l * numberOfS + node.reachNode.s if openList.get(ikey,0) == 0 or ikey == 0: return openList del openList[ikey] return openList def environmentShowGraph(environment,startIndex,endIndex): shape = environment.shape row = shape[0] col= shape[1] os = list() ol = list() for rowi in range(startIndex,endIndex): for coli in range(col): x = np.array([0,col-1]) y = np.array([rowi,rowi]) x1 = np.array([coli,coli]) y1 = np.array([0,(row -1)]) plt.plot(x,y,'b-') plt.plot(x1,y1,'b-') if environment[rowi][coli] >0.1: os.append(coli) ol.append(rowi) plt.plot(os,ol,'o','r') def environmentShow(environment,startIndex,endIndex): shape = environment.shape col= shape[1] os = list() ol = list() for rowi in range(startIndex,endIndex): for coli in range(col): x = np.array([0,totalLength]) y = np.array([rowi*detaWidth,rowi*detaWidth]) x1 = np.array([coli*detaLength,coli*detaLength]) y1 = np.array([0,totalWidth]) plt.plot(x,y,'b-') plt.plot(x1,y1,'b-') if environment[rowi][coli] >0.1: os.append(coli*detaLength) ol.append(rowi*detaWidth) plt.plot(os,ol,'o','r') def createObstacle(environment,obstacle,startIndex,endIndex): eshape = environment.shape erow = eshape[0] ecol= eshape[1] oshape = obstacle.shape for orowi in range(oshape[0]): start_l = math.floor( (obstacle[orowi][1]-obstacle[orowi][2]) / detaWidth) - startIndexOfL end_l = math.ceil((obstacle[orowi][1]+obstacle[orowi][2]) / detaWidth) + startIndexOfL start_s = math.floor(( obstacle[orowi][0] -obstacle[orowi][3])/detaLength) end_s = math.ceil(( obstacle[orowi][0] + obstacle[orowi][3])/detaLength) #print("obstacle s range",start_s,end_s) for obsl_i in range(start_l,end_l+1): for obss_i in range(start_s,end_s+1): if obsl_i>=0 and obsl_i < erow and obss_i >= 0 and obss_i< ecol: environment[obsl_i][obss_i] = 1.0 def createStopPosition(x,startIndexaOfL,endIndexOfL): stopPosition = np.zeros((endIndexOfL - startIndexOfL,2)) for index in range(endIndexOfL-startIndexaOfL): stopPosition[index][0] = x stopPosition[index][1] = index return stopPosition def getHCost(startPosition,endPosition,node2nodeCost): node2nodeCost,cost = nodeCost(startPosition,endPosition,node2nodeCost) cost0 = (startPosition.l - endPosition.l)*detaWidth - (startPosition.s - endPosition.s)*detaLength *0.1 return node2nodeCost,cost + cost0 *0.1 def getGCost(node,endPosition,node2nodeCost): node2nodeCost,cost = nodeCost(node.reachNode,endPosition,node2nodeCost) cost0 = (startPosition.l - endPosition.l)*detaWidth - (startPosition.s - endPosition.s)*detaLength *0.1 return node2nodeCost, node.g + cost+0.01*cost0 def getFCost(node): return node.g+node.h def checkcollision(environment,startPosition,endPosition): minl = min(startPosition.l,endPosition.l) maxl = max(startPosition.l,endPosition.l) mins = min(startPosition.s,endPosition.s) maxs = max(startPosition.s,endPosition.s) for s0 in range(mins,maxs+1): for l0 in range(minl,maxl+1): if environment[l0][s0] >0.1: return False return True def reachPoints(openList,environment,lastNode,stopPosition,closeMap, startIndexOfL,endIndexOfL,node2nodeCost): print("reachPoints-------------") parentNode = lastNode.reachNode nexts = parentNode.s + 1 reachNode = StrPosition(nexts,0) node = StrReachablePosition(parentNode,reachNode) shape = environment.shape node.parentNode = parentNode print("nexts,s of env",nexts , shape[1],numberOfS,numberOfL) maxsearchOfs = min(nexts+MaxsSearch,numberOfS) for s in range(nexts,maxsearchOfs): for l in range(startIndexOfL,endIndexOfL): reachNode.s = s reachNode.l =l if checkcollision(environment,parentNode,reachNode): node.reachNode = reachNode node2nodeCost, node.g = getGCost(lastNode,reachNode,node2nodeCost) node2nodeCost, node.h = getHCost(reachNode,stopPosition,node2nodeCost) node.f = getFCost(node) openList = updateNode(node,openList,closeMap) return openList,node2nodeCost def freshCloseList(node,openList,closeList,closeMap): print("freshCloseList-------------") ikey = node.reachNode.l * numberOfS + node.reachNode.s closeList.put(node) closeMap[ikey] =node.parentNode.l * numberOfS + node.parentNode.s return delMap(node,openList),closeList,closeMap def getMinFFromOpenList(openList): print("getMinFFromOpenList-------------") #find min node start = StrPosition(0,0) end = StrPosition(0,0) noden = StrReachablePosition(start,end) if len(openList) == 0: return noden,False minf =999999 for nodet in openList.items(): if minf >nodet[1].f: minf = nodet[1].f noden = nodet[1] print("min",minf,noden.reachNode.s,noden.reachNode.l) return noden,True def AStart(environment,startPosition,stopPosition,startIndexOfL,endIndexOfL): print("AStart-------------") node2NodeCost = dict() #put startnode to queue node = StrReachablePosition(startPosition,startPosition) node.g = 0 node2NodeCost, node.h = getGCost(node,startPosition,node2NodeCost) node.f = getFCost(node) openList = dict() openList = refreshMap(node,openList) print("dict len",len(openList)) print("reachPosition",node.reachNode.s,node.reachNode.l) time.sleep(1) closeList = queue.Queue() closeMap = dict() #search while node.reachNode.s != stopPosition.s or node.reachNode.l != stopPosition.l and len(openList)!=0: # update reachabe node #print("node.reachNode.s,stopPosition.s,node.reachNode.l,stopPosition.l",node.reachNode.s,stopPosition.s,node.reachNode.l,stopPosition.l) openList,node2NodeCost = reachPoints(openList,environment,node,stopPosition,closeMap,startIndexOfL,endIndexOfL,node2NodeCost) ##------------- ''' if node.reachNode.s == 2 and node.reachNode.l == 7: for nodet in openList.items(): print("openlist",nodet[0],nodet[1].reachNode.s,nodet[1].reachNode.l,nodet[1].f) ''' ##---------------- #time.sleep(5) node,flag = getMinFFromOpenList(openList) if flag == False: print("openlist null") return closeList,closeMap,node2NodeCost,False else: openList,closeList,closeMap = freshCloseList(node,openList,closeList,closeMap) ##------------- #print("closemaplen",len(closeMap)) #for nodet2 in closeMap.items(): # print("closemap",nodet2[0],nodet2[1]) ##---------------- if node.reachNode.s == stopPosition.s and node.reachNode.l == stopPosition.l: return closeList,closeMap,node2NodeCost,True print("openlist null",len(openList)) return closeList, closeMap,node2NodeCost,False def getTrack(closeMap,startPosition,stopPosition): startkey = startPosition.l * numberOfS + startPosition.s endkey = stopPosition.l * numberOfS + stopPosition.s ikey = closeMap[endkey] slist = list() llist = list() track = queue.deque() slist.append(stopPosition.s) llist.append(stopPosition.l) track.append(np.int(endkey)) #print('s,l',endkey,stopPosition.s,stopPosition.l) while ikey != startkey: s = np.int(ikey % numberOfS) l = np.int((ikey - s) / numberOfS) #print('s,l',ikey,s,l) track.append(np.int(ikey)) ikey = closeMap[ikey] slist.append(s) llist.append(l) slist.append(startPosition.s) llist.append(startPosition.l) track.append(np.int(startkey)) #print('s,l',startkey,startPosition.s,startPosition.l) return copy.deepcopy(slist),copy.deepcopy(llist),copy.deepcopy(track) def showTrajackPointGraph(slist,llist): plt.plot(slist,llist,'o') def showTrajackPoint(slist,llist): slistn = list() llistn = list() for s in slist: slistn.append(s*detaLength) print('s',s*detaLength) for l in llist: llistn.append(l*detaWidth) print('l',l*detaWidth) plt.plot(slistn,llistn,'o') def showTrack(track,node2nodeCost): start = track.pop() print('node2nodeCost',len(node2nodeCost)) while len(track) !=0: end = track.pop() key = str(start) + 'id' + str(end) #print('key',start,end) trackvalue = node2nodeCost[key] trackvalue.show() start = end def showCloseList(closeList): while not closeList.empty(): node = closeList.get() plt.plot(node.reachNode.s*detaLength,node.reachNode.l*detaWidth,'r*') def showCloseListGraph(closeList): while not closeList.empty(): node = closeList.get() plt.plot(node.reachNode.s,node.reachNode.l,'r*') if __name__ == '__main__': # vehicle to road region of l startIndexOfL = np.int(vehicleHarfWidth / detaWidth) endIndexOfL = numberOfL - np.int(vehicleHarfWidth / detaWidth) environment = np.zeros((numberOfL,numberOfS)) createObstacle(environment,obstacle,startIndexOfL,endIndexOfL) environmentShow(environment,startIndexOfL,endIndexOfL) #simple end a*-------------------------------------------- startPosition = StrPosition(0,12,0.1,0) stopPosition = StrPosition(18,8) closeList,closeMap,node2NodeCost,Flag = AStart(environment,startPosition,stopPosition,startIndexOfL,endIndexOfL) if Flag == True: slist,llist,track = getTrack(closeMap,startPosition,stopPosition) for t in track: print('result track',t) showTrajackPoint(slist,llist) showTrack(track,node2NodeCost) else: print("no route-----------------") showCloseList(closeList) #multi end a*------------------------------------ ''' stopPosition = createStopPosition(numberOfS-1,startIndexOfL,endIndexOfL) startPosition = StrPosition(0,9) shapeOfEnd = stopPosition.shape for i in range(0,shapeOfEnd[0]): stop = StrPosition(stopPosition[i][0],stopPosition[i][1]) closeList,closeMap,node2NodeCost,Flag = AStart(environment,startPosition,stop,startIndexOfL,endIndexOfL) if Flag == True: slist,llist,track = getTrack(closeMap,startPosition,stop) for t in track: print('result track',t) showTrajackPoint(slist,llist) showTrack(track,node2NodeCost) else: print("no route-----------------") showCloseList(closeList) #showCloseList(closeList) '''