平衡二叉树(Balanced binary tree)是由阿德尔森-维尔斯和兰迪斯(Adelson-Velskii and Landis)于1962年首先提出的,所以又称为AVL树。
定义:平衡二叉树或为空树,或为如下性质的二叉排序树:
(1)左右子树深度之差的绝对值不超过1;
(2)左右子树仍然为平衡二叉树.
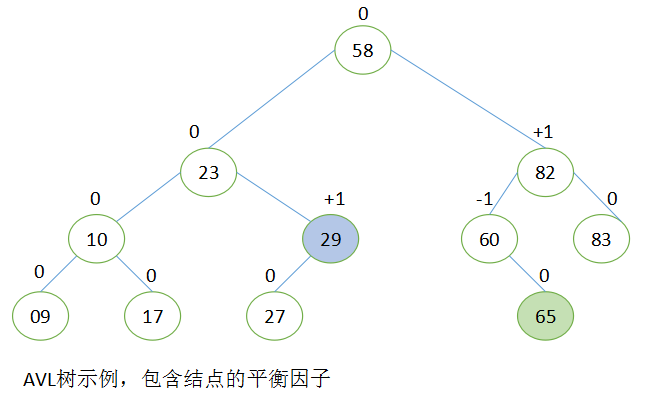
结点的平衡因子 = 左子树的高度 - 右子树的高度, 插入和删除操作都会导致AVL树的自我调整(自我平衡),使得所有结点的平衡因子保持为+1、-1或0。
当子树的根结点的平衡因子为+1时,它是左倾斜的(left-heavy); 当子树的根结点的平衡因子为 -1时,它是右倾斜的(right-heavy)。
一颗子树的根结点的平衡因子就代表该子树的平衡性。保持所有子树几乎都处于平衡状态,AVL树在总体上就能够基本保持平衡。
平衡二叉树每个结点的平衡因子只能是1,0,-1。若其绝对值超过1,则该二叉排序树就是不平衡的。
AVL树的基本查找、插入结点的操作和二叉树的操作一样。但是,当向AVL树中插入一个结点后,还有一些额外的工作要做。首先,必须计算因插入操作对平衡因子带来的改变。其次,如果任何平衡因子变成了+/-2,就必须从这个结点开始往下重新平衡这颗树,这个重新平衡的过程就称为旋转。
AVL树的旋转
旋转操作用来重新平衡树的某个部分。通过重新安排结点 ,使结点之间的关系始终保持左子结点小于父结点,父结点小于右子结点。使得该树仍然是一颗二叉搜索树。旋转过后,旋转子树中的所有结点的平衡因子都为+1、-1或0。
AVL树的旋转类型有4种, 分别是LL(left-left)旋转、LR(left-right)旋转、RR(right-right)旋转和RL(right-left)旋转。
为方便理解在何时执行哪一种旋转,设x代表刚插入AVL树中的结点,设A为离x最近且平衡因子更改为2的绝对值的祖先。可以归纳为下面4种处理情况:
LL旋转
如下图所示,当x位于A的左子树的左子树上时,执行LL旋转。设left为A的左子树,要执行LL旋转,将A的左指针指向left的右子结点,left的右指针指向A,将原来指向A的指针指向left。旋转过后,将A和left的平衡因子都改为0。所有其他结点的平衡因子没有发生变化。

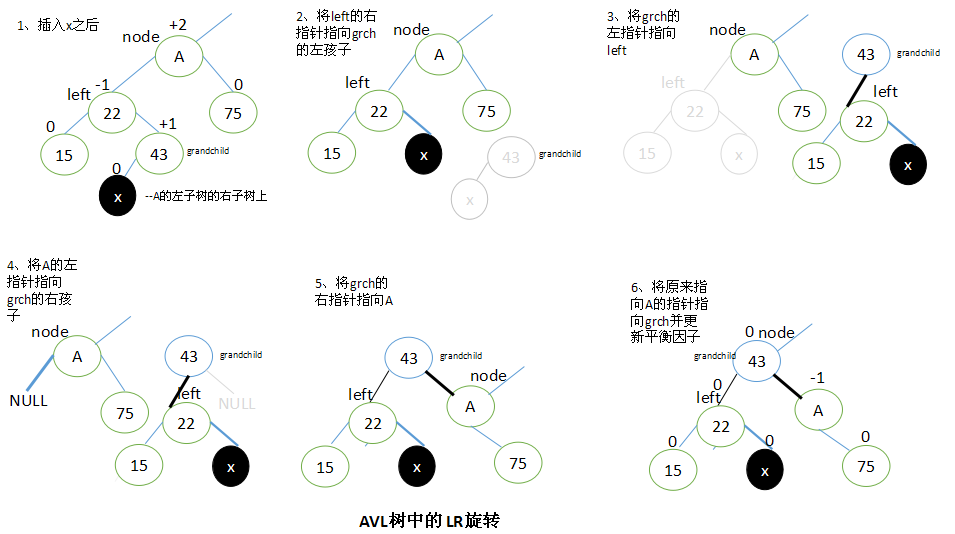
LR旋转
当x位于A的左子树的右子树上时,执行LR旋转。设left是A的左子结点,并设A的子孙结点grandchild为left的右子结点。要执行LR旋转,将left的右子结点指向grandchild的左子结点,grandchild的左子结点指向left,A的左子结点指向grandchild的右子结点,再将grandchild的右子结点指向A,最后将原来指向A的指针指向grandchild。
执行LR旋转之后,调整结点的平衡因子取决于旋转前grandchild结点的原平衡因子值。
如果grandchild结点的原始平衡因子为+1,就将A的平衡因子设为-1,将left的平衡因子设为0。
如果grandchild结点的原始平衡因子为0,就将A和left的平衡因子都设置为0。
如果grandchild结点的原始平衡因子为-1,就将A的平衡因子设置为0,将left的平衡因子设置为+1。
在所有的情况下,grandchild的新平衡因子都是0。所有其他结点的平衡因子都没有改变。
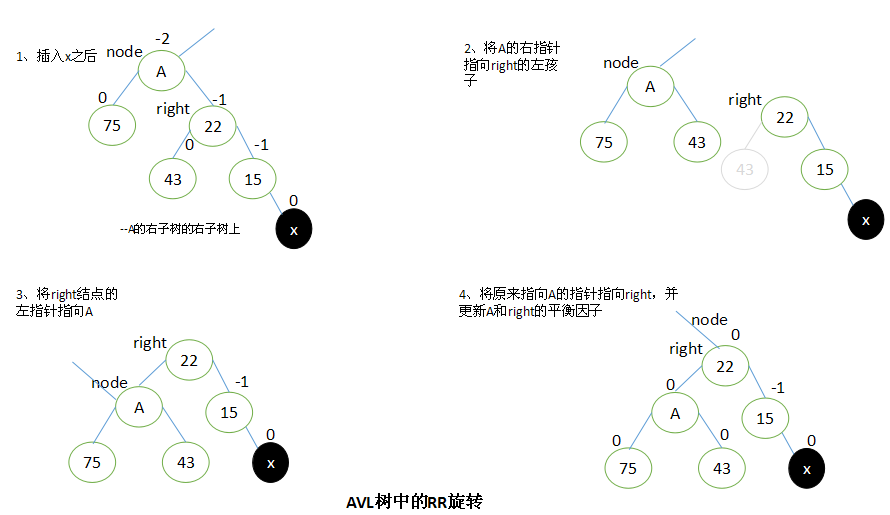
RR旋转
当x位于A的左子树的右子树上时,执行RR旋转。
RR旋转与LL旋转是对称的关系。
设A的右子结点为Right。要执行RR旋转,将A的右指针指向right的左子结点,right的左指针指向A,原来指向A的指针修改为指向right。
完成旋转以后,将A和left的平衡因子都修改为0。所有其他结点的平衡因子都没有改变。
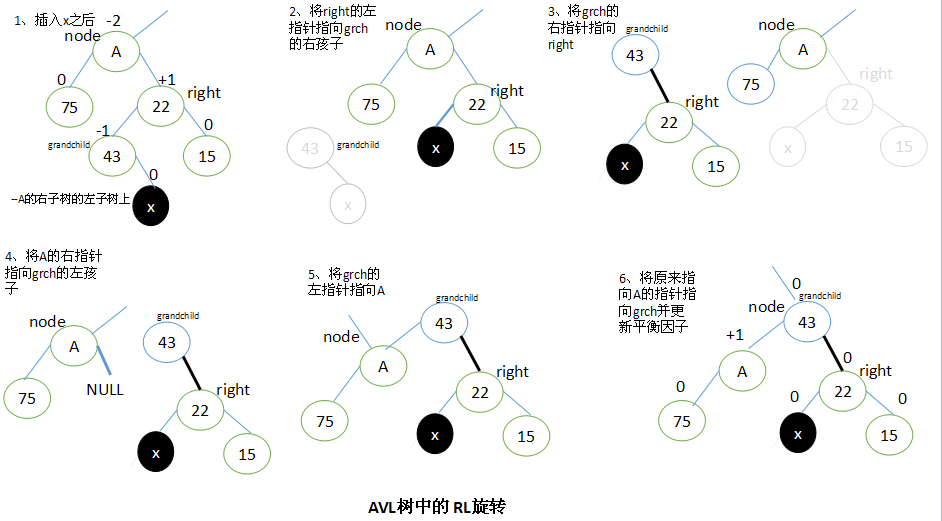
RL旋转
当x位于A的右子树的左子树上时,执行RL旋转。
RL旋转与LR旋转是对称的关系。
设A的右子结点为right,right的左子结点为grandchild。要执行RL旋转,将right结点的左子结点指向grandchild的右子结点,将grandchild的右子结点指向right,将A的右子结点指向grandchild的左子结点,将grandchild的左子结点指向A,最后将原来指向A的指针指向grandchild。
执行RL旋转以后,调整结点的平衡因子取决于旋转前grandchild结点的原平衡因子。这里也有三种情况需要考虑:
如果grandchild的原始平衡因子值为+1,将A的平衡因子更新为0,right的更新为-1;
如果grandchild的原始平衡因子值为 0,将A和right的平衡因子都更新为0;
如果grandchild的原始平衡因子值为-1,将A的平衡因子更新为+1,right的更新为0;
在所有情况中,都将grandchild的新平衡因子设置为0。所有其他结点的平衡因子不发生改变。