1.标准单位
对ROS中所使用的消息(message),推荐使用世界上最广泛运用的标准单位SI。为了确保这一点,REP-0103 也明确了各物理量的单位。例如,长度(Length)使用米(merter)、质量(Mass)使用千克(Kilogram)、时间(Time)使用秒(Second)、电流(Current)使用安培(Ampere)、角度(Angle)使用弧度(Radian)、频率(Frequency)使用赫兹(Hertz)、力(Force)使用牛顿(Newton)、功率(Power)使用瓦(Watt)、电压(Voltage)使用伏特(Volt)、温度(Temperature)使用摄氏度(Celsius)。其他所有单位都是这些单位的组合。
例如,平移速度以米/秒表示,旋转速度以弧度/秒表示。消息鼓励重用ROS提供的方式,但也可以根据需要使用用户全新定义的新的类型的消息。然而,消息用到的单位却必须要遵守使用SI单位,这是为了让其他用户使用这种消息的时候不需要转换单位。
2.坐标表现方式
如图左侧所示,ROS中的旋转轴使用x,y和z轴。正面是x轴的正方向,轴是红色(R)。左边是y轴的正方向,轴用绿色(G)表示。最后,上方是z轴的正方向,轴用蓝色(B)表示。为了便于记忆,您可以将x轴视为食指,将y轴视为中指,将z轴视为拇指。顺序是x、y、z,且颜色是RGB颜色顺序。
机器人的旋转方向是右手定则,用右手卷住的方向是正(+)方向。例如,如果机器人在原地从12点钟方向开始向9点方向旋转,则由于旋转角度的单位用弧度,所以我们说机器人在z轴上旋转+1.5708弧度。
这种坐标表示法在ROS编程中经常使用,必须以x:forward,y:left,z:up的形式进行编程。
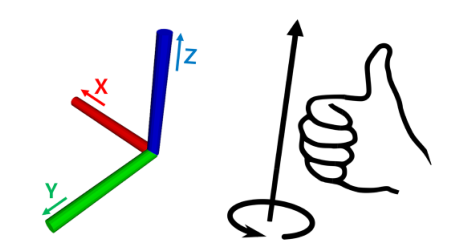
x, y, z轴坐标系和右手定则