1.引言
手臂默认出厂安装了最新固件。 如果您需要更新或重新安装固件,请执行以下步骤。
2.使用演示工具安装
- 在此处下载InterbotiX演示zip文件:下载地址。
- 转到下载的zip文件,然后右键单击->解压,然后选择要提取文件的位置。
- 运行VBdemo.exe
与机器人手臂通信之前,需要将机器人连接到OpenCM9.04控制器。 将最新的固件上传到控制器。 (请注意,默认情况下,套件随U2D2一起提供),因此您需要按照本指南安装OpenCM9.04。
要上传固件,请单击“Upload FW”按钮(请勿打开COM端口)
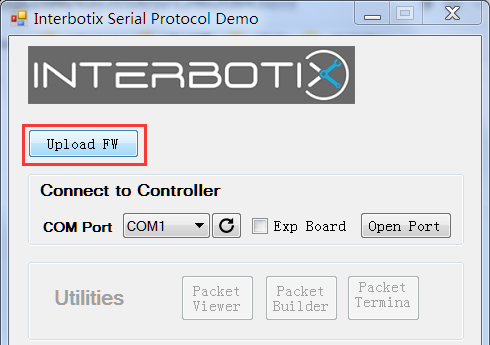
这将打开固件窗口:
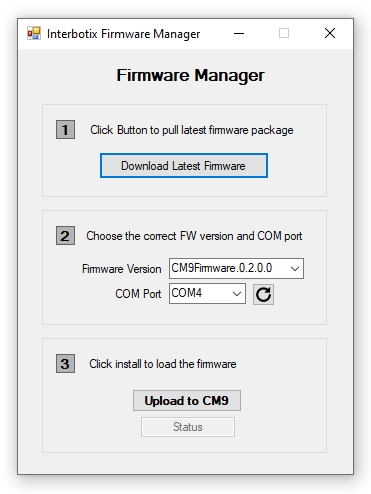
点击“Download Latest Firmware”
在下拉列表中选择最新的固件和正确的COM端口
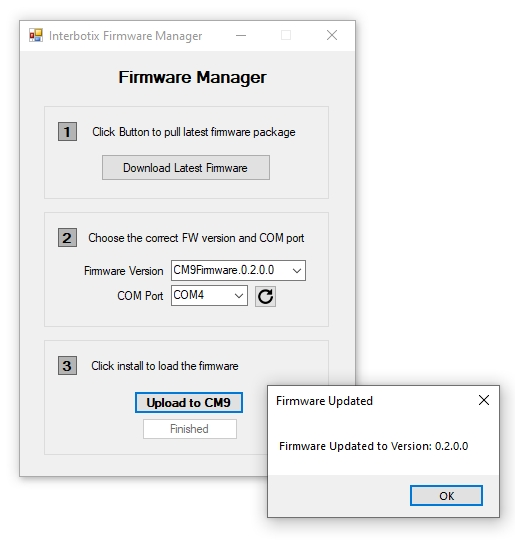
点击"Upload to CM9"按钮
固件上传完成后,您将看到一个完成的屏幕: