电池(从2016年开始)
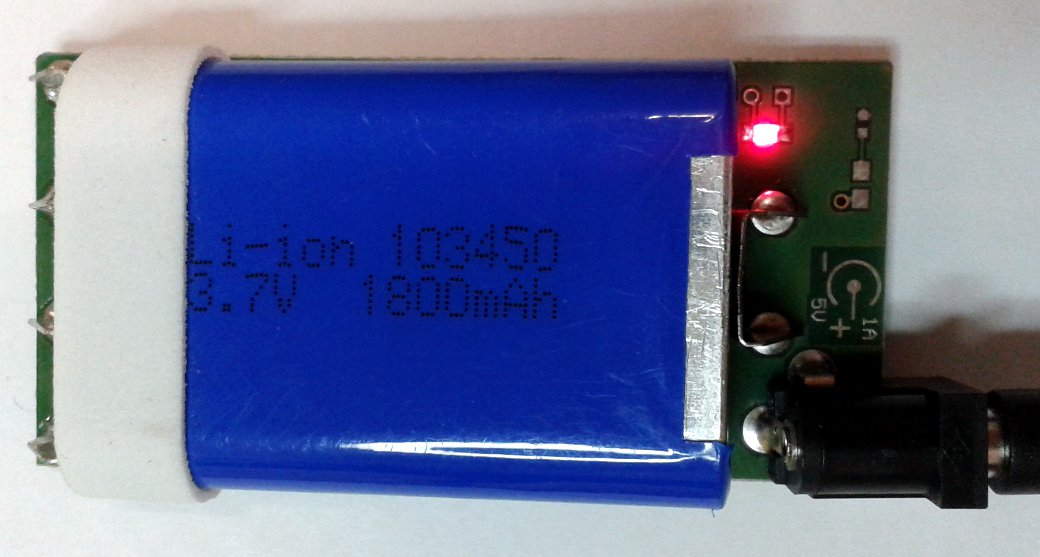
2016年的新电池比较重(38g)但电池容量更大(1800 mAh)。 外观类似于以前的电池,当然它们与机器人和充电器兼容。
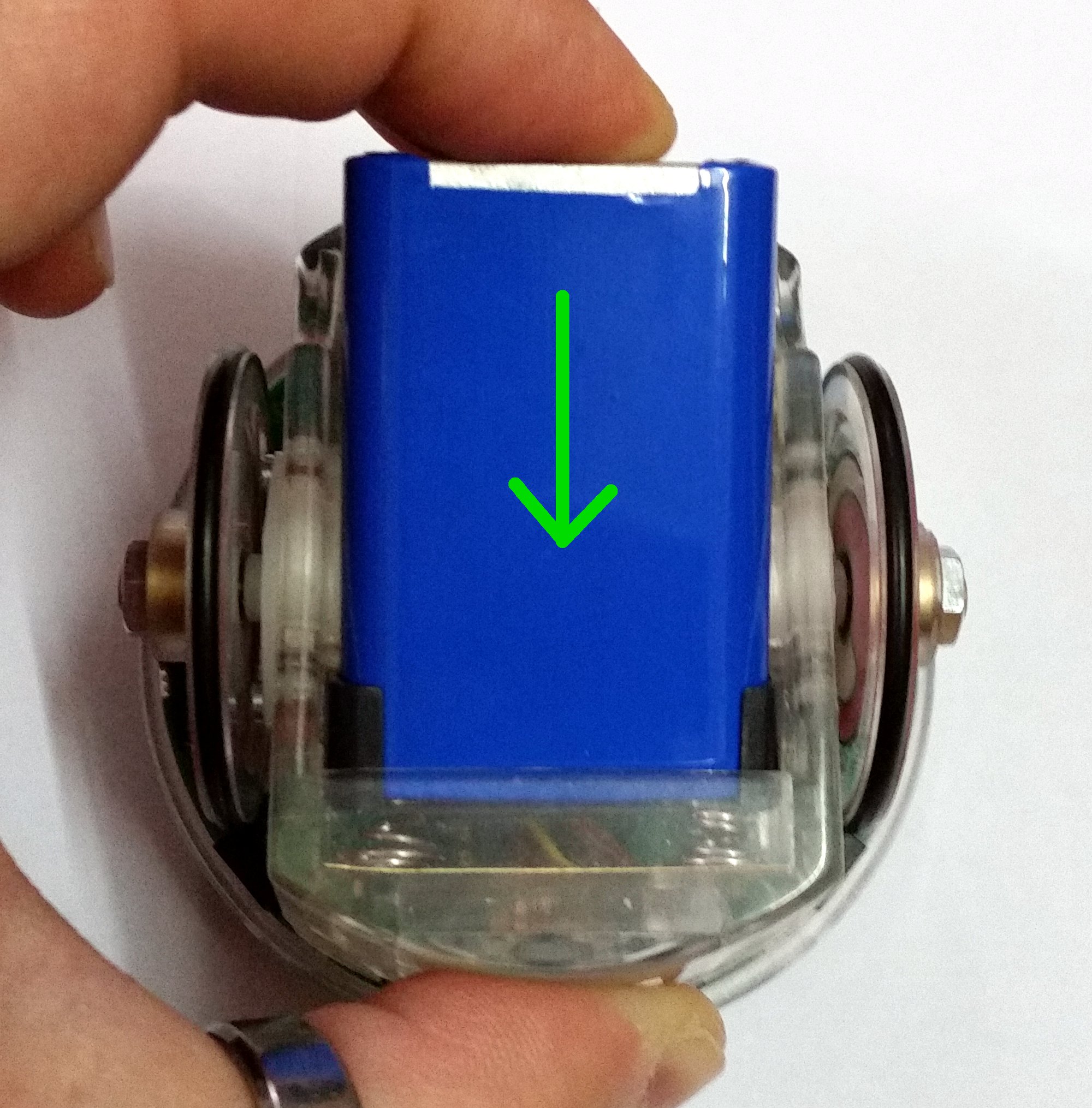
将电池插入机器人时要小心,不要刮伤塑料贴纸。 插入和取出电池时,您需要施加比以前更大的力。
电池上覆盖有塑料保护装置,以避免在插入/取出电池时发生任何可能的短路。
电池只能以一种方式插入:塑料保护装置未完全覆盖的一侧电池“顶部”必须朝向地面。
注意:不要移除黑色塑料保护!


这种电池并不适合旧款充电器,但它可以插在充电器中,以便接触良好并充电; 当连接正常时,您将看到LED已点亮。

电池(从2013年到2016年)
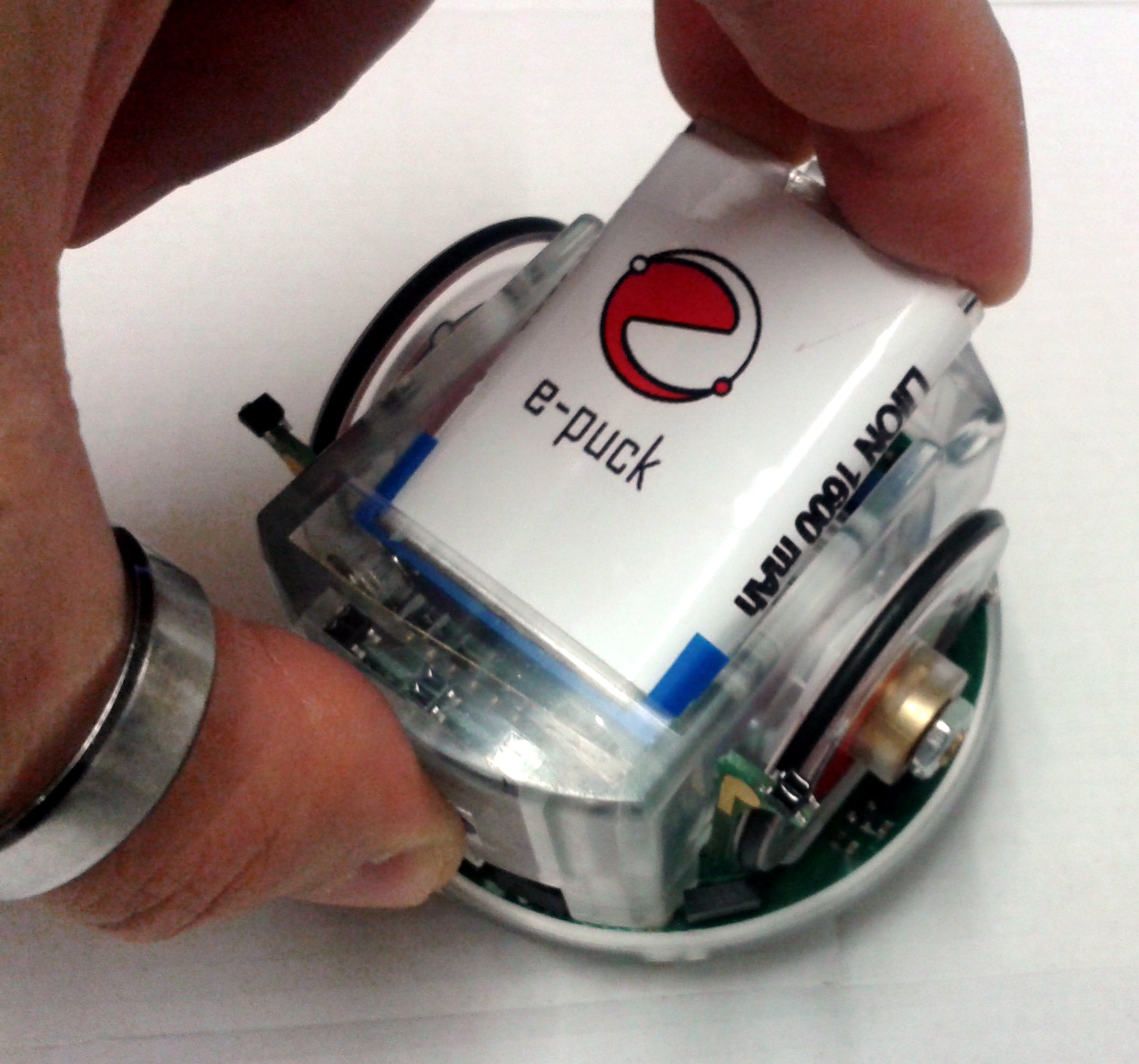
2013年的新电池更轻(33克),功能强劲(1600毫安时)。 外观不同但它们当然与机器人和充电器兼容。 将电池插入机器人时要小心,不要刮伤塑料贴纸。 不是安全问题,但在开始时保持良好;-)。
电池上覆盖有塑料保护装置,以避免在插入/取出电池时发生任何可能的短路。
注意:不要移除塑料保护!

电池(到2012年)
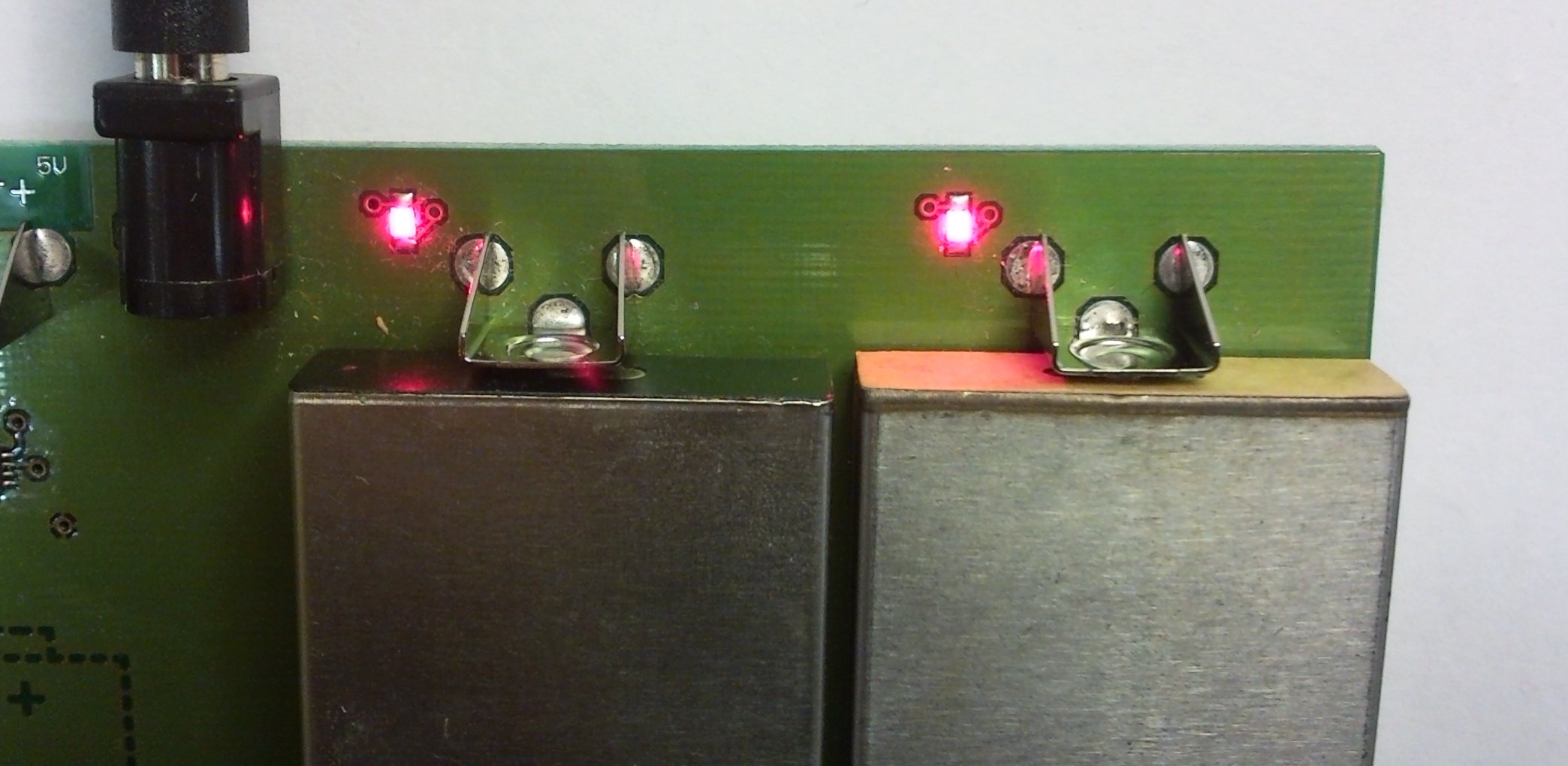
2012年交付的机器人在电池方面存在细微差别; 电池的类型总是相同的,但正极引脚的机械结构从一个版本到另一个版本略有不同。 带有黑色塑料盖的版本比棕色纸板盖的版本更多。

e-puck触点经过轻微修改,可以更好地与两个版本接触,如下图所示; 请参阅Contact-modification.pdf文档以获取有关如何应用此修改的更多信息。
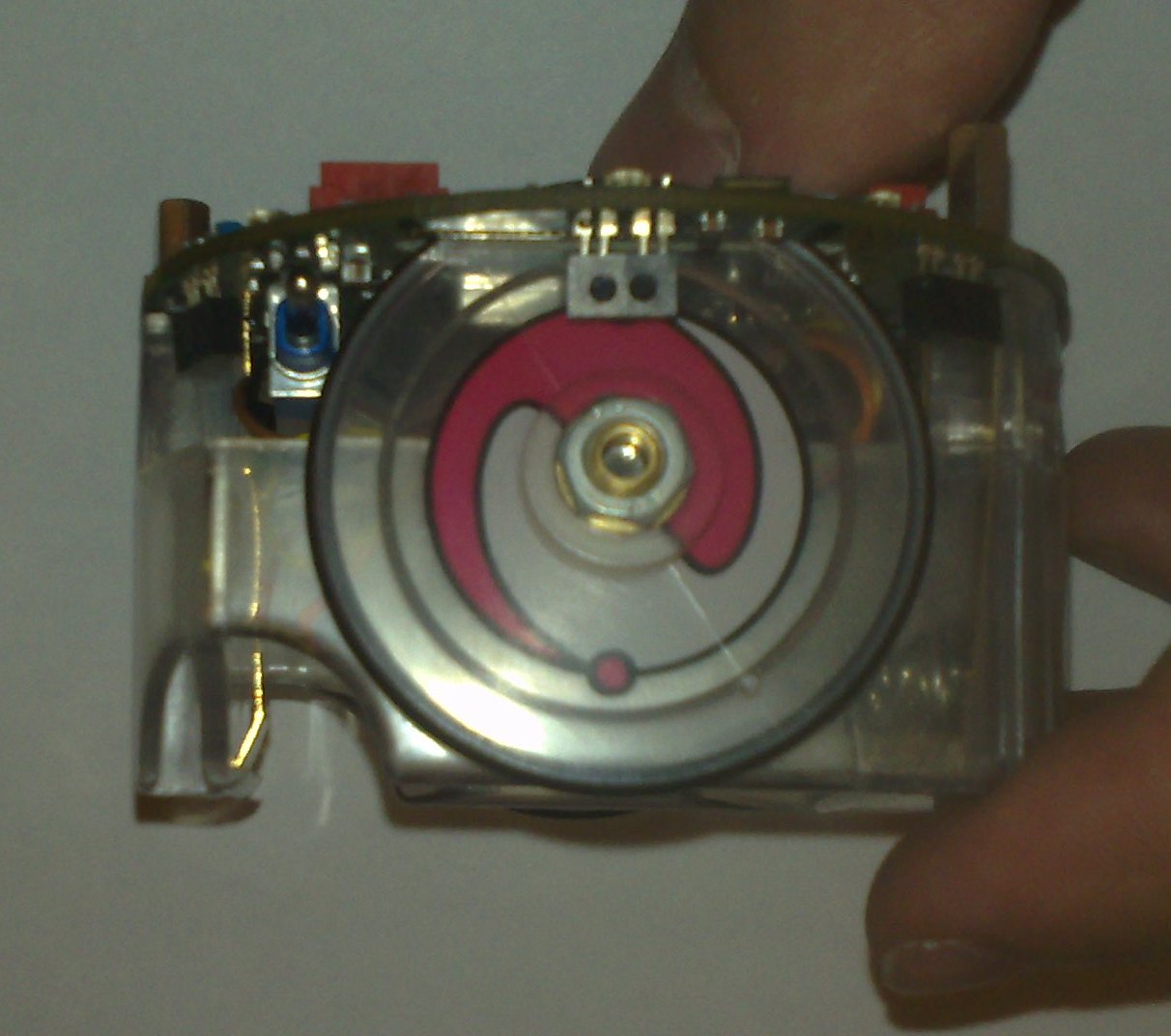
充电器与两个版本都接触,如下图所示。
正极引脚有一点氧化的倾向,可能需要刮一点才能完美连接。
充电器电路图
e-puck充电器的电路图可在以下链接charger-circuit-diagram.png中找到。