消息动态图
rqt_graph能够创建一个显示当前系统运行情况的动态图形。
rosrun rqt_graph rqt_graph

如果你将鼠标放在/turtle1/command_velocity上方,相应的ROS节点(蓝色和绿色)和话题(红色)就会高亮显示。
正如你所看到的,turtlesim_node和turtle_teleop_key节点正通过一个名为 /turtle1/command_velocity的话题来互相通信。

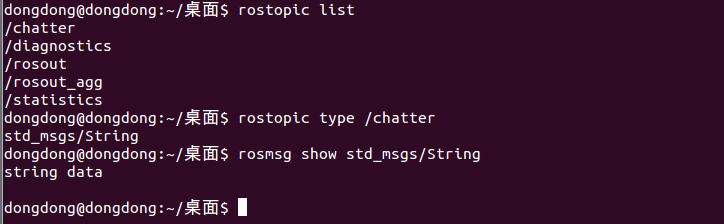
消息的查看
//查看当前已经发布的消息 rostopic list
//查看消息具体是什么 rostopic echo [消息名]
//查看消息的数据类型 rostopic type [消息名] //查看消息字段(具体类型) rosmsg show [消息名] //发布消息 rostopic pub [topic] [msg_type] [args] //样例 rostopic pub -1 [消息名] [消息类型] -- 1 1
服务的使用
// 查看当前提供的服务 rosservice list //查看服务的类型 rosservice type [服务名] //调用服务 rosservice call [服务名] [参数]