11.1 GPIO 介绍
11.1.1 GPIO 管脚
GPIO 即是输入输出端口,S3C2440A 包含了 130 个多功能输入/输出口引脚并且它们为如下显示的八个端口:
- 端口 A(GPA):25 位输出端口
- 端口 B(GPB):11 位输入/输出端口
- 端口 C(GPC):16 位输入/输出端口
- 端口 D(GPD):16 位输入/输出端口
- 端口 E(GPE):16 位输入/输出端口
- 端口 F(GPF):8 位输入/输出端口
- 端口 G(GPG):16 位输入/输出端口
- 端口 H(GPH):9 位输入/输出端口
- 端口 J(GPJ):13 位输入/输出端口
GPIO 的功能即是用于 CPU 采集外设信号(INPUT),CPU 输出控制信号(OUTPUT),还有一种功能称为管脚复用功能,即是 GPIO 用于其他信号功能,比如地址,串口等共呢个,GPIO 属于 SOC 的内部外设。
GPIO 的使用需要寄存器配置。
11.1.2 GPIO 寄存器
- 端口配置寄存器:GPACON --- GPJCON,即配置输入或是输出,还是配置为第三功能
- 端口数据寄存器:GPADAT---GPJDAT,用于数据的写入或读取
- 端口上拉寄存器:GPBUP---GPJUP,端口上拉寄存器控制每个端口组的使能/禁止上拉电阻。
- 当相应位为 0 时使能引脚的上拉电阻。当为 1 时禁止上拉电阻。
- 如果使能了上拉电阻,那么上拉电阻与引脚的功能设置无关(输入、输出、DATAn、EINTn 等等)
- 杂项控制寄存器:
- 此寄存器控制睡眠模式,USB 引脚和 CLKOUT 选择的数据端口上拉电阻。
- 外部中断控制寄存器:
- 24 个外部中断由各种信号方式触发。
- EXTINT 寄存器为外部中断请求配置信号触发方式为低电平触发、高电平触发、下降沿触发、上升沿触发或双边沿触发。
- 由于每个外部中断引脚包含一个数字滤波器,中断控制可以确认请求信号是否长于 3 个时钟。
11.2 GPIO 控制 LED
11.2.1 原理图
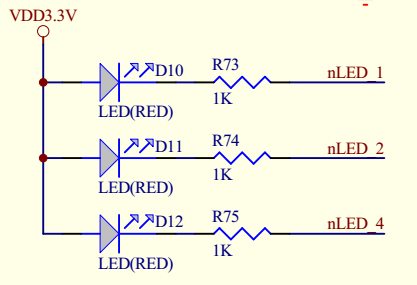

- 从原理图上可以看出,三个灯的控制是由 GPF4 - GPF6 控制的。
- 由于 LED 由 3.3V 高电平供电,则 GPF4- GPF6 引脚必须要设置为低电平,形成压差点亮 LED
11.2.2 GPF 控制寄存器
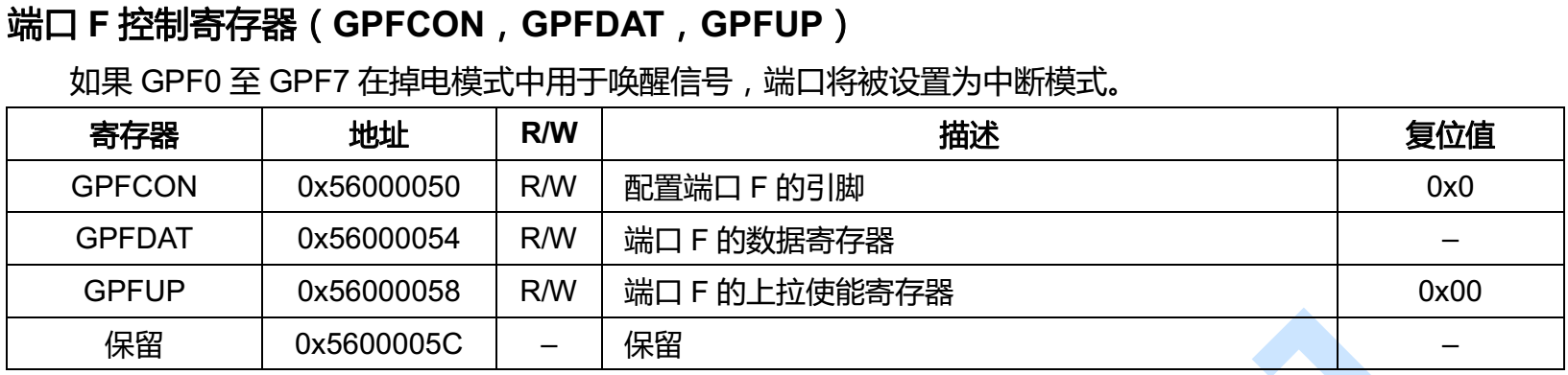
- GPF 主要涉及到三个寄存器:
- GPFCON:端口配置寄存器,配置各个 I/O 管脚是输入/输出功能,还是第三功能,此寄存器的地址是 0x56000050
- GPFDAT:数据寄存器,用于管脚发送或是接收数据,地址是 0x56000054
- GPFUP:上拉寄存器,地址为 0x56000058,需要才用这个寄存器
- 注意 GPF 控制器的复位值,初始化值即是此值。
- 具体配置查看芯片手册
11.3 汇编控制 LED
- 指令的执行时间:
- 一般单片机指令执行时间是固定的,参考手册,而在高性能的嵌入式 SOC 中,指令执行时间与各方面的因素有关,比如:缓存,内存,硬盘上的传输开销,指令开销,所以在高性能 SOC 上讨论指令的执行时间没有意义。
- 考虑到多发射、超标量、超流水线、乱序执行、追踪缓存等设计越来越复杂,仅评价单条指令耗时比单片机要困难得多
- 更由意义的指标是经过统计分析的 CPI、MIPS 数据。
- 1MHz = 1us
- 1GHz = 1ns
- 一般情况下,裸机中精确延时采用定时器,如果延时在 20 us 下的话,定时器不是太合适,需要汇编辅助完成
- 如果更小的时间要求,那么表示硬件无法满足当前需求
11.4 C语言控制 LED
makefile
1 # 获取当前工作目录 2 CURRDIR = $(shell pwd) 3 4 # 头文件所在目录 5 INCDIR = $(CURRDIR) 6 7 # 交叉编译工具链的绝对路径 8 CROSS_COMPILE = ~/work/s3c2440/tools/gcc-3.4.5-glibc-2.3.6/bin/arm-linux- 9 10 # 编译器工具 11 AS = $(CROSS_COMPILE)as 12 LD = $(CROSS_COMPILE)ld 13 CC = $(CROSS_COMPILE)gcc 14 CPP = $(CC) -E 15 AR = $(CROSS_COMPILE)ar 16 NM = $(CROSS_COMPILE)nm 17 STRIP = $(CROSS_COMPILE)strip 18 OBJCOPY = $(CROSS_COMPILE)objcopy 19 OBJDUMP = $(CROSS_COMPILE)objdump 20 21 # 编译器标识位设置 22 CFLAGS := 23 AFLAGS := 24 LDFLAGS := 25 CFLAGS := 26 AFLAGSL := 27 28 # 目标文件设置 29 objs := startup.o led.o 30 31 all: clean s3c2440.bin 32 33 34 # 执行编译的过程 35 s3c2440.bin: $(objs) 36 $(LD) -Ttext 0x00000000 -o s3c2440_elf $^ 37 $(OBJCOPY) -O binary -S s3c2440_elf $@ 38 $(OBJDUMP) -D -m arm s3c2440_elf > s3c2440.dis 39 40 41 %.o:%.c 42 $(CC) -Wall -Wstrict-prototypes -O2 -fomit-frame-pointer -ffreestanding -c -o $@ $< 43 44 %.o:%.S 45 $(CC) -Wall -Wstrict-prototypes -O2 -fomit-frame-pointer -ffreestanding -c -o $@ $< 46 47 clean: 48 rm -f *.bin *_elf *.dis *.o
startup.S
1 .text 2 .global _start 3 4 _start: 5 ldr r0, =0x53000000 @ WATCHDOG寄存器地址 6 mov r1, #0x0 7 str r1, [r0] @ 写入0,禁止WATCHDOG,否则CPU会不断重启 8 9 ldr sp, =1024*4 @ 设置堆栈,注意:不能大于4k, 因为现在可用的内存只有4K 10 @ nand flash中的代码在复位后会移到内部ram中,此ram只有4K 11 12 bl main @ 调用 C 程序的 main 函数 13 14 halt_loop: 15 b halt_loop
led.c
1 /** 2 * 将0x56000050 强转为 unsigned long 型指针,并取这个地址的值 3 * volatile 关键字:防止编译器优化,在应用层上多线程变量,在嵌入式中外设寄存器 4 */ 5 #define GPFCON (*(volatile unsigned long *)0x56000050) 6 #define GPFDAT (*(volatile unsigned long *)0x56000054) 7 #define GPFUP (*(volatile unsigned long *)0x56000058) 8 9 /** 设置 GPFCON 的 4 5 6 引脚为输出 */ 10 #define GPF4_OUT (1 << (4 * 2)) 11 #define GPF5_OUT (1 << (5 * 2)) 12 #define GPF6_OUT (1 << (6 * 2)) 13 14 static void delay_ms(unsigned long ms); 15 16 int main(void) 17 { 18 /** 将LED1-3对应的GPF4/5/6三个引脚设为输出 */ 19 GPFCON = GPF4_OUT | GPF5_OUT | GPF6_OUT; 20 21 unsigned long i = 0; 22 while(1){ 23 delay_ms(500); 24 GPFDAT = (~(i<<4)); // 根据i的值,点亮LED1,2,4 25 if(++i == 8) 26 i = 0; 27 } 28 } 29 30 static void delay_ms(unsigned long ms) 31 { 32 unsigned int i; 33 34 while(ms--) { 35 for(i = 0; i < 1200; i++); 36 } 37 }