STM32 中一共有11 个定时器,其中2 个高级控制定时器,4 个普通定时器和2 个基本定时器,以及2 个看门狗定时器和1 个系统嘀嗒定时器。其中系统嘀嗒定时器是前文中所描述的SysTick,看门狗定时器以后再详细研究。今天主要是研究剩下的8 个定时器。关于这8 个定时器的简要说明,如图60 所示。其中TIM1 和TIM8 是能够产生3 对PWM 互补输出的高级定时器,常用于三
相电机的驱动,时钟由APB2 的输出产生。TIM2-TIM5 是普通定时器,TIM6 和TIM7
是基本定时器,其时钟由APB1 输出产生。由于STM32 的TIMER 功能比较复杂,
所以只能一点一点的学习。因此今天就从最简单的开始学习起,也就是
TIM2-TIM5 普通定时器的定时功能。

因此,就我们现在所学习的通用定时器来说,其完全可以以72MHz 的方式去工作。
关于定时器中断的配置步骤,主要分成以下三步:
一、 配置嵌套中断控制器NVCI;
二、定时器初始化配置;
三、定时器中断函数处理。
以下代码为核心代码,不包括一些.h文件,都是在一个文件中的。
一、 配置嵌套中断控制器NVCI;
1 //1、配置嵌套中断控制器NVIC 2 void NVIC_config(void) 3 { 4 NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);//优先级分组 5 6 NVIC_InitTypeDef nvic; 7 nvic.NVIC_IRQChannel=TIM2_IRQn; 8 nvic.NVIC_IRQChannelCmd=ENABLE; 9 nvic.NVIC_IRQChannelPreemptionPriority=0; 10 nvic.NVIC_IRQChannelSubPriority=0; 11 NVIC_Init(&nvic); 12 }
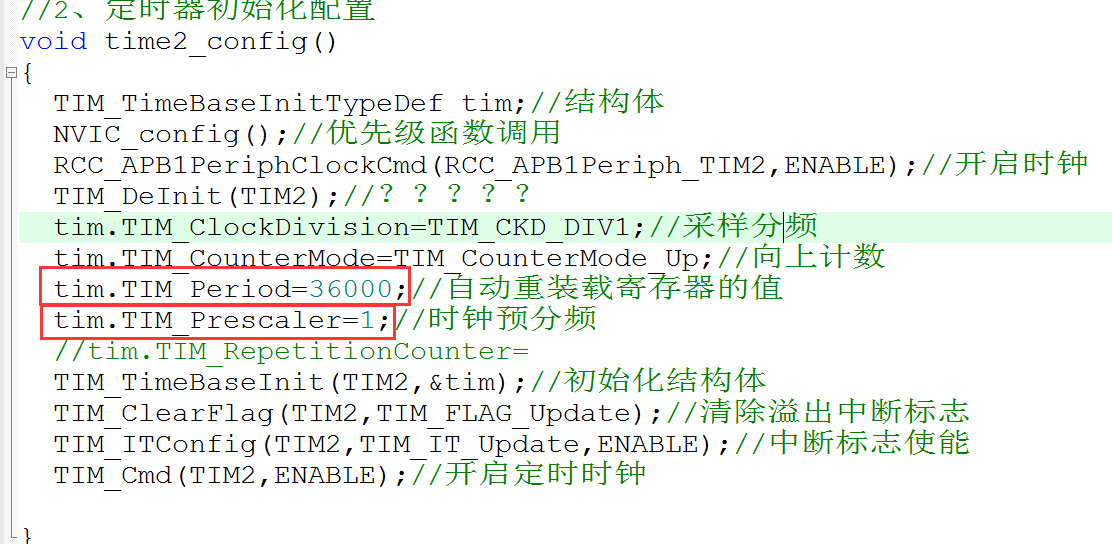
二、定时器初始化配置;
1 //2、定时器初始化配置 2 void time2_config() 3 { 4 TIM_TimeBaseInitTypeDef tim;//结构体 5 NVIC_config();//优先级函数调用 6 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//开启时钟 7 TIM_DeInit(TIM2);//????? 8 tim.TIM_ClockDivision=TIM_CKD_DIV1;//采样分频 9 tim.TIM_CounterMode=TIM_CounterMode_Up;//向上计数 10 tim.TIM_Period=1000;//自动重装载寄存器的值 11 tim.TIM_Prescaler=35;//时钟预分频 12 //tim.TIM_RepetitionCounter= 13 TIM_TimeBaseInit(TIM2,&tim);//初始化结构体 14 TIM_ClearFlag(TIM2,TIM_FLAG_Update);//清除溢出中断标志 15 TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE); 16 TIM_Cmd(TIM2,ENABLE);//开启时钟 17 18 }
三、定时器中断函数处理。
1 //TIM2通用定时器 2 uint16_t count = 0; 3 void TIM2_IRQHandler(void) 4 { 5 6 7 if(TIM_GetITStatus(TIM2,TIM_IT_Update)!=RESET)//判断中断标志是否发生 8 { 9 count++; 10 if(count == 1000) 11 { 12 //点亮红灯 13 red_toggle();//红灯翻转,实现亮一秒灭一秒 14 //count清零 15 count=0; 16 } 17 //手动清除中断标志位 18 19 } 20 TIM_ClearITPendingBit(TIM2,TIM_FLAG_Update); 21 }
四、LED灯配置
这是GPIO配置
1 int led_gpio_init() 2 { 3 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//时钟使能 4 GPIO_InitTypeDef a; 5 a.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_5;//可在这修改颜色 另外在主函数也要相应的修改 端口 5是红色 0是绿色 1是蓝色 6 a.GPIO_Speed = GPIO_Speed_50MHz;//设置输出速率50MHz 7 a.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出 8 GPIO_Init(GPIOB,&a);//初始化GPIO,配置工作方式等 9 GPIO_SetBits(GPIOB,GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_5);//默认为高电平,灭灯 10 }
实现翻转功能
1 /*红灯翻转*/ 2 /* 3 *读取电平,如果等于高就执行赋低电平,否则给高电平 4 */ 5 void red_toggle() 6 { 7 if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_5) == RESET)//如果检测到低电平 8 { 9 GPIO_SetBits(GPIOB,GPIO_Pin_5);//高电平点亮 10 11 } 12 else 13 { 14 GPIO_ResetBits(GPIOB,GPIO_Pin_5);//低点平熄灭 15 } 16 }
五、主函数
主函数主要调用这个就行
1 led_gpio_init();//GPIO配置 2 NVIC_config();//中断优先级配置 3 time2_config();//定时器TIM2配置
以STM32TIM6为例讲解定时原理
熟记一个公式:定时时间=计数器的中断周期*中断的次数
有一个主角:计数器,他为定时发挥巨大的作用
计数器是一个16位的计数器,只能往上计数,最大计数值为65535(怎么算最大值??)。
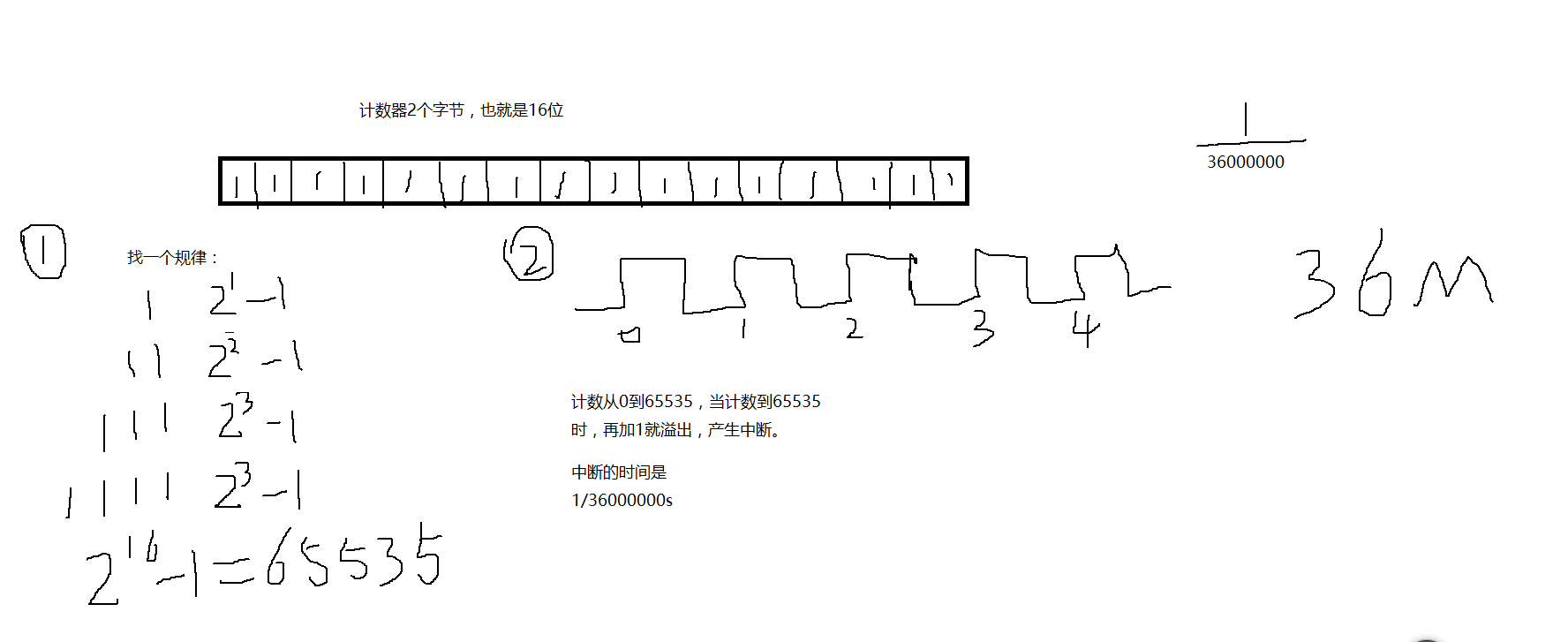
当计数到这个值的时候,如果使能了中断,定时器就产生溢出中断。
问题来了:72MHz,36MHz,是什么意思?有什么用?
MHz是一个频率的单位,36MHz=36000 000Hz,就是每秒产生36000 000次,那么产生一次需要1/36000 000秒,
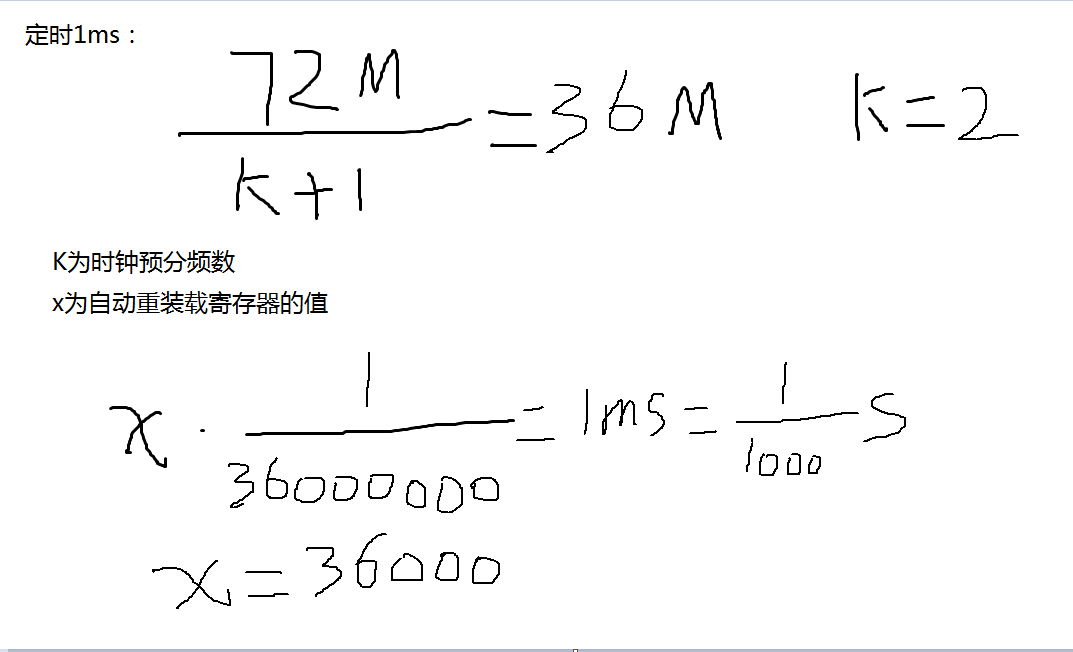
那么产生1ms需要多少次??
单位换算一下,1ms等于1/1000s
假设需要x次,则x*(1/36000 000)=1/1000
x=36000
在36MHz的频率下,计数值为36000,可以产生1ms
再举个例子:
上面的值实际应用看下面: