目录
郭德骏,优必选北美研发中心高级工程师,美国犹他大学博士,获得2017ASME DSCC最佳学生论文奖。在国际刊物和会议发表SC1|索论文10余篇。主要研究方向包括视觉伺服、控制算法、路径规划、无人车自主导航、无人机、机械臂。
直播内容
1.概述、背景与挑战
2.算法开发与应用
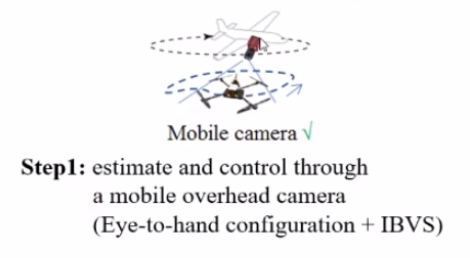
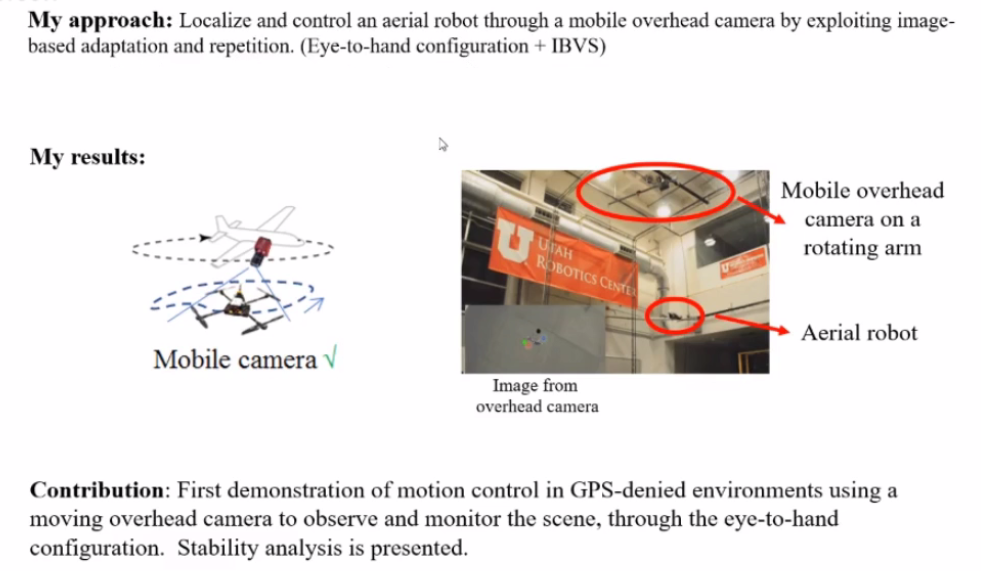
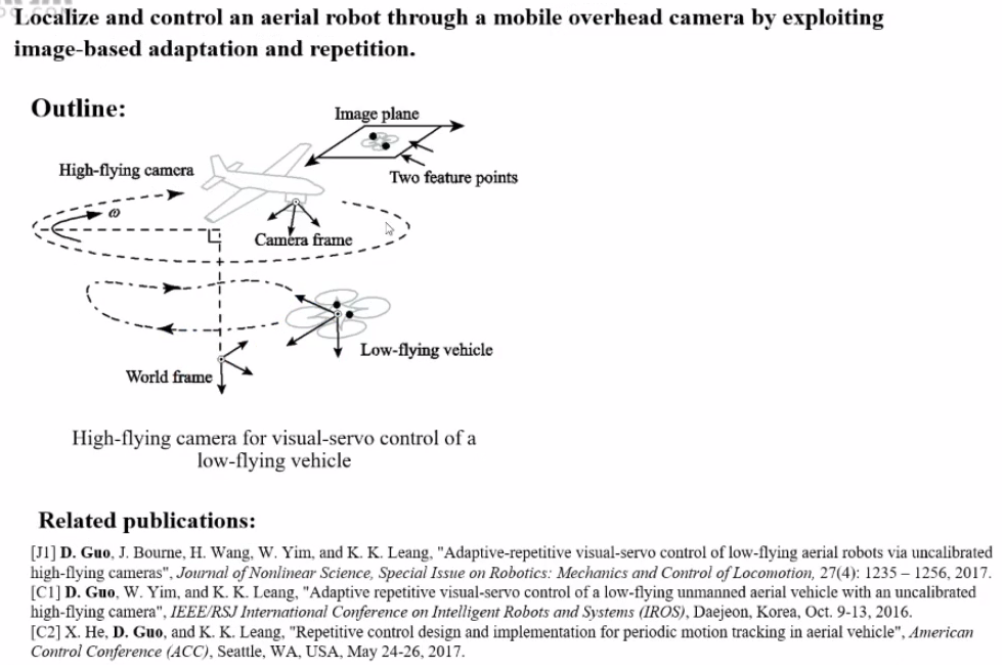
2.1基于高空盘旋相机的四旋翼控制
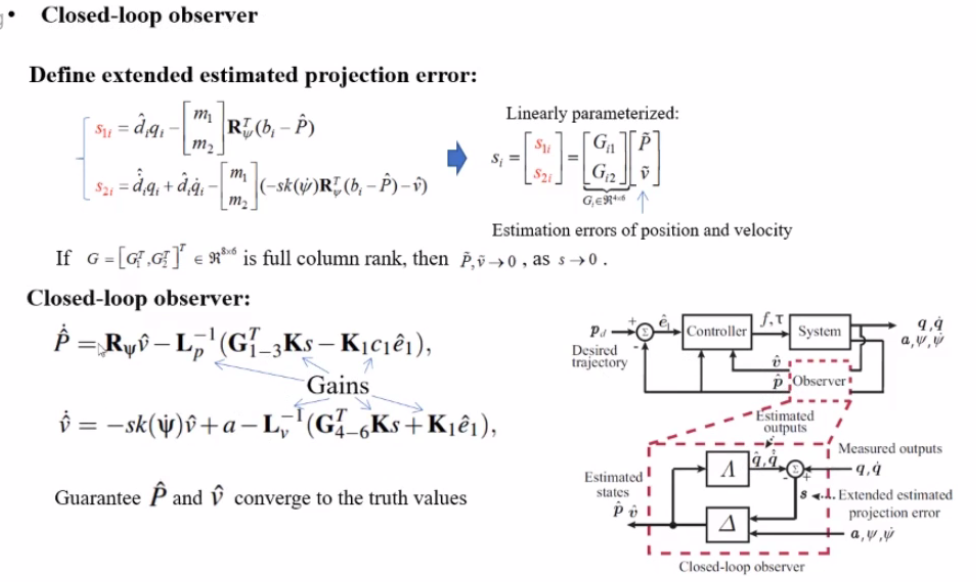
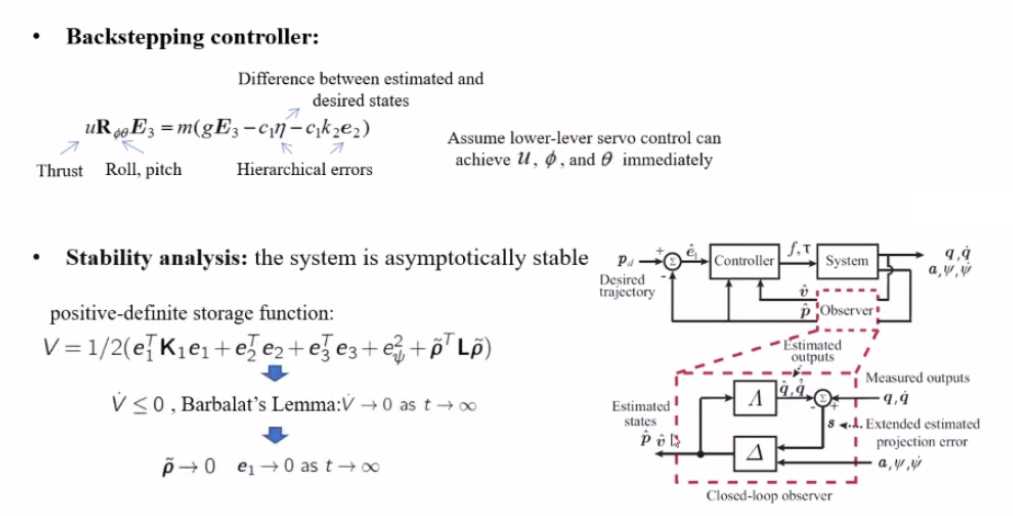
2.2基于机载相机的状态估计与动力学控制
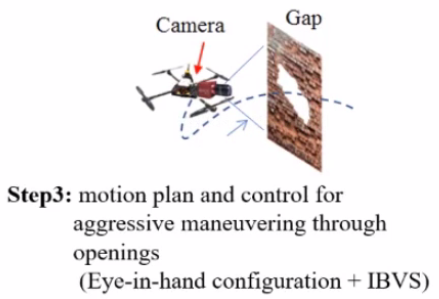
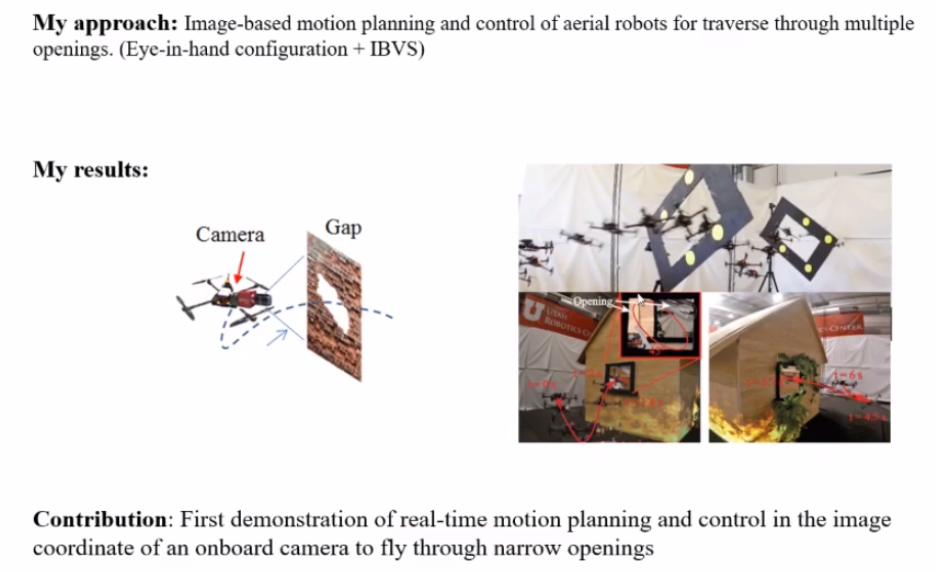
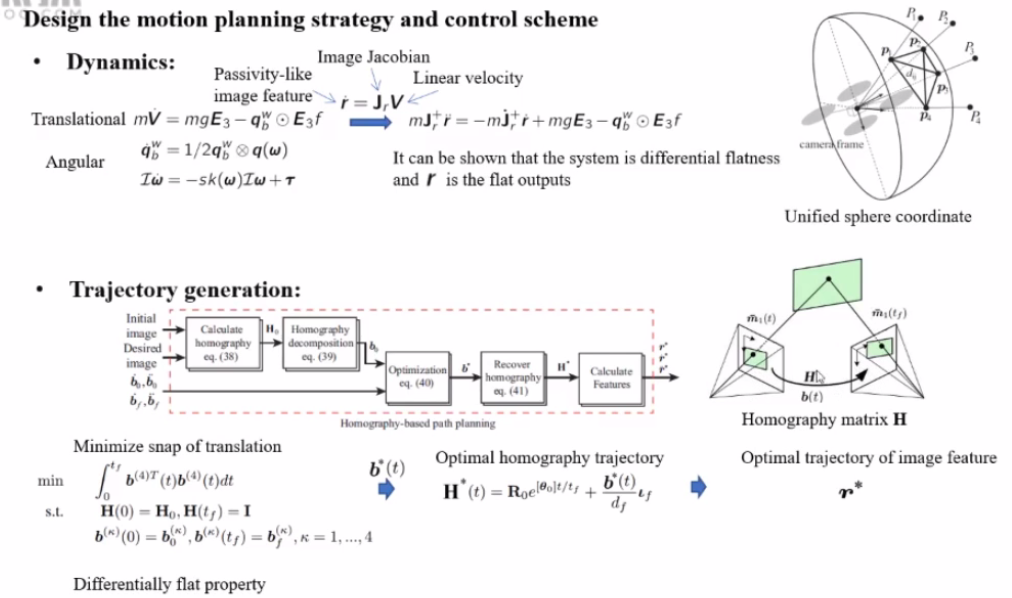
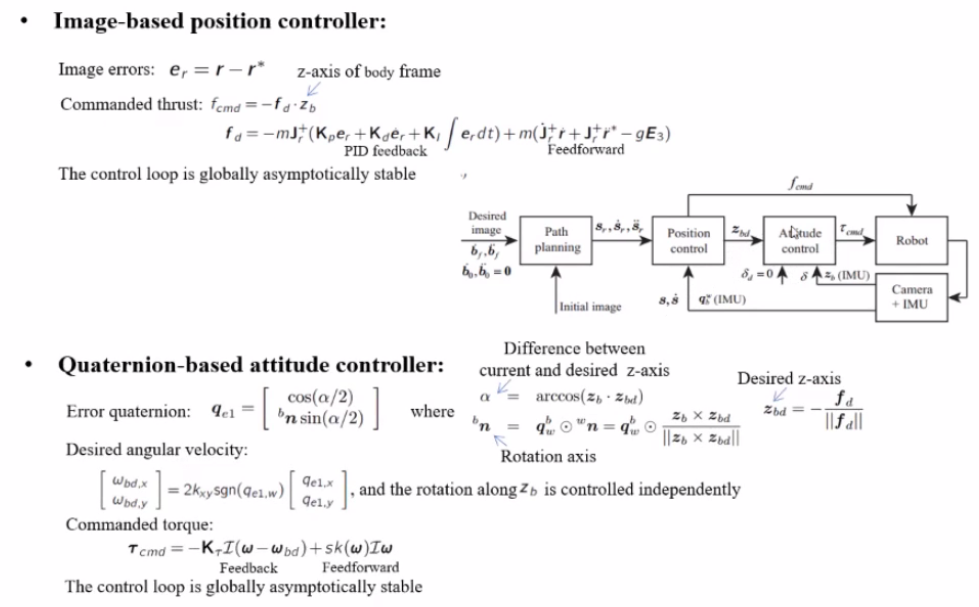
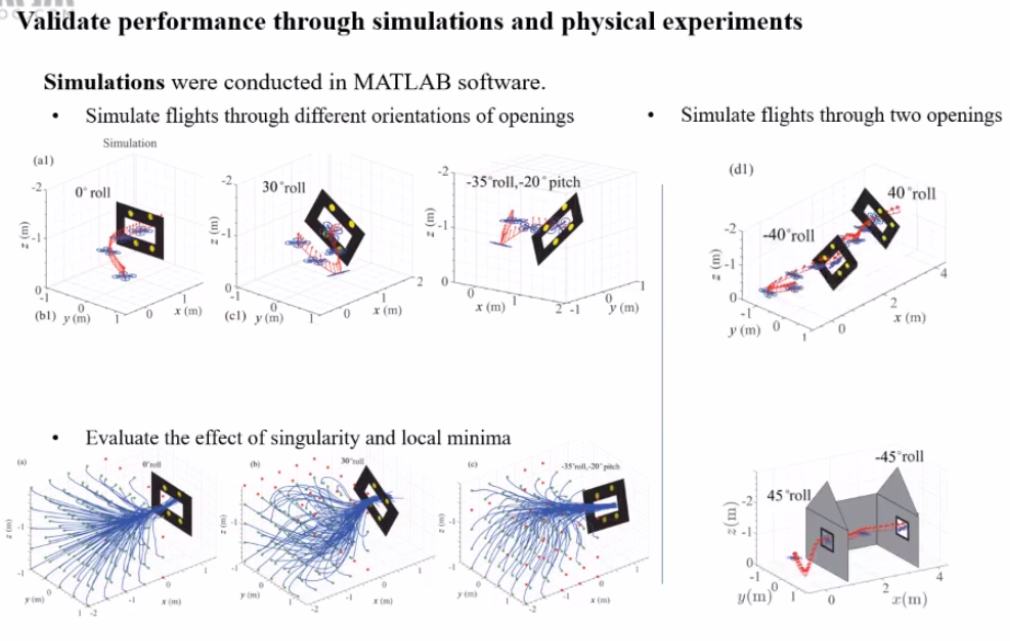
2.3基于机载相机图像的高速机动-轨迹规划与动力学控制
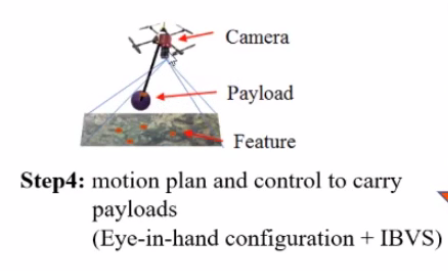
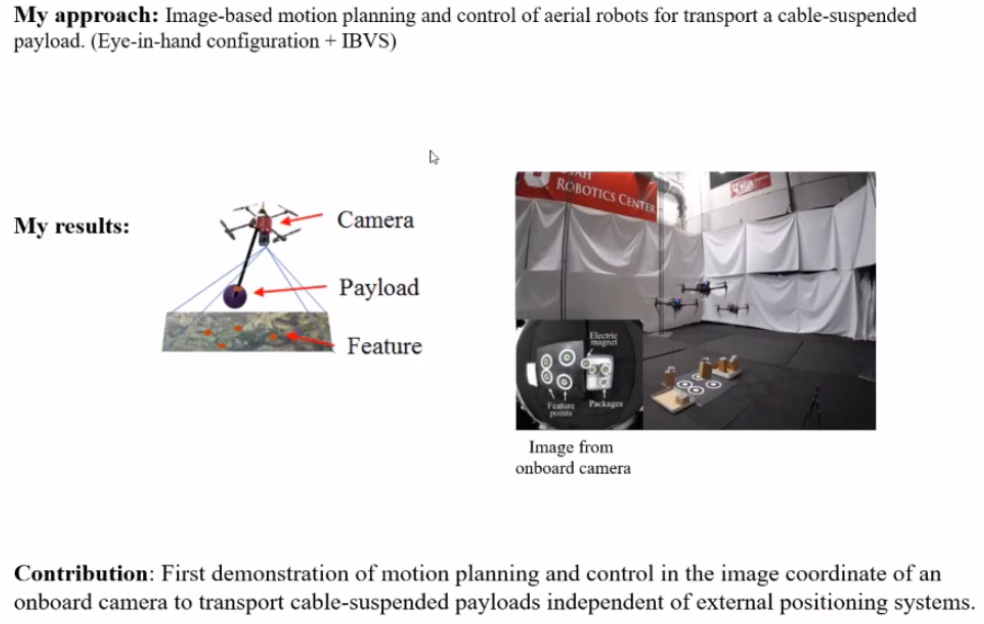
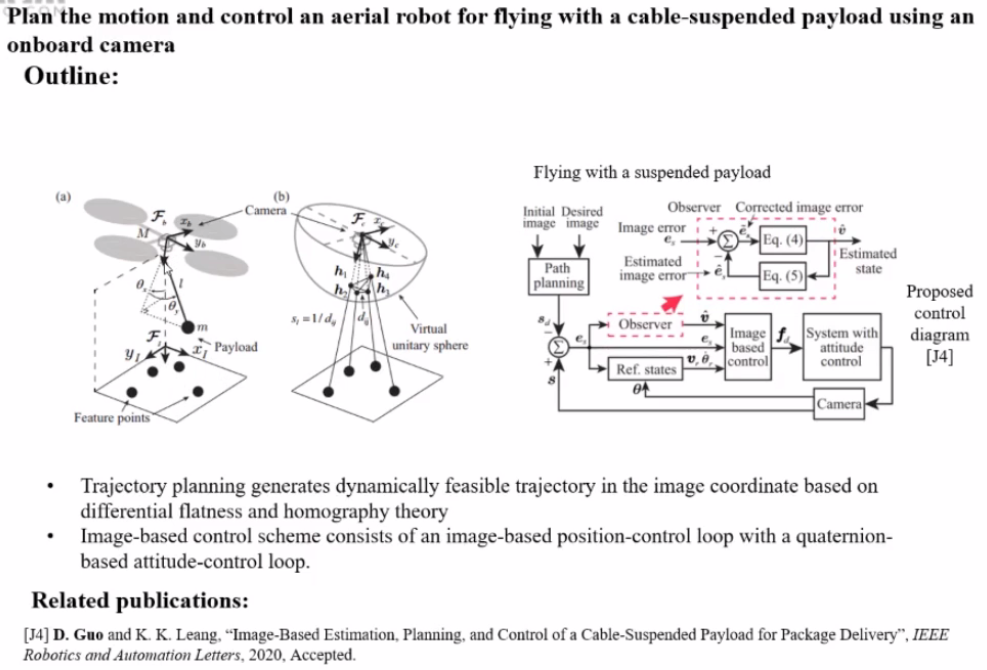
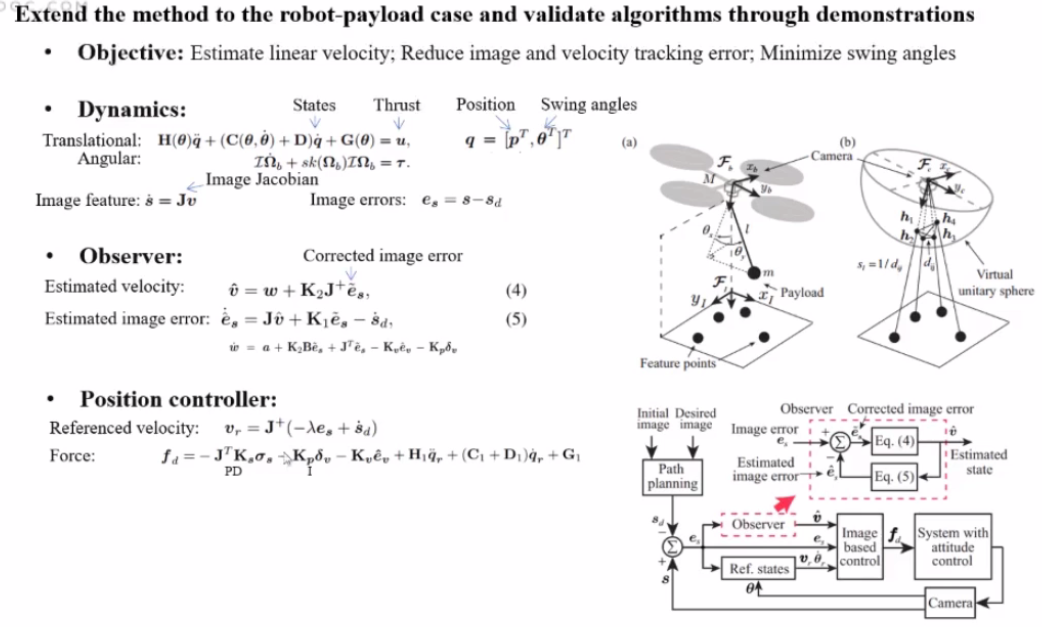
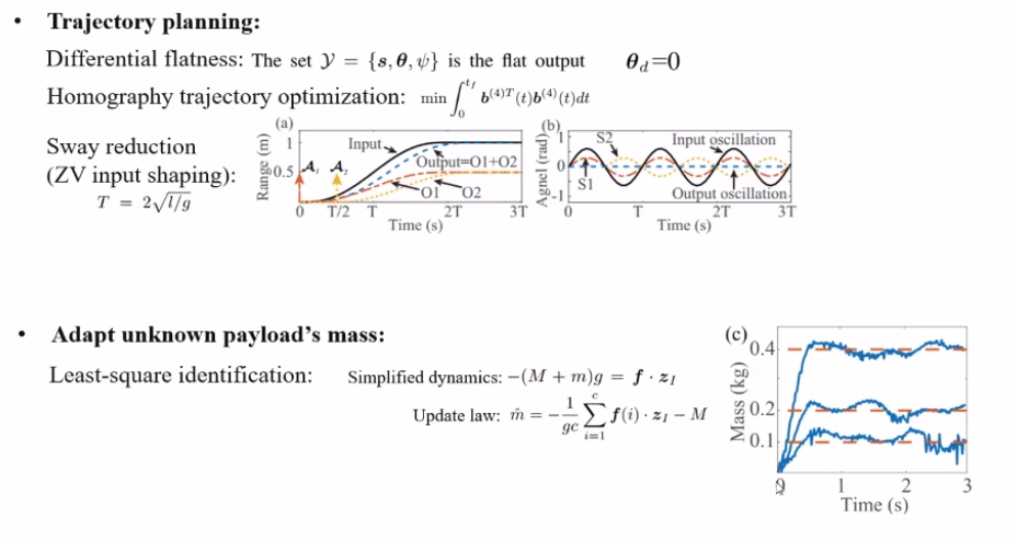
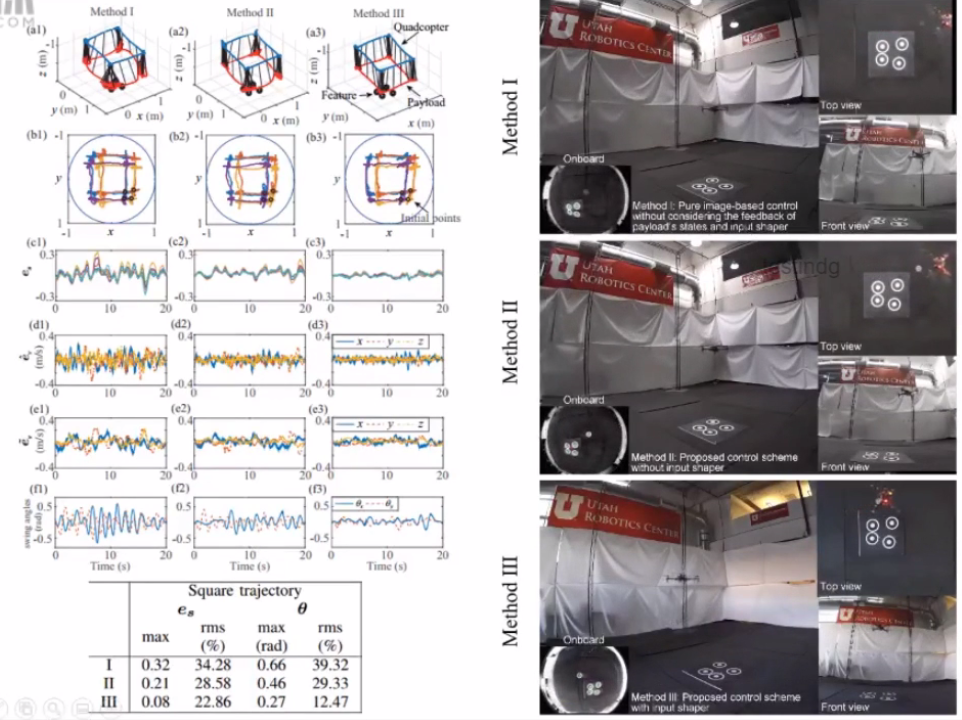
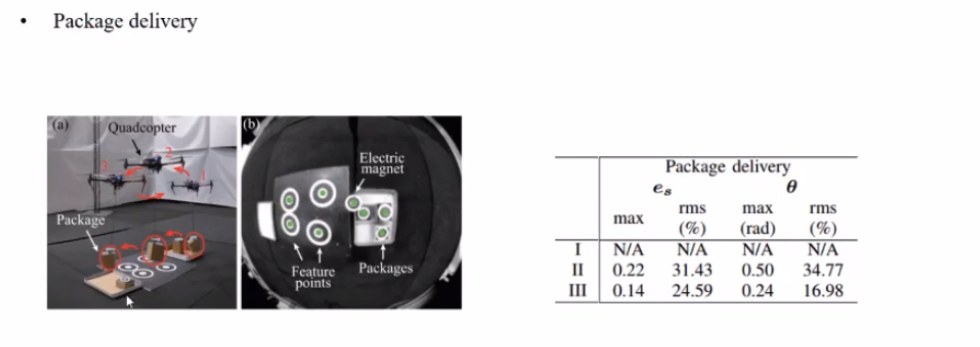
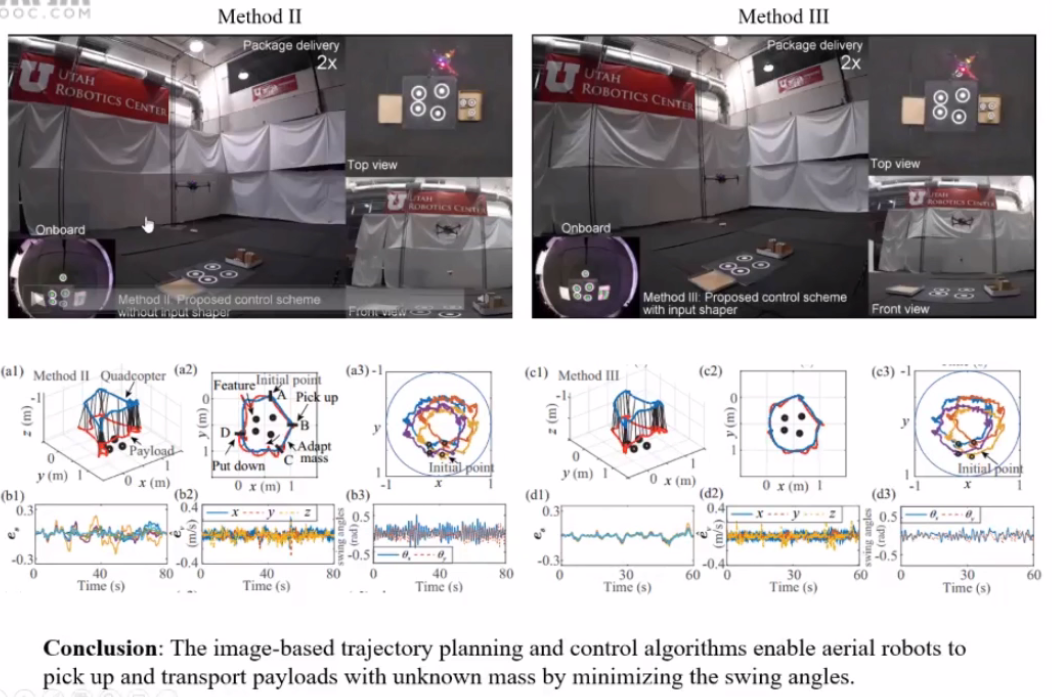
2.4基于机载相机圈像的精准包裹递送-轨迹规划与动力学控制
无人机介绍部分不记录笔记。
研究背景
当前研究
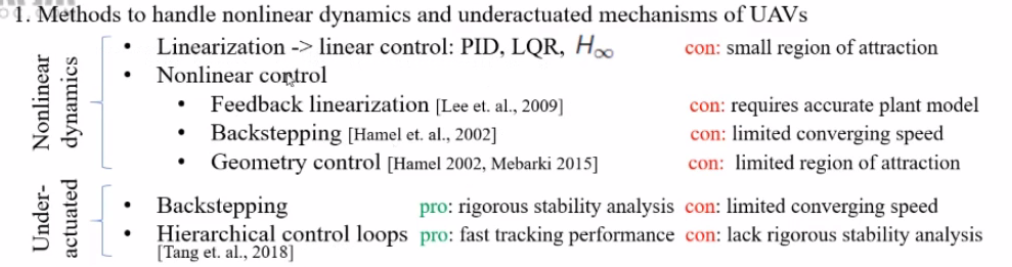
控制
-
线性化
在平衡点附近的线性化
收敛域较小,角度过大时控制器发散 -
非线性控制方法
精确建模+反馈线性化、反步法、几何控制
用于高速无人机控制 -
欠驱动条件下
-
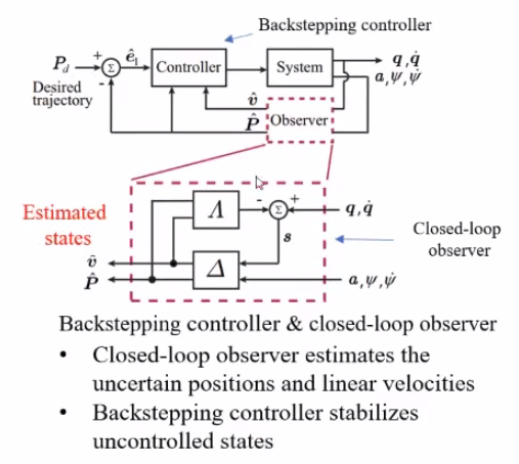
反步法
-
多层控制环
注意其具有的优缺点。
-
感知

使用单目相机+IMU的控制比较有挑战。
耦合问题

-
加云台
-
三维重构法
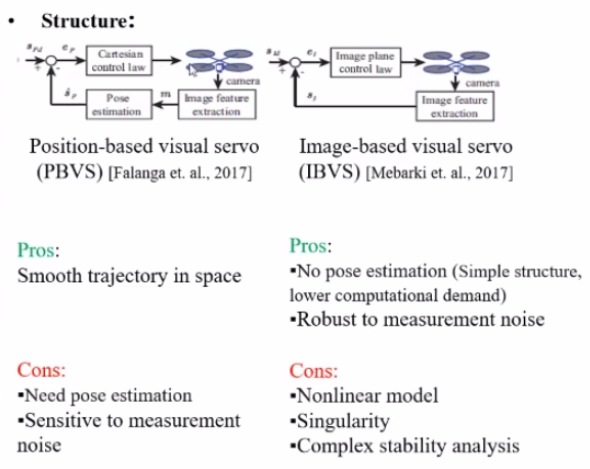
视觉伺服
分类1
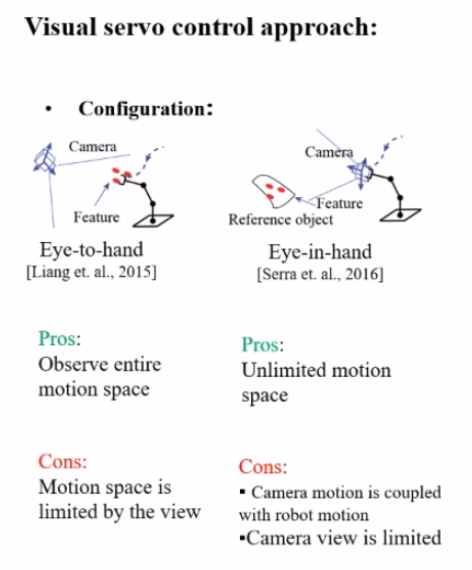
分类2
当前研究的不足
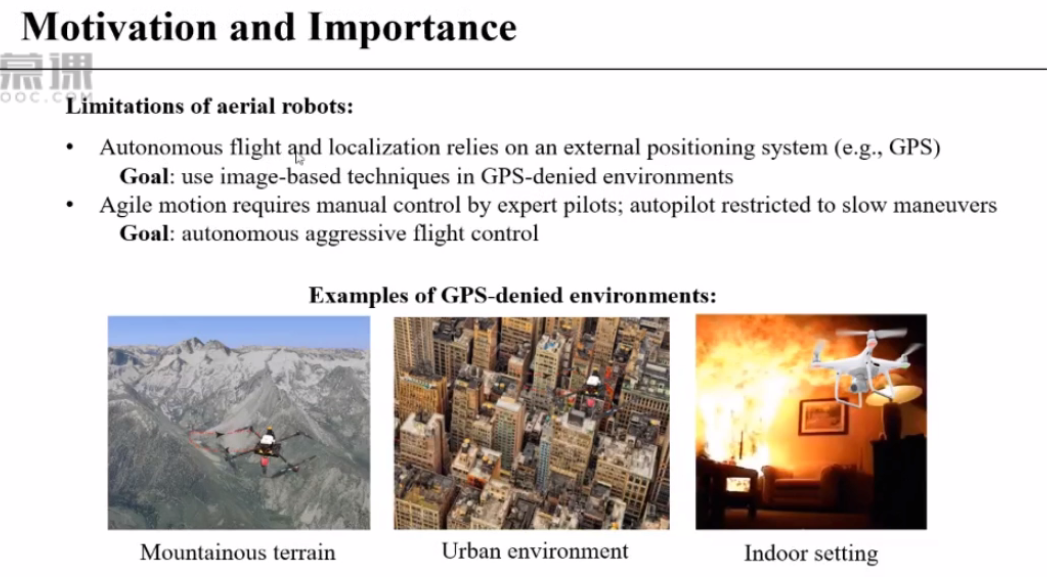
一是对GPS的过度依赖(图像技术解决),二是对人工操控的过度依赖。
研究重要性

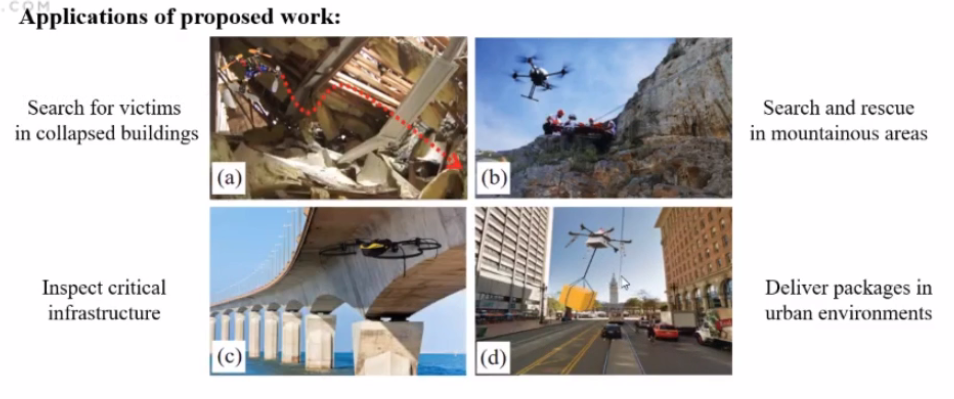
应用方向
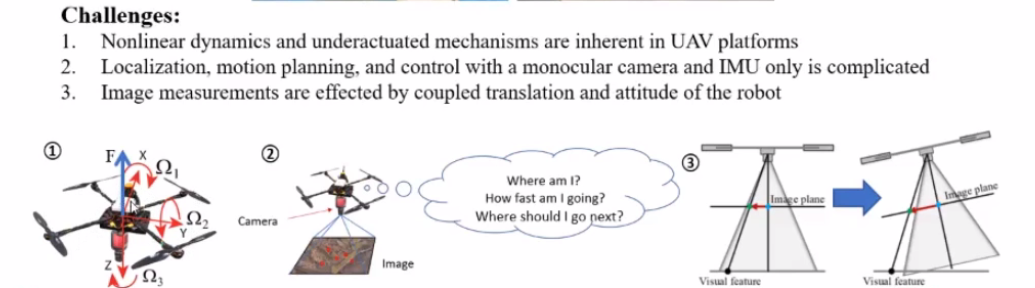
挑战
-
非线性
非线性动力学是指从输入量到观测量的映射是非线性的,由飞机角度的三角函数产生。
-
欠驱动
控制量3个需要控制12个量。
-
图像测量与飞机位置耦合
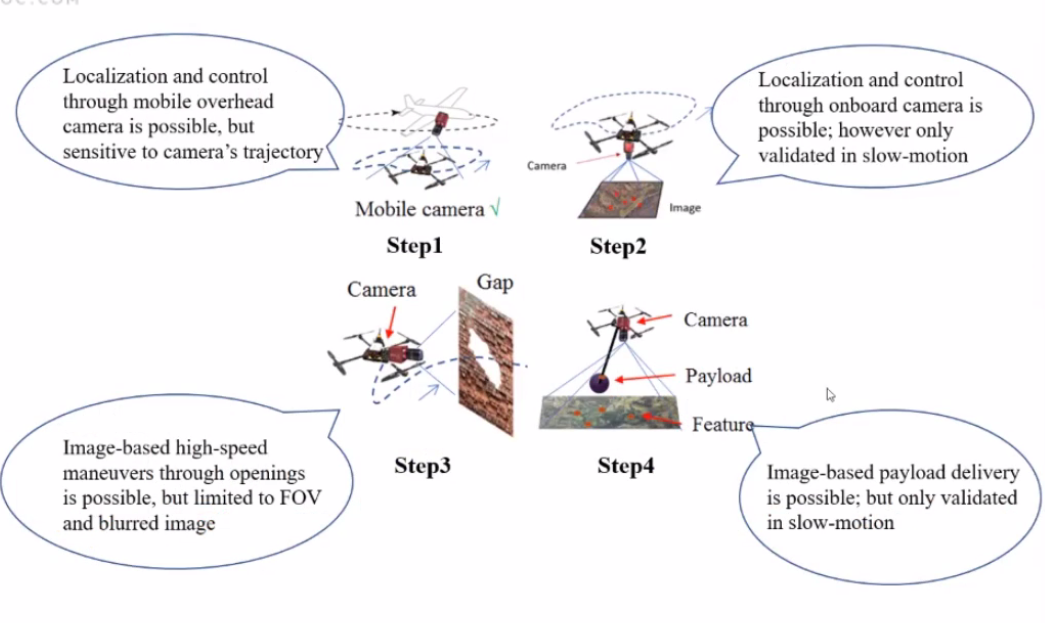
工作概览

天空摄像头向下监视获取无人机信息
无人机携带摄像头观察地面获取自身信息

无人机高速运动过程中观察环境
钢索配重问题
天空摄像头
研究现状
1.简化为平行平面

2.飞机携带摄像头

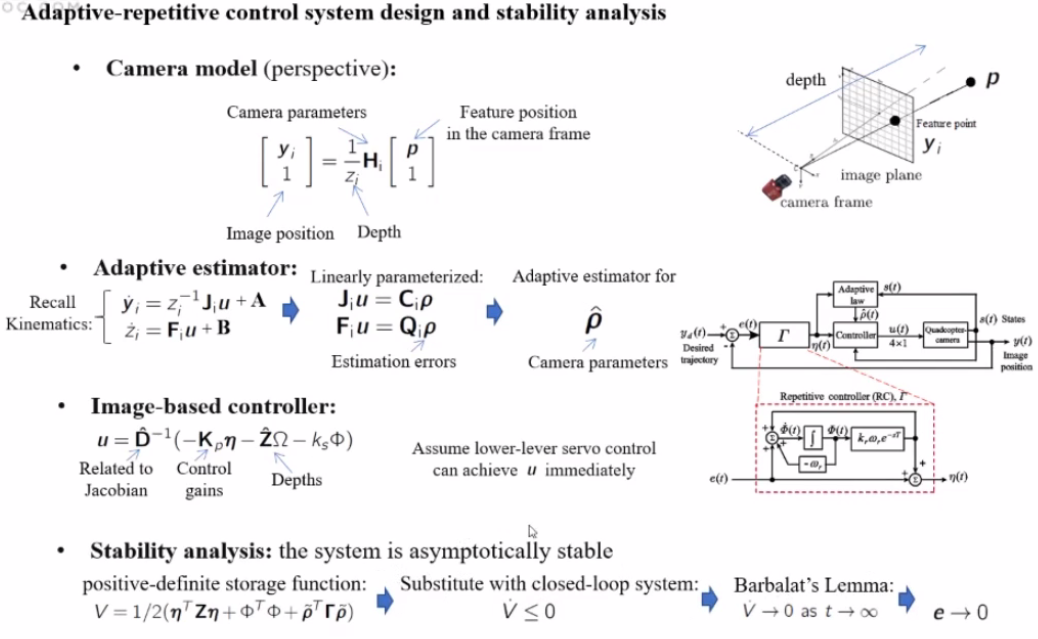
3.自适应方法的引入

4.解决周期跟踪误差的方法

存在问题

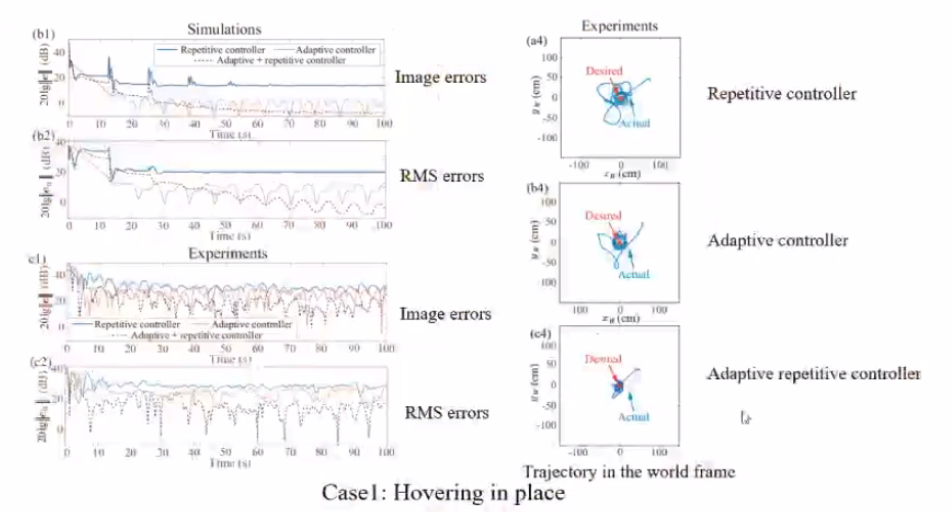
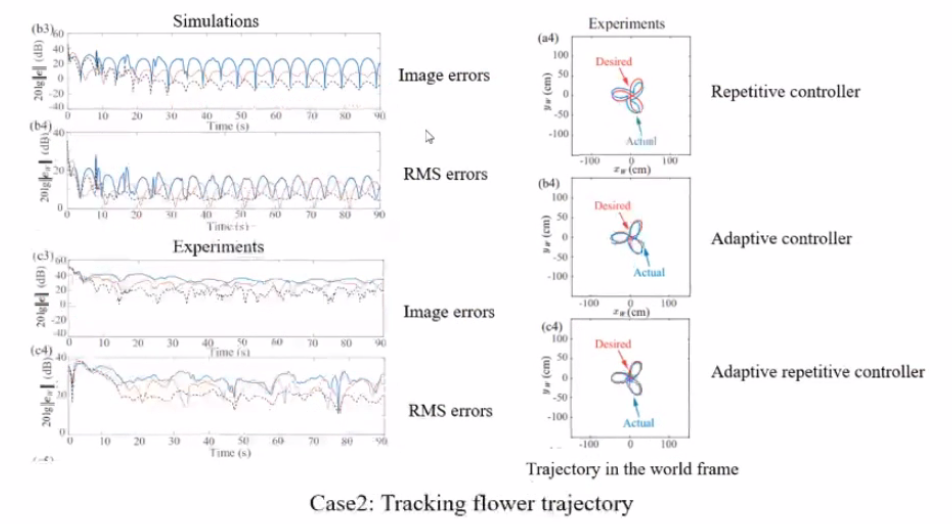
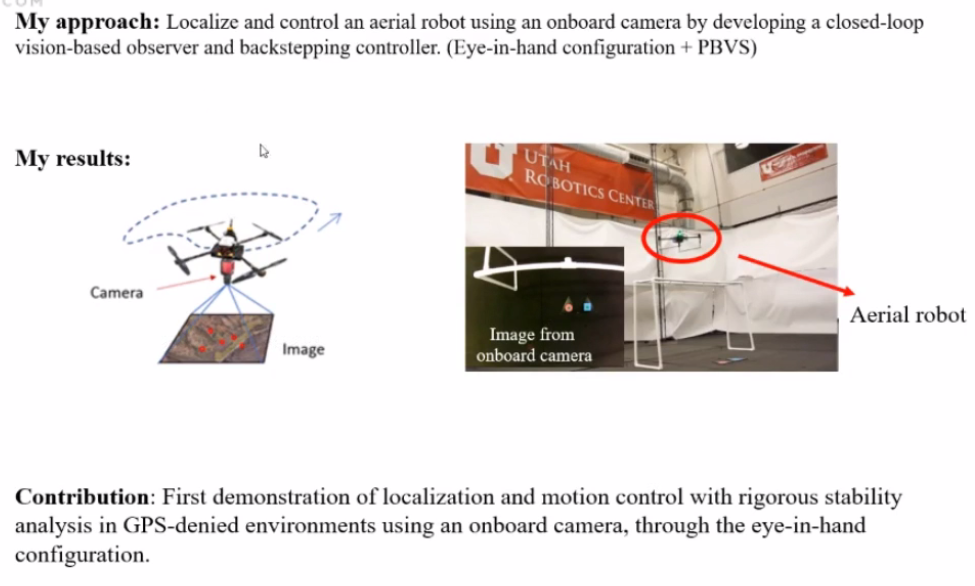
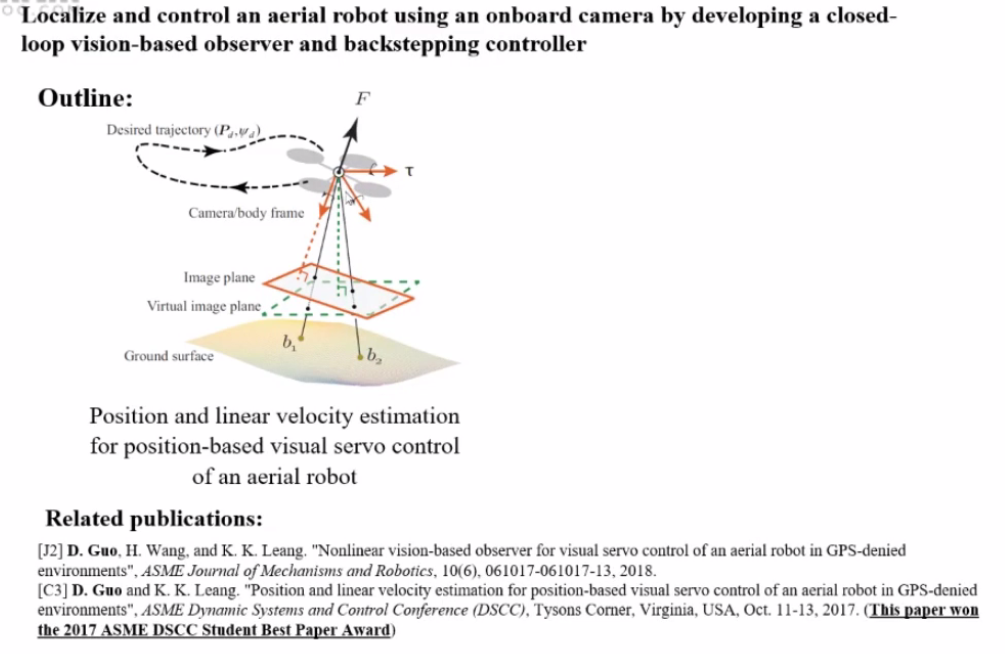
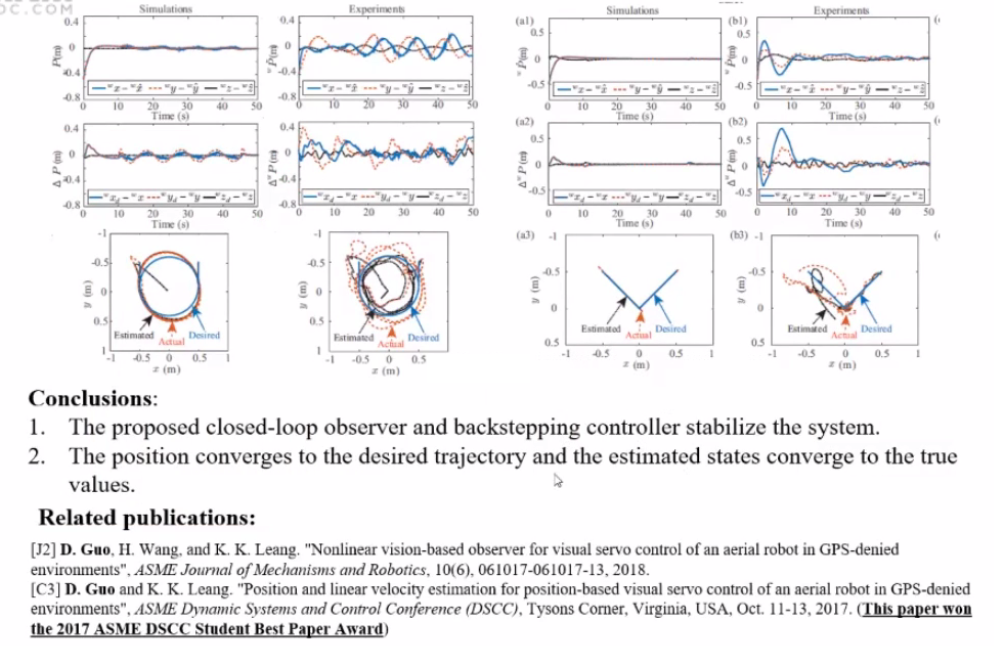
方法与结果

无人机携带摄像头
研究现状
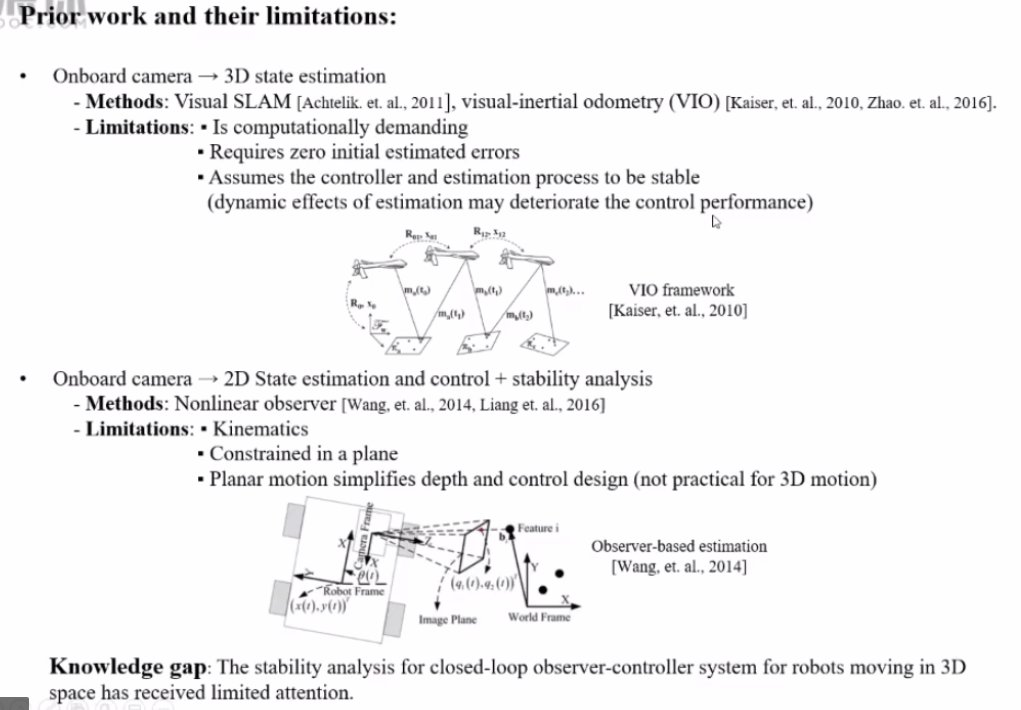
存在问题

工作


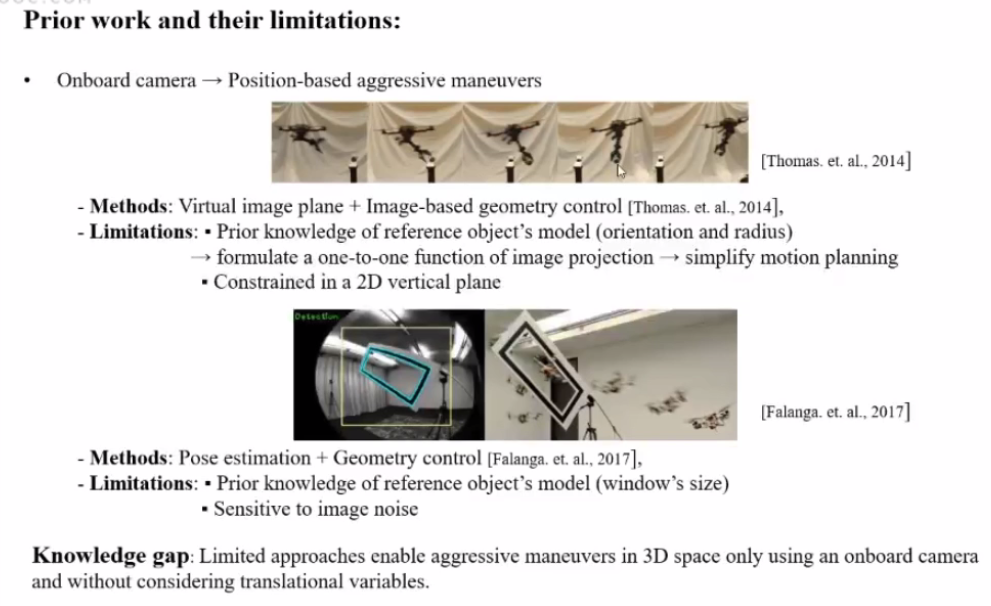
高速观察环境并穿越
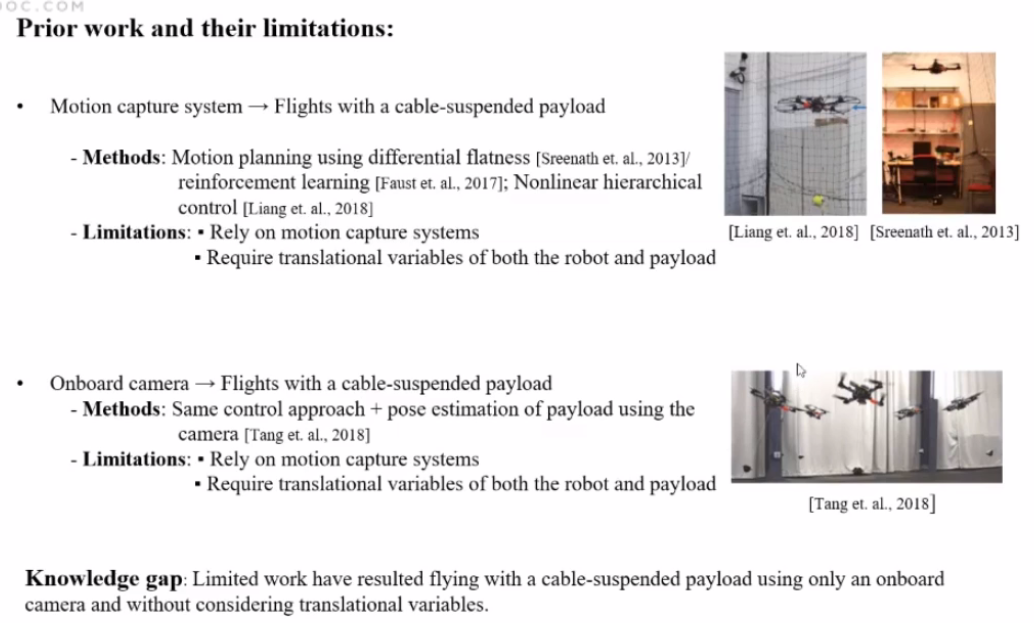
先前研究与不足
工作与结果

绳索吊重问题

总结