现在原来的基础上添加ADC的功能。
现在(利用STM32CubeMX来生成USB_HID_Mouse工程)基础上新增硬件
JoyStick Shield 游戏摇杆扩展板

与STM32F103C8的连接
目前使用
JoyStick Shield STM32F103C8
X----PA1(ADC1_IN1)
Y----PA2(ADC1_IN2)
好了我们现在STM32CubeMX来打开之前的工程

现在我们先设置ADC1_IN1
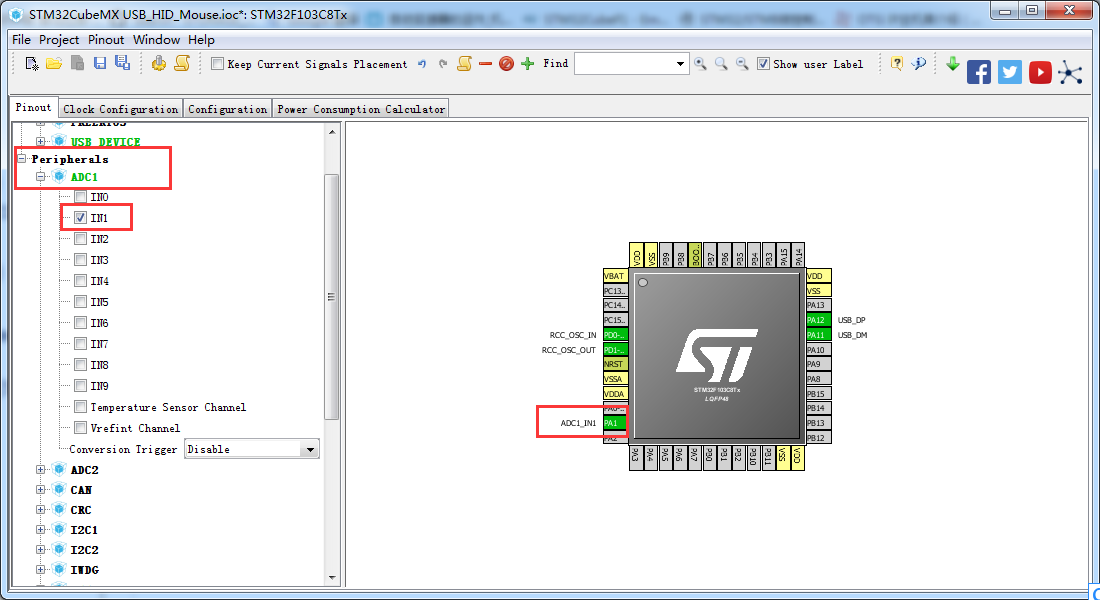
让我们来看其adc的默认配置

现在直接生成工程。
会发现在原来的工程基础上多了一些ADC的初始化函数等。
现在我们在main.C新增
/* USER CODE BEGIN PV */ /* Private variables ---------------------------------------------------------*/ uint16_t AD_X_Value = 0; /* USER CODE END PV */
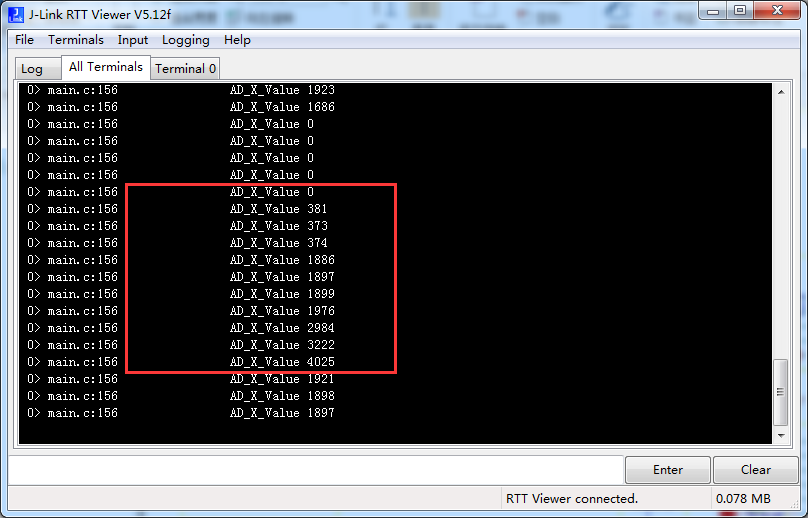
/* USER CODE BEGIN 3 */ /*##-1- Start the conversion process #######################################*/ HAL_ADC_Start(&hadc1);//<为启动ADC装换 /*##-2- Wait for the end of conversion #####################################*/ /** * Before starting a new conversion, you need to check the current state of * the peripheral; if it’s busy you need to wait for the end of current * conversion before starting a new one. * For simplicity reasons, this example is just waiting till the end of the * conversion, but application may perform other tasks while conversion * operation is ongoing. */ HAL_ADC_PollForConversion(&hadc1, 50);//<表示等待转换完成,第二个参数表示超时时间,单位ms. /* Check if the continous conversion of regular channel is finished */ if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1), HAL_ADC_STATE_REG_EOC)) { /*##-3- Get the converted value of regular channel ######################*/ AD_X_Value = HAL_ADC_GetValue(&hadc1); #ifdef RTT_LOG_ENABLED loge("AD_X_Value %d",AD_X_Value); #endif //RTT_LOG_ENABLED } #if 0 // Send HID report mouseHID.x = 10; USBD_HID_SendReport(&hUsbDeviceFS, (uint8_t*)&mouseHID, sizeof(struct mouseHID_t)); #endif HAL_Delay(1000); } /* USER CODE END 3 */
在加上我喜欢的RTT【不知道RTT的可以参考 [转]使用RTT(Real-Time Terminal)】
别忘记在main.c加上
/* USER CODE BEGIN Includes */ #include "usbd_hid.h" #ifdef RTT_LOG_ENABLED #include "rtt_log.h" #endif //RTT_LOG_ENABLED /* USER CODE END Includes */
将在HAL_MspInit()代码中 __HAL_AFIO_REMAP_SWJ_DISABLE();给注释掉
或者在STM32CubeMX配置的时候将SW接口的直接开启


下载编译
我们可以看到x轴变化的时候数据
关于STM32的ADC更多参考:
AN3116应用笔记 STM32™ 的 ADC 模式及其应用 .PDF
http://www.st.com/content/ccc/resource/technical/document/application_note/c4/63/a9/f4/ae/f2/48/5d/CD00258017.pdf/files/CD00258017.pdf/jcr:content/translations/zh.CD00258017.pdf
原版
STM32's ADC modes and their applications (AN3116)
http://www.st.com/content/ccc/resource/technical/document/application_note/c4/63/a9/f4/ae/f2/48/5d/CD00258017.pdf/files/CD00258017.pdf/jcr:content/translations/en.CD00258017.pdf